题目
求点P=(2,3,4)T绕x轴旋转45度后相对于参考坐标系的坐标。
求点P=(2,3,4)T绕x轴旋转45度后相对于参考坐标系的坐标。
题目解答
答案
解: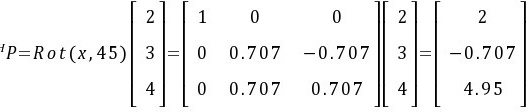
解析
考查要点:本题主要考查三维坐标系中点绕坐标轴旋转的坐标变换,涉及旋转矩阵的应用。
解题核心思路:
- 确定旋转矩阵:绕x轴旋转θ角的矩阵形式为:
$R_x(\theta) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos\theta & -\sin\theta \\ 0 & \sin\theta & \cos\theta \end{bmatrix}$ - 矩阵与向量相乘:将点坐标与旋转矩阵相乘,得到旋转后的坐标。
破题关键点:
- 正确写出旋转矩阵,注意绕x轴旋转时,y和z坐标参与变换,x坐标保持不变。
- 代入角度值(45°),计算对应的三角函数值($\cos45^\circ = \sin45^\circ \approx 0.707$)。
- 分步计算新坐标,避免计算错误。
步骤1:写出绕x轴旋转矩阵
绕x轴旋转45°的矩阵为:
$R_x(45^\circ) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 0.707 & -0.707 \\ 0 & 0.707 & 0.707 \end{bmatrix}$
步骤2:矩阵与点坐标相乘
点$P=(2,3,4)^T$与旋转矩阵相乘:
$\begin{bmatrix}1 & 0 & 0 \\0 & 0.707 & -0.707 \\0 & 0.707 & 0.707\end{bmatrix}
\begin{bmatrix}2 \\3 \\4\end{bmatrix}
=
\begin{bmatrix}2 \\0.707 \cdot 3 - 0.707 \cdot 4 \\0.707 \cdot 3 + 0.707 \cdot 4\end{bmatrix}$
步骤3:计算新坐标
- x坐标:$2$(保持不变)。
- y坐标:$3 \cdot 0.707 - 4 \cdot 0.707 = -0.707$。
- z坐标:$3 \cdot 0.707 + 4 \cdot 0.707 = 4.95$。