题目
写出齐次变换矩阵,它表示相对固定坐标系(A)作以下变换:首先绕Z轴转90º;然后再绕X轴转-90º;最后做移动(3,7,9)。
写出齐次变换矩阵 ,它表示相对固定坐标系{A}作以下变换:首先绕Z轴转90º;然后再绕X轴转-90º;最后做移动(3,7,9)
,它表示相对固定坐标系{A}作以下变换:首先绕Z轴转90º;然后再绕X轴转-90º;最后做移动(3,7,9) 。
。
,它表示相对固定坐标系{A}作以下变换:首先绕Z轴转90º;然后再绕X轴转-90º;最后做移动(3,7,9)。题目解答
答案
写出齐次变换矩阵,它表示相对固定坐标系{A}作以下变换:首先绕Z轴转90º;然后再绕X轴转-90º;最后做移动(3,7,9)。
,它表示相对固定坐标系{A}作以下变换:首先绕Z轴转90º;然后再绕X轴转-90º;最后做移动(3,7,9)。解: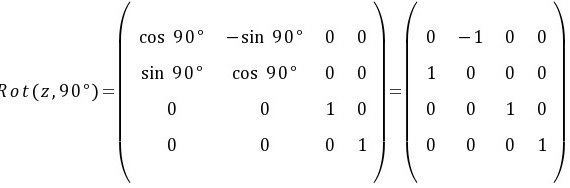 (表述计算正确得2.5分)
(表述计算正确得2.5分)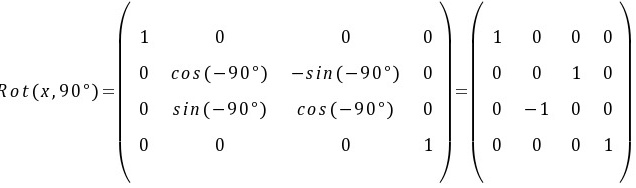 (表述计算正确得2.5分)
(表述计算正确得2.5分)
(表述计算正确得2.5分)(表述计算正确得2.5分)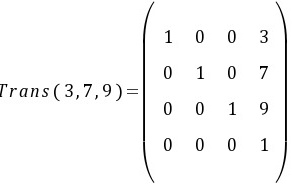 (表述计算正确得2.5分)
(表述计算正确得2.5分)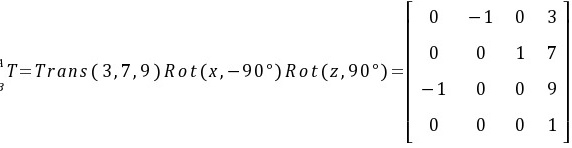 (表述计算正确得2.5分)
(表述计算正确得2.5分)(每点的齐次坐标计算正确各得2.5分)
解析
步骤 1:绕Z轴旋转90º
首先,我们需要计算绕Z轴旋转90º的旋转矩阵。绕Z轴旋转的旋转矩阵形式为:
$$
R_z(\theta) = \begin{bmatrix}
\cos\theta & -\sin\theta & 0 & 0 \\
\sin\theta & \cos\theta & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
将$\theta = 90^\circ$代入,得到:
$$
R_z(90^\circ) = \begin{bmatrix}
0 & -1 & 0 & 0 \\
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
步骤 2:绕X轴旋转-90º
接下来,我们需要计算绕X轴旋转-90º的旋转矩阵。绕X轴旋转的旋转矩阵形式为:
$$
R_x(\theta) = \begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & \cos\theta & -\sin\theta & 0 \\
0 & \sin\theta & \cos\theta & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
将$\theta = -90^\circ$代入,得到:
$$
R_x(-90^\circ) = \begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & -1 & 0 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
步骤 3:平移(3,7,9)
最后,我们需要计算平移(3,7,9)的平移矩阵。平移矩阵形式为:
$$
T = \begin{bmatrix}
1 & 0 & 0 & 3 \\
0 & 1 & 0 & 7 \\
0 & 0 & 1 & 9 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
步骤 4:组合变换
将上述三个变换矩阵组合起来,得到最终的齐次变换矩阵。组合顺序为先绕Z轴旋转,再绕X轴旋转,最后平移。因此,齐次变换矩阵为:
$$
T = T \cdot R_x(-90^\circ) \cdot R_z(90^\circ)
$$
将矩阵代入并计算:
$$
T = \begin{bmatrix}
1 & 0 & 0 & 3 \\
0 & 1 & 0 & 7 \\
0 & 0 & 1 & 9 \\
0 & 0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & -1 & 0 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
0 & -1 & 0 & 0 \\
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
计算结果为:
$$
T = \begin{bmatrix}
0 & -1 & 0 & 3 \\
0 & 0 & 1 & 7 \\
1 & 0 & 0 & 9 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
首先,我们需要计算绕Z轴旋转90º的旋转矩阵。绕Z轴旋转的旋转矩阵形式为:
$$
R_z(\theta) = \begin{bmatrix}
\cos\theta & -\sin\theta & 0 & 0 \\
\sin\theta & \cos\theta & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
将$\theta = 90^\circ$代入,得到:
$$
R_z(90^\circ) = \begin{bmatrix}
0 & -1 & 0 & 0 \\
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
步骤 2:绕X轴旋转-90º
接下来,我们需要计算绕X轴旋转-90º的旋转矩阵。绕X轴旋转的旋转矩阵形式为:
$$
R_x(\theta) = \begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & \cos\theta & -\sin\theta & 0 \\
0 & \sin\theta & \cos\theta & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
将$\theta = -90^\circ$代入,得到:
$$
R_x(-90^\circ) = \begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & -1 & 0 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
步骤 3:平移(3,7,9)
最后,我们需要计算平移(3,7,9)的平移矩阵。平移矩阵形式为:
$$
T = \begin{bmatrix}
1 & 0 & 0 & 3 \\
0 & 1 & 0 & 7 \\
0 & 0 & 1 & 9 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
步骤 4:组合变换
将上述三个变换矩阵组合起来,得到最终的齐次变换矩阵。组合顺序为先绕Z轴旋转,再绕X轴旋转,最后平移。因此,齐次变换矩阵为:
$$
T = T \cdot R_x(-90^\circ) \cdot R_z(90^\circ)
$$
将矩阵代入并计算:
$$
T = \begin{bmatrix}
1 & 0 & 0 & 3 \\
0 & 1 & 0 & 7 \\
0 & 0 & 1 & 9 \\
0 & 0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & -1 & 0 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
0 & -1 & 0 & 0 \\
1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
计算结果为:
$$
T = \begin{bmatrix}
0 & -1 & 0 & 3 \\
0 & 0 & 1 & 7 \\
1 & 0 & 0 & 9 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$