题目
F/N-|||-61-|||-4-|||-A-|||-B h/-|||-0 3 13-|||-甲 乙在科技节,大山同学用传感器设计了如图甲所示的力学装置,竖直细杆B的下端通过力传感器固定在容器底部,它的上端与不吸水的实心正方体A固定,不计细杆B及连接处的质量和体积。力传感器可以显示出细杆B的下端受到作用力的大小,现缓慢向容器中加水,当水深为13cm时正方体A刚好浸没,力传感器的示数大小F随水深h变化的图像如图乙所示。求:(g取10N/kg,ρ水=1.0×103kg/m3)(1)物体A所受到的重力;(2)当容器内水的深度为13cm时,正方体A受到的浮力大小;(3)当容器内水的深度为4cm时,力传感器的示数大小为F,继续向容器中加水,当力传感器的示数大小变为0.2F时,水对容器底的压强是多少?
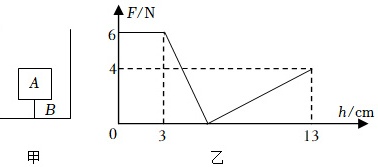 在科技节,大山同学用传感器设计了如图甲所示的力学装置,竖直细杆B的下端通过力传感器固定在容器底部,它的上端与不吸水的实心正方体A固定,不计细杆B及连接处的质量和体积。力传感器可以显示出细杆B的下端受到作用力的大小,现缓慢向容器中加水,当水深为13cm时正方体A刚好浸没,力传感器的示数大小F随水深h变化的图像如图乙所示。求:(g取10N/kg,ρ水=1.0×103kg/m3)
在科技节,大山同学用传感器设计了如图甲所示的力学装置,竖直细杆B的下端通过力传感器固定在容器底部,它的上端与不吸水的实心正方体A固定,不计细杆B及连接处的质量和体积。力传感器可以显示出细杆B的下端受到作用力的大小,现缓慢向容器中加水,当水深为13cm时正方体A刚好浸没,力传感器的示数大小F随水深h变化的图像如图乙所示。求:(g取10N/kg,ρ水=1.0×103kg/m3)(1)物体A所受到的重力;
(2)当容器内水的深度为13cm时,正方体A受到的浮力大小;
(3)当容器内水的深度为4cm时,力传感器的示数大小为F,继续向容器中加水,当力传感器的示数大小变为0.2F时,水对容器底的压强是多少?
题目解答
答案
解:(1)由图乙可知,当h0=0cm时,力传感器的示数为F0=6N,
由细杆的质量不考虑可知,正方体A对力传感器的压力等于自身的重力,即正方体A的重力G=F0=6N;
(2)由图乙可知,当h2=3cm时,物体A的下表面恰好与水面接触,
当容器内水的深度h1=13cm时,正方体A刚好浸没,
则正方体A的边长L=h浸1=13cm-3cm=10cm=0.1m,
因物体浸没时排开液体的体积和自身的体积相等,
所以,此时正方体A排开水的体积V排=L3=(0.1m)3=10-3m3,
正方体A受到的浮力F浮=ρ水gV排=1.0×103kg/m3×10N/kg×10-3m3=10N;
(3)当容器内水的深度h3=4cm时,正方体A浸入水的深度h浸2=h3-h2=4cm-3cm=1cm=0.01m,
排开水的体积V排′=L2h浸2=(0.1m)2×0.01m=10-4m3,
正方体A受到的浮力F浮′=ρ水gV排′=1.0×103kg/m3×10N/kg×10-4m3=1N,
力传感器的示数F=G-F浮′=6N-1N=5N,
继续向容器中加水,分力传感器受到的拉力或压力两种情况讨论力传感器的示数大小变为0.2F:
由图乙可知,第一种情况:当力传感器受到的拉力F′=0.2F=0.2×5N=1N且水的深度较大时,此时正方体A受到竖直向上的浮力和竖直向下重力、细杆的拉力作用处于平衡状态,
所以,由正方体受到的合力为零可得,受到的浮力F浮″=G+F′=6N+1N=7N,
由F浮=ρ液gV排=ρ液gSAh浸可得,
此时正方体浸入水中的深度h浸3=$\frac{{F}_{浮}^{''}}{{ρ}_{水}g{S}_{A}}$=$\frac{7N}{1.0×1{0}^{3}kg/{m}^{3}×10N/kg×(0.1m)^{2}}$=0.07m=7cm,
则此时容器内水的深度h4=h2+h浸3=3cm+7cm=10cm=0.1m,
则此时水对容器底的压强为:p=ρ液gh4=1.0×103kg/m3×10N/kg×0.1m=1000Pa;
第二种情况:当力传感器受到的压力F′=0.2F=0.2×5N=1N且水的深度较小时,此时正方体A受到竖直向上的浮力和竖直向下重力、细杆的压力作用处于平衡状态,
所以,由正方体受到的合力为零可得,受到的浮力F浮'''=G-F′=6N-1N=5N,
由F浮=ρ液gV排=ρ液gSAh浸可得,
此时正方体浸入水中的深度h浸4=$\frac{{F}_{浮}^{'''}}{{ρ}_{水}g{S}_{A}}$=$\frac{5N}{1.0×1{0}^{3}kg/{m}^{3}×10N/kg×(0.1m)^{2}}$=0.05m=5cm,
则此时容器内水的深度h5=h2+h浸4=3cm+5cm=8cm=0.08m,
则此时水对容器底的压强为:p'=ρ液gh5=1.0×103kg/m3×10N/kg×0.08m=800Pa。
答:(1)物体A所受到的重力为6N;
(2)当容器内水的深度为13cm时,正方体A受到的浮力为10N;
(3)当容器内水的深度为4cm时,力传感器的示数大小为F,继续向容器中加水,当力传感器的示数大小变为0.2F时,水对容器底的压强为800Pa或1000Pa。
由细杆的质量不考虑可知,正方体A对力传感器的压力等于自身的重力,即正方体A的重力G=F0=6N;
(2)由图乙可知,当h2=3cm时,物体A的下表面恰好与水面接触,
当容器内水的深度h1=13cm时,正方体A刚好浸没,
则正方体A的边长L=h浸1=13cm-3cm=10cm=0.1m,
因物体浸没时排开液体的体积和自身的体积相等,
所以,此时正方体A排开水的体积V排=L3=(0.1m)3=10-3m3,
正方体A受到的浮力F浮=ρ水gV排=1.0×103kg/m3×10N/kg×10-3m3=10N;
(3)当容器内水的深度h3=4cm时,正方体A浸入水的深度h浸2=h3-h2=4cm-3cm=1cm=0.01m,
排开水的体积V排′=L2h浸2=(0.1m)2×0.01m=10-4m3,
正方体A受到的浮力F浮′=ρ水gV排′=1.0×103kg/m3×10N/kg×10-4m3=1N,
力传感器的示数F=G-F浮′=6N-1N=5N,
继续向容器中加水,分力传感器受到的拉力或压力两种情况讨论力传感器的示数大小变为0.2F:
由图乙可知,第一种情况:当力传感器受到的拉力F′=0.2F=0.2×5N=1N且水的深度较大时,此时正方体A受到竖直向上的浮力和竖直向下重力、细杆的拉力作用处于平衡状态,
所以,由正方体受到的合力为零可得,受到的浮力F浮″=G+F′=6N+1N=7N,
由F浮=ρ液gV排=ρ液gSAh浸可得,
此时正方体浸入水中的深度h浸3=$\frac{{F}_{浮}^{''}}{{ρ}_{水}g{S}_{A}}$=$\frac{7N}{1.0×1{0}^{3}kg/{m}^{3}×10N/kg×(0.1m)^{2}}$=0.07m=7cm,
则此时容器内水的深度h4=h2+h浸3=3cm+7cm=10cm=0.1m,
则此时水对容器底的压强为:p=ρ液gh4=1.0×103kg/m3×10N/kg×0.1m=1000Pa;
第二种情况:当力传感器受到的压力F′=0.2F=0.2×5N=1N且水的深度较小时,此时正方体A受到竖直向上的浮力和竖直向下重力、细杆的压力作用处于平衡状态,
所以,由正方体受到的合力为零可得,受到的浮力F浮'''=G-F′=6N-1N=5N,
由F浮=ρ液gV排=ρ液gSAh浸可得,
此时正方体浸入水中的深度h浸4=$\frac{{F}_{浮}^{'''}}{{ρ}_{水}g{S}_{A}}$=$\frac{5N}{1.0×1{0}^{3}kg/{m}^{3}×10N/kg×(0.1m)^{2}}$=0.05m=5cm,
则此时容器内水的深度h5=h2+h浸4=3cm+5cm=8cm=0.08m,
则此时水对容器底的压强为:p'=ρ液gh5=1.0×103kg/m3×10N/kg×0.08m=800Pa。
答:(1)物体A所受到的重力为6N;
(2)当容器内水的深度为13cm时,正方体A受到的浮力为10N;
(3)当容器内水的深度为4cm时,力传感器的示数大小为F,继续向容器中加水,当力传感器的示数大小变为0.2F时,水对容器底的压强为800Pa或1000Pa。
解析
步骤 1:确定物体A的重力
由图乙可知,当水深为0cm时,力传感器的示数为6N,这表示物体A的重力G等于6N。
步骤 2:计算物体A的浮力
当水深为13cm时,物体A刚好浸没,此时物体A的边长为10cm,排开水的体积为10^{-3}m^{3},根据阿基米德原理,物体A受到的浮力F_浮=ρ_水gV_排=10N。
步骤 3:计算水对容器底的压强
当水深为4cm时,力传感器的示数为5N,继续加水,当力传感器的示数变为0.2F时,有两种情况:力传感器受到的拉力或压力。根据浮力和重力的关系,计算出水的深度,进而计算出水对容器底的压强。
由图乙可知,当水深为0cm时,力传感器的示数为6N,这表示物体A的重力G等于6N。
步骤 2:计算物体A的浮力
当水深为13cm时,物体A刚好浸没,此时物体A的边长为10cm,排开水的体积为10^{-3}m^{3},根据阿基米德原理,物体A受到的浮力F_浮=ρ_水gV_排=10N。
步骤 3:计算水对容器底的压强
当水深为4cm时,力传感器的示数为5N,继续加水,当力传感器的示数变为0.2F时,有两种情况:力传感器受到的拉力或压力。根据浮力和重力的关系,计算出水的深度,进而计算出水对容器底的压强。