题目
初三(5)班的同学在物理课上探究“杠杆的平衡条件”,老师提供的器材有:杠杆(包含支架、平衡螺母)、钩码(每个钩码质量均为50g)、弹簧测力计。9 园-|||-多 数-|||-ol 山 多-|||-g + H-|||-00 Q-|||-下 a ,q 4 o a-|||-园 乙圆 圈-|||-+ H + H-|||-g F(1)器材放在水平桌面上,杠杆处于如图1所示的情况,此时杠杆是否处于平衡状态? ____ (选填“是”或“否”)。为了使杠杆能在水平位置平衡,应将杠杆的平衡螺母向 ____ 调(选填“左”或“右”)。(2)第一组同学在杠杆支点的两边分别挂钩码来探究杠杆的平衡条件:①如图2所示,杠杆在水平位置平衡后,在A点悬挂2个钩码,要使杠杆在水平位置再次平衡,需在B点悬挂 ____ 个钩码;之后在A、B两点再各增加1个钩码,杠杆将 ____ (选填“不动”、“顺时针旋转”或“逆时针旋转”)。②按现有方案进行实验,测得的数据如表所示 测量序号 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm ① 1 20 2 10 ② 2 15 1.5 20 ③ 3 5 1 15 第一组同学得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆平衡条件不符,原因是实验过程中 ____ 。A.没有改变力的大小B.没有改变力的方向C.没有改变力的作用点D.实验次数较少,结论具有偶然性③组内成员小明用如图3所示的方式悬挂钩码,使杠杆处于水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是因为此种方式 ____ 。A.一个人无法独立操作B.需要使用太多的钩码C.力臂与杠杆不重合D.力和力臂数目过多④图3中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第 ____ 格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。(3)在老师的指导下,第一小组的同学重新设计了实验过程,经历如下一些操作步骤:a.安装好杠杆并调节平衡螺母使其在水平位置平衡b.改变两边钩码数量,重复以上步骤再做两次实验c.改变挂钩码的位置,使杠杆在水平位置平衡,记录实验数据d.在杠杆两边分别挂上数量不同钩码①本实验的合理操作步骤顺序是 ____ 。②调节杠杆水平平衡后,如图4所示,在A处挂两个钩码,为了使杠杆水平平衡,在C点竖直向下施加的拉力大小为 ____ N。若在C点用调节好的弹簧测力计沿图示方向斜向下拉,当测力计示数F1为 ____ N时,杠杆将水平平衡。③通过多次实验,总结得出杠杆平衡的条件 ____ 。所以对于杠杆“哪边重往哪边沉”这句话的理解,这里的“重”实际指的是 ____ 大。④探究过程中,在杠杆左端的D点挂一个重物G,在杠杆右端的E点施加一始终竖直向下的拉力F2,使杠杆由水平位置缓慢转动到图中虚线位置,如图5所示。则在此过程中拉力F2的大小变化情况是 ____ (选填“变大”、“变小”或“不变”)。(4)课后,第一小组同学对杠杆进行了深入探究,如图6所示,若将钩码的悬挂点由A移至C(钩码个数不变,O和B的位置也不变),仍将钩码提升相同的高度,则杠杆的机械效率将 ____ (选填“变大”、“变小”或“不变”)。
初三(5)班的同学在物理课上探究“杠杆的平衡条件”,老师提供的器材有:杠杆(包含支架、平衡螺母)、钩码(每个钩码质量均为50g)、弹簧测力计。
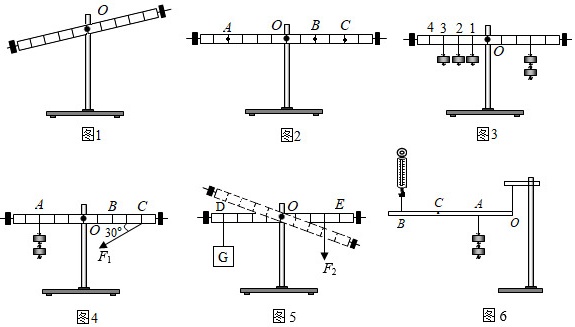
(1)器材放在水平桌面上,杠杆处于如图1所示的情况,此时杠杆是否处于平衡状态? ____ (选填“是”或“否”)。为了使杠杆能在水平位置平衡,应将杠杆的平衡螺母向 ____ 调(选填“左”或“右”)。
(2)第一组同学在杠杆支点的两边分别挂钩码来探究杠杆的平衡条件:
①如图2所示,杠杆在水平位置平衡后,在A点悬挂2个钩码,要使杠杆在水平位置再次平衡,需在B点悬挂 ____ 个钩码;之后在A、B两点再各增加1个钩码,杠杆将 ____ (选填“不动”、“顺时针旋转”或“逆时针旋转”)。
②按现有方案进行实验,测得的数据如表所示
第一组同学得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆平衡条件不符,原因是实验过程中 ____ 。
A.没有改变力的大小
B.没有改变力的方向
C.没有改变力的作用点
D.实验次数较少,结论具有偶然性
③组内成员小明用如图3所示的方式悬挂钩码,使杠杆处于水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是因为此种方式 ____ 。
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
④图3中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第 ____ 格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。
(3)在老师的指导下,第一小组的同学重新设计了实验过程,经历如下一些操作步骤:
a.安装好杠杆并调节平衡螺母使其在水平位置平衡
b.改变两边钩码数量,重复以上步骤再做两次实验
c.改变挂钩码的位置,使杠杆在水平位置平衡,记录实验数据
d.在杠杆两边分别挂上数量不同钩码
①本实验的合理操作步骤顺序是 ____ 。
②调节杠杆水平平衡后,如图4所示,在A处挂两个钩码,为了使杠杆水平平衡,在C点竖直向下施加的拉力大小为 ____ N。若在C点用调节好的弹簧测力计沿图示方向斜向下拉,当测力计示数F1为 ____ N时,杠杆将水平平衡。
③通过多次实验,总结得出杠杆平衡的条件 ____ 。所以对于杠杆“哪边重往哪边沉”这句话的理解,这里的“重”实际指的是 ____ 大。
④探究过程中,在杠杆左端的D点挂一个重物G,在杠杆右端的E点施加一始终竖直向下的拉力F2,使杠杆由水平位置缓慢转动到图中虚线位置,如图5所示。则在此过程中拉力F2的大小变化情况是 ____ (选填“变大”、“变小”或“不变”)。
(4)课后,第一小组同学对杠杆进行了深入探究,如图6所示,若将钩码的悬挂点由A移至C(钩码个数不变,O和B的位置也不变),仍将钩码提升相同的高度,则杠杆的机械效率将 ____ (选填“变大”、“变小”或“不变”)。
(1)器材放在水平桌面上,杠杆处于如图1所示的情况,此时杠杆是否处于平衡状态? ____ (选填“是”或“否”)。为了使杠杆能在水平位置平衡,应将杠杆的平衡螺母向 ____ 调(选填“左”或“右”)。
(2)第一组同学在杠杆支点的两边分别挂钩码来探究杠杆的平衡条件:
①如图2所示,杠杆在水平位置平衡后,在A点悬挂2个钩码,要使杠杆在水平位置再次平衡,需在B点悬挂 ____ 个钩码;之后在A、B两点再各增加1个钩码,杠杆将 ____ (选填“不动”、“顺时针旋转”或“逆时针旋转”)。
②按现有方案进行实验,测得的数据如表所示
| 测量序号 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 1 | 15 |
A.没有改变力的大小
B.没有改变力的方向
C.没有改变力的作用点
D.实验次数较少,结论具有偶然性
③组内成员小明用如图3所示的方式悬挂钩码,使杠杆处于水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是因为此种方式 ____ 。
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
④图3中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第 ____ 格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。
(3)在老师的指导下,第一小组的同学重新设计了实验过程,经历如下一些操作步骤:
a.安装好杠杆并调节平衡螺母使其在水平位置平衡
b.改变两边钩码数量,重复以上步骤再做两次实验
c.改变挂钩码的位置,使杠杆在水平位置平衡,记录实验数据
d.在杠杆两边分别挂上数量不同钩码
①本实验的合理操作步骤顺序是 ____ 。
②调节杠杆水平平衡后,如图4所示,在A处挂两个钩码,为了使杠杆水平平衡,在C点竖直向下施加的拉力大小为 ____ N。若在C点用调节好的弹簧测力计沿图示方向斜向下拉,当测力计示数F1为 ____ N时,杠杆将水平平衡。
③通过多次实验,总结得出杠杆平衡的条件 ____ 。所以对于杠杆“哪边重往哪边沉”这句话的理解,这里的“重”实际指的是 ____ 大。
④探究过程中,在杠杆左端的D点挂一个重物G,在杠杆右端的E点施加一始终竖直向下的拉力F2,使杠杆由水平位置缓慢转动到图中虚线位置,如图5所示。则在此过程中拉力F2的大小变化情况是 ____ (选填“变大”、“变小”或“不变”)。
(4)课后,第一小组同学对杠杆进行了深入探究,如图6所示,若将钩码的悬挂点由A移至C(钩码个数不变,O和B的位置也不变),仍将钩码提升相同的高度,则杠杆的机械效率将 ____ (选填“变大”、“变小”或“不变”)。
题目解答
答案
解:(1)杠杆静止在如图甲所示位置,杠杆静止,此时杠杆处于平衡状态;
杠杆左端下沉,说明杠杆的重心在支点左侧,调节平衡螺母应使杠杆重心右移,使杠杆在水平位置平衡;
(2)①设一个钩码的重是G,杠杆一个小格代表L,在B点时,
根据杠杆平衡条件F1L1=F2L2得,
2G×3L=F2×2L,
解得:F2=3G,即4个钩码。
图乙中杠杆水平平衡后,在杠杆左右两边钩码下同时去掉一个相同的钩码,
左端:2G×2L=4GL,右端:G×3L=3GL,
左端大于右端,故左端下沉;
②“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,也就是实验过程中没有改变动力或阻力的方向。故选项A、C、D错误,选项B正确;
③实验中,如图所示的方式悬挂钩码,杠杆平衡是杠杆的左侧在多个力共同作用的结果,采用这种方式是不妥当的。这主要是因为杠杆的力和力臂数目过多;
④设一个钩码的重是G,杠杆一个小格代表L,钩码应挂在n格,
根据杠杆平衡条件F1L1=F2L2得,
3G×nL=2G×3L,解得:n=2,所以应保持左侧第2格钩码不动;
(3)①在研究杠杆平衡实验时,先组装好,然后调节杠杆在水平位置平衡,然后利用钩码进行实验,使杠杆在水平位置平,再改变力和力臂的数值,再做几次实验,对数据进行分析得出结论故合理的顺序为adcb;
②(2)一个钩码的重是G=mg=0.05kg×10N/kg=0.5N,杠杆一个小格代表L,在C点竖直向下施加的拉力时,
根据杠杆平衡条件F1L1=F2L2得,
2G×3L=F2×4L,
解得:F2=1.5G=1.5×0.5N=0.75N;
若在C点用调节好的弹簧测力计沿图示方向斜向下拉时,根据直角三角形中30°角所对应的直角边等于斜边的一半,故LC=2L,
根据杠杆的平衡条件F1L1=F2L2得,
2G×3L=FC×2L,
解得:FC=3G=3×0.5N=1.5N;
③通过多次实验,总结得出杠杆平衡的条件F1L1=F2L2。所以对于杠杆“哪边重往哪边沉”这句话的理解,这里的“重”实际指的是指力与力臂的乘积大;
④图5使杠杆由水平位置时,根据杠杆平衡条件F1L1=F2L2得,
G×4L=F2×3L,
则F2=$\frac{4}{3}$G;
当转动到图中虚线位置时,设杠杆与水平位置的夹角为α,则根据杠杆平衡条件F1L1=F2L2得,
G×4L×cosα=F2′×3L×cosα,
则:F2′=$\frac{4}{3}$G;
所以,在此过程中拉力F2的大小不变;
(4)由题意知,将钩码从A点移到C点,仍将钩码提升相同的高度,有用功不变,因为杠杆自身重力不变,提升的高度减小,额外功减小,因此杠杆的机械效率变大。
故答案为:(1)是;右;(2)①4;逆时针旋转;②B;③D;④2;
(3)①adcb;②0.75;1.5;③F1L1=F2L2;力与力臂的乘积;④不变;
(4)变大。
杠杆左端下沉,说明杠杆的重心在支点左侧,调节平衡螺母应使杠杆重心右移,使杠杆在水平位置平衡;
(2)①设一个钩码的重是G,杠杆一个小格代表L,在B点时,
根据杠杆平衡条件F1L1=F2L2得,
2G×3L=F2×2L,
解得:F2=3G,即4个钩码。
图乙中杠杆水平平衡后,在杠杆左右两边钩码下同时去掉一个相同的钩码,
左端:2G×2L=4GL,右端:G×3L=3GL,
左端大于右端,故左端下沉;
②“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,也就是实验过程中没有改变动力或阻力的方向。故选项A、C、D错误,选项B正确;
③实验中,如图所示的方式悬挂钩码,杠杆平衡是杠杆的左侧在多个力共同作用的结果,采用这种方式是不妥当的。这主要是因为杠杆的力和力臂数目过多;
④设一个钩码的重是G,杠杆一个小格代表L,钩码应挂在n格,
根据杠杆平衡条件F1L1=F2L2得,
3G×nL=2G×3L,解得:n=2,所以应保持左侧第2格钩码不动;
(3)①在研究杠杆平衡实验时,先组装好,然后调节杠杆在水平位置平衡,然后利用钩码进行实验,使杠杆在水平位置平,再改变力和力臂的数值,再做几次实验,对数据进行分析得出结论故合理的顺序为adcb;
②(2)一个钩码的重是G=mg=0.05kg×10N/kg=0.5N,杠杆一个小格代表L,在C点竖直向下施加的拉力时,
根据杠杆平衡条件F1L1=F2L2得,
2G×3L=F2×4L,
解得:F2=1.5G=1.5×0.5N=0.75N;
若在C点用调节好的弹簧测力计沿图示方向斜向下拉时,根据直角三角形中30°角所对应的直角边等于斜边的一半,故LC=2L,
根据杠杆的平衡条件F1L1=F2L2得,
2G×3L=FC×2L,
解得:FC=3G=3×0.5N=1.5N;
③通过多次实验,总结得出杠杆平衡的条件F1L1=F2L2。所以对于杠杆“哪边重往哪边沉”这句话的理解,这里的“重”实际指的是指力与力臂的乘积大;
④图5使杠杆由水平位置时,根据杠杆平衡条件F1L1=F2L2得,
G×4L=F2×3L,
则F2=$\frac{4}{3}$G;
当转动到图中虚线位置时,设杠杆与水平位置的夹角为α,则根据杠杆平衡条件F1L1=F2L2得,
G×4L×cosα=F2′×3L×cosα,
则:F2′=$\frac{4}{3}$G;
所以,在此过程中拉力F2的大小不变;
(4)由题意知,将钩码从A点移到C点,仍将钩码提升相同的高度,有用功不变,因为杠杆自身重力不变,提升的高度减小,额外功减小,因此杠杆的机械效率变大。
故答案为:(1)是;右;(2)①4;逆时针旋转;②B;③D;④2;
(3)①adcb;②0.75;1.5;③F1L1=F2L2;力与力臂的乘积;④不变;
(4)变大。