题目
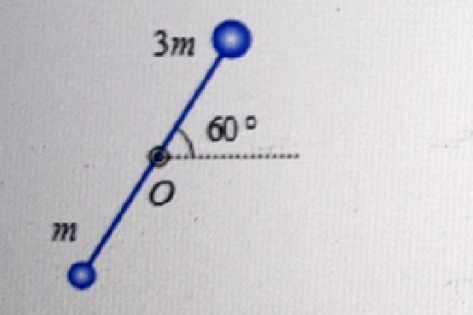
如图所示一 根长 2 L 的轻质细杆,两端固定质量分别为 m 和 3 m 的小球,此系统在竖直平面内可绕过中 点 O 且与杆垂直的水平光滑固定轴转动。 开始时杆与水平面成 60° 角,且处于静止状态 ,现将杆无初转速地释放 ,当杆转至水平状态时杆的角速度为 =( )
如图所示一 根长 2 L 的轻质细杆,两端固定质量分别为 m 和 3 m 的小球,此系统在竖直平面内可绕过中 点 O 且与杆垂直的水平光滑固定轴转动。 开始时杆与水平面成 60° 角,且处于静止状态 ,现将杆无初转速地释放 ,当杆转至水平状态时杆的角速度为  =( )
=( )
题目解答
答案
解:J=mL +3mL=4mL
+3mL=4mL
M=3mgL-mgL=2mgL
M=J
=
解析
步骤 1:计算系统的转动惯量
系统由两个小球组成,它们分别位于杆的两端。根据转动惯量的定义,对于质量为 m 的小球,其转动惯量为 $mL^2$,对于质量为 3m 的小球,其转动惯量为 $3mL^2$。因此,系统的总转动惯量为 $J = mL^2 + 3mL^2 = 4mL^2$。
步骤 2:计算系统的重力势能变化
当杆从与水平面成 60° 角的位置转至水平状态时,质量为 m 的小球下降了 $L\sin(60°) = \frac{\sqrt{3}}{2}L$,质量为 3m 的小球上升了相同的距离。因此,系统的重力势能变化为 $\Delta U = -mg\frac{\sqrt{3}}{2}L + 3mg\frac{\sqrt{3}}{2}L = 2mg\frac{\sqrt{3}}{2}L = \sqrt{3}mgL$。
步骤 3:应用机械能守恒定律
由于系统在转动过程中没有外力做功,因此系统的机械能守恒。初始时,系统的动能为零,重力势能为 $\sqrt{3}mgL$。当杆转至水平状态时,系统的动能为 $\frac{1}{2}J\omega^2$,重力势能为零。根据机械能守恒定律,有 $\sqrt{3}mgL = \frac{1}{2}J\omega^2$。将转动惯量 $J = 4mL^2$ 代入,得到 $\sqrt{3}mgL = \frac{1}{2} \cdot 4mL^2 \cdot \omega^2$,解得 $\omega = \sqrt{\frac{\sqrt{3}g}{2L}}$。
系统由两个小球组成,它们分别位于杆的两端。根据转动惯量的定义,对于质量为 m 的小球,其转动惯量为 $mL^2$,对于质量为 3m 的小球,其转动惯量为 $3mL^2$。因此,系统的总转动惯量为 $J = mL^2 + 3mL^2 = 4mL^2$。
步骤 2:计算系统的重力势能变化
当杆从与水平面成 60° 角的位置转至水平状态时,质量为 m 的小球下降了 $L\sin(60°) = \frac{\sqrt{3}}{2}L$,质量为 3m 的小球上升了相同的距离。因此,系统的重力势能变化为 $\Delta U = -mg\frac{\sqrt{3}}{2}L + 3mg\frac{\sqrt{3}}{2}L = 2mg\frac{\sqrt{3}}{2}L = \sqrt{3}mgL$。
步骤 3:应用机械能守恒定律
由于系统在转动过程中没有外力做功,因此系统的机械能守恒。初始时,系统的动能为零,重力势能为 $\sqrt{3}mgL$。当杆转至水平状态时,系统的动能为 $\frac{1}{2}J\omega^2$,重力势能为零。根据机械能守恒定律,有 $\sqrt{3}mgL = \frac{1}{2}J\omega^2$。将转动惯量 $J = 4mL^2$ 代入,得到 $\sqrt{3}mgL = \frac{1}{2} \cdot 4mL^2 \cdot \omega^2$,解得 $\omega = \sqrt{\frac{\sqrt{3}g}{2L}}$。