考虑一根自然长度为l、截面积为A的均匀长棒(见图1),当其两端面受到大小相等、方向相反的法向作用力F时,其长度的改变量为Delta l,应力T定义为F/A,而长度的相对变化即Delta l/l,则称为应变S.用应力和应变表示胡克定律,可写为T=YS或dfrac(F)(A)=Ydfrac( Delta l)(l)(1)上式中的比例常数Y称为棒材料的杨氏模量.注意:压应力T会使棒的长度缩短,其所对应的纵向作用力为负值(即F < 0),长度的变化量也为负值(即Delta l < 0),故压应力与压强p的关系为p=-T.对密度为rho的均匀长棒而言,沿棒传播的纵波(即声波),其波速u可由下式给出:u=sqrt(dfrac(Y){ rho )}(2)在回答以下问题中,假设阻尼及损耗效应皆可忽略.z-|||-y A-|||-F. --- --- F-|||-x-|||-----|||-l △l(1)A部分 力学性质一根由x=0延伸至x= infty的均匀半无限长棒,密度为rho,最初静止,且不受应力.在一很短的时间间隔Delta t内,以活塞对x=0处的棒的左端面,施加大小恒定的压力,使产生一压力波,以速率u向右传播,如图所示.z-|||-y A-|||-F. --- --- F-|||-x-|||-----|||-l △l①若棒的左端面以恒定速度v运动(见图),在时间Delta t内,棒左端之应变S与压强p各为何?(答案只能以rho,u,v表示.)②考虑棒内沿x方向行进的纵波.以x表示棒内一横截面无应力下的平衡位置(见图),以xi (x,t)表示此横截面在时刻t的位移,并设xi (x,t)= xi _(0) sin k(x-ut)(3)式中xi_(0)及k为常量,试求出速度v(x,t)、应变S(x,t)及压强p(x,t)随x与t变化函数.z-|||-y A-|||-F. --- --- F-|||-x-|||-----|||-l △l(2)B部分 机电性质(包括压电效应)考虑一块长度为b、宽度为w、厚度为h的均匀石英晶片(见图4),其长度沿x轴,厚度沿z轴,晶片的上、下表面各镀有一层金属薄膜作为电极,焊接在电极中心点的两条弓|线兼作为支柱(见图5).对沿x轴的纵向振动而言,这两个电极中心点可视为固定不动.z-|||-y A-|||-F. --- --- F-|||-x-|||-----|||-l △lz-|||-y A-|||-F. --- --- F-|||-x-|||-----|||-l △l此石英晶体的密度rho为2.65times 10^3 (kg/m^3),杨氏模量Y为7.87times 10^10 (N/m^2),晶片的长度b为(1.00)(cm),而宽度w与厚度h则满足w ll b与hll w.当开关K未闭合时,石英晶片中只激发起沿x轴方向的纵向模式的驻波振动.对于频率为f= omega /2 pi的驻波,平衡位置位于x处的截面,在时刻t,其位移xi (x,t)可以表示为xi (x,t)=2 xi _(0)g(x) cos omega t(0 leqslant x leqslant b)(4a)式中xi _(0)为正常量,而位置函数g(x)可表示为下列形式:g(x)=B_(1) sin k(x-dfrac(b)(2))+B_(2) cos k(x-dfrac(b)(2))(4b)g(x)的最大值为1,式中k= omega /u.请记住电极的中心是静止的,而晶片的左、右端面是自由的,因而应力(或压强)为零.①就此石英晶片的纵驻波,确定方程(4b)中的B_(1)和B_(2)值.②此石英晶片中激发的纵驻波的两个最低频率为何?压电效应是石英晶体的一种特性.晶体被压缩或拉伸时,其两端会产生电压;反之,若在晶体两端施加电压,则依据电压的极性,晶体会伸张或收缩.因而,机械振动和电振动会通过石英晶体互相耦合并引起共振.为说明压电效应,设当石英晶片中存在沿z方向的电场E时,其上、下电极的电荷面密度分别为+ sigma与- sigma.分别以S与T表示晶片沿x方向的应变与应力,则此石英晶片的压电效应,可用下列一组关系式表示:S=dfrac(1)(Y)T+(d)_(P)E(5a)sigma =(d)_(p)T+ varepsilon _(T)E(5b)其中1/Y=1.27times 10^-11 (m^2/N)为定电场下的弹性顺度(即杨氏模量Y的倒数),varepsilon _(T)=4.06times 10^-11 (F/m)为定应力下的电容率,(d)_(p)=2.25times 10^-12 (m/V)则为压电常量.将图4中的开关K接通,则两电极间加有交变电压V(t)=v_({m)} cos omega t,从而在晶片中存在一均匀电场E(t)=V(t)/h.最后会达到稳定态,晶片中出现沿x方向、角频率为omega的纵驻波振荡.当电场E均匀时,纵驻波的波长lambda与频率f的关系仍满足lambda =u/f,其中u由(2)式给定.但是正如(5a)式所示,T=YS不再成立,尽管应力与应变的定义保持不变,且晶片两端面保持自由而无应力.③考虑方程(5a)和(5b),下电极板上的电荷面密度sigma随x与t变化的函数为sigma (x,t)= lbrack D_(1) cos k(x-dfrac(b)(2))+D_(2) rbrackdfrac(V(t))(h)式中k= omega /u.求D_(1),D_(2)的表示式.④下电极上的总电荷Q(t)与电压V(t)的关系为Q(t)= lbrack 1+ alpha ^2 (dfrac(2)(kb)tan dfrac(kb)(2)-1 ) rbrack C_(0)V(t) (6)试求出常数C_(0)的表示式与alpha ^2的表示式及其数值.
考虑一根自然长度为$l$、截面积为$A$的均匀长棒(见图1),当其两端面受到大小相等、方向相反的法向作用力$F$时,其长度的改变量为$\Delta l$,应力$T$定义为$F/A$,而长度的相对变化即$\Delta l/l$,则称为应变$S$.用应力和应变表示胡克定律,可写为$T=YS$或
$\dfrac{F}{A}=Y\dfrac{ \Delta l}{l}$(1)
上式中的比例常数$Y$称为棒材料的杨氏模量.注意:压应力$T$会使棒的长度缩短,其所对应的纵向作用力为负值(即$F < 0$),长度的变化量也为负值(即$\Delta l < 0$),故压应力与压强$p$的关系为$p=-T$.
对密度为$\rho$的均匀长棒而言,沿棒传播的纵波(即声波),其波速$u$可由下式给出:
$u=\sqrt{\dfrac{Y}{ \rho }}$(2)
在回答以下问题中,假设阻尼及损耗效应皆可忽略.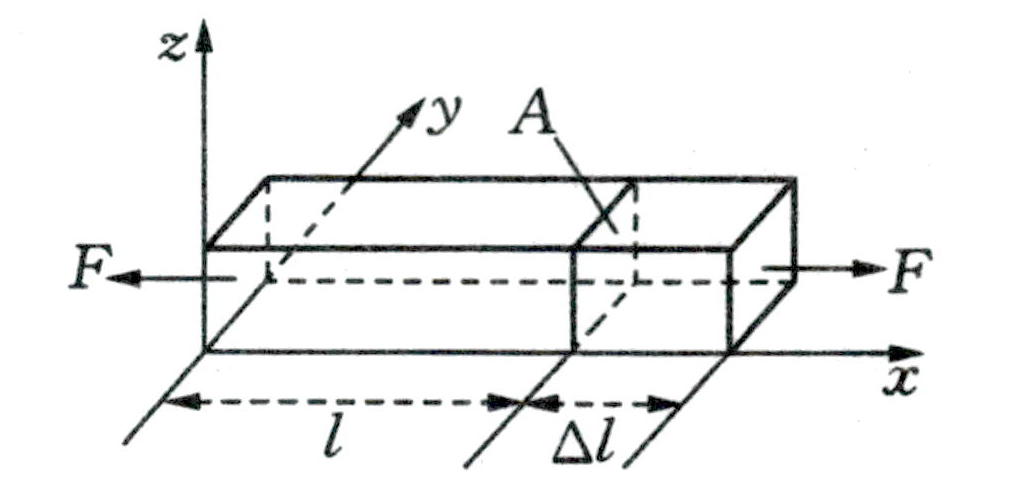
(1)A部分 力学性质
一根由$x=0$延伸至$x= \infty$的均匀半无限长棒,密度为$\rho$,最初静止,且不受应力.在一很短的时间间隔$\Delta t$内,以活塞对$x=0$处的棒的左端面,施加大小恒定的压力,使产生一压力波,以速率$u$向右传播,如图所示.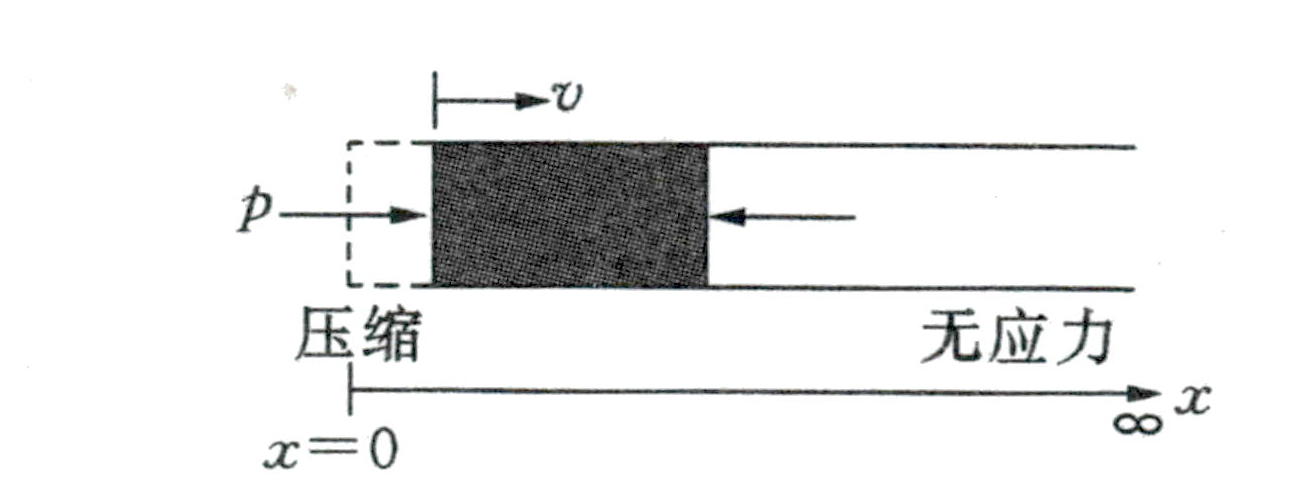
①若棒的左端面以恒定速度$v$运动(见图),在时间$\Delta t$内,棒左端之应变$S$与压强$p$各为何?(答案只能以$\rho$,$u$,$v$表示.)
②考虑棒内沿$x$方向行进的纵波.以$x$表示棒内一横截面无应力下的平衡位置(见图),以$\xi (x,t)$表示此横截面在时刻$t$的位移,并设
$\xi (x,t)= \xi _{0} \sin k(x-ut)$(3)
式中$\xi_{0}$及$k$为常量,试求出速度$v(x,t)$、应变$S(x,t)$及压强$p(x,t)$随$x$与$t$变化函数.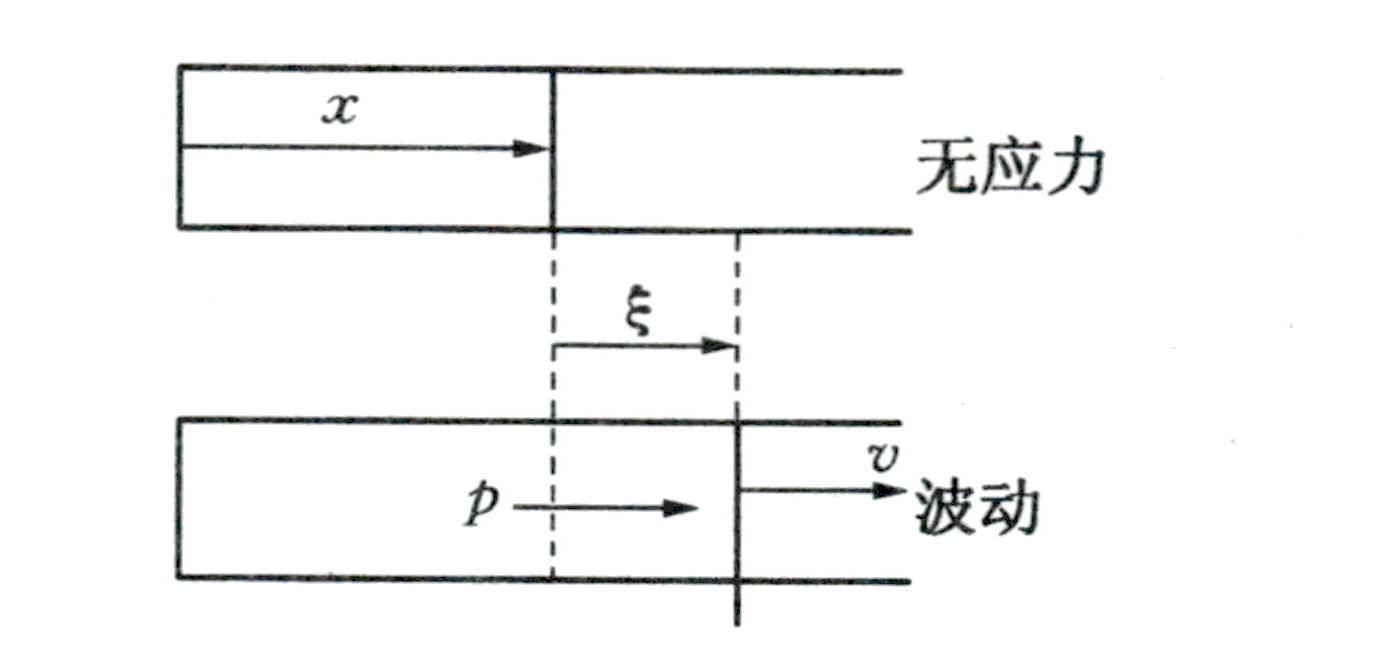
(2)B部分 机电性质(包括压电效应)
考虑一块长度为$b$、宽度为$w$、厚度为$h$的均匀石英晶片(见图4),其长度沿$x$轴,厚度沿$z$轴,晶片的上、下表面各镀有一层金属薄膜作为电极,焊接在电极中心点的两条弓|线兼作为支柱(见图5).对沿$x$轴的纵向振动而言,这两个电极中心点可视为固定不动.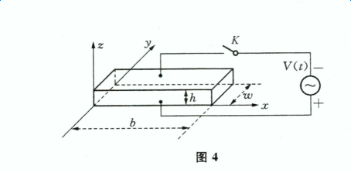
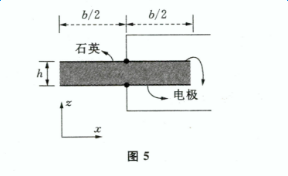
此石英晶体的密度$\rho$为$2.65\times 10^{3}\ {kg/m^{3}}$,杨氏模量$Y$为$7.87\times 10^{10}\ {N/m^{2}}$,晶片的长度$b$为${1.00}{cm}$,而宽度$w$与厚度$h$则满足$w \ll b$与$h\ll w$.当开关$K$未闭合时,石英晶片中只激发起沿$x$轴方向的纵向模式的驻波振动.
对于频率为$f= \omega /2 \pi$的驻波,平衡位置位于$x$处的截面,在时刻$t$,其位移$\xi (x,t)$可以表示为
$\xi (x,t)=2 \xi _{0}g(x) \cos \omega t(0 \leqslant x \leqslant b)$(4a)
式中$\xi _{0}$为正常量,而位置函数$g(x)$可表示为下列形式:
$g(x)=B_{1} \sin k\left(x-\dfrac{b}{2}\right)+B_{2} \cos k\left(x-\dfrac{b}{2}\right)$(4b)
$g(x)$的最大值为$1$,式中$k= \omega /u$.请记住电极的中心是静止的,而晶片的左、右端面是自由的,因而应力(或压强)为零.
①就此石英晶片的纵驻波,确定方程(4b)中的$B_{1}$和$B_{2}$值.
②此石英晶片中激发的纵驻波的两个最低频率为何?
压电效应是石英晶体的一种特性.晶体被压缩或拉伸时,其两端会产生电压;反之,若在晶体两端施加电压,则依据电压的极性,晶体会伸张或收缩.因而,机械振动和电振动会通过石英晶体互相耦合并引起共振.
为说明压电效应,设当石英晶片中存在沿$z$方向的电场$E$时,其上、下电极的电荷面密度分别为$+ \sigma$与$- \sigma$.分别以$S$与$T$表示晶片沿$x$方向的应变与应力,则此石英晶片的压电效应,可用下列一组关系式表示:
$S=\dfrac{1}{Y}T+\text{d}_{P}E$(5a)
$\sigma =\text{d}_{p}T+ \varepsilon _{T}E$(5b)
其中$1/Y=1.27\times 10^{-11}\ {m^{2}/N}$为定电场下的弹性顺度(即杨氏模量$Y$的倒数),$\varepsilon _{T}=4.06\times 10^{-11}\ {F/m}$为定应力下的电容率,$\text{d}_{p}=2.25\times 10^{-12}\ {m/V}$则为压电常量.
将图$4$中的开关$K$接通,则两电极间加有交变电压$V(t)=v_{\text{m}} \cos \omega t$,从而在晶片中存在一均匀电场$E(t)=V(t)/h$.最后会达到稳定态,晶片中出现沿$x$方向、角频率为$\omega$的纵驻波振荡.
当电场$E$均匀时,纵驻波的波长$\lambda$与频率$f$的关系仍满足$\lambda =u/f$,其中$u$由(2)式给定.但是正如(5a)式所示,$T=YS$不再成立,尽管应力与应变的定义保持不变,且晶片两端面保持自由而无应力.
③考虑方程(5a)和(5b),下电极板上的电荷面密度$\sigma$随$x$与$t$变化的函数为
$\sigma (x,t)=\left \lbrack D_{1} \cos k\left(x-\dfrac{b}{2}\right)+D_{2}\right \rbrack\dfrac{V(t)}{h}$
式中$k= \omega /u$.求$D_{1}$,$D_{2}$的表示式.
④下电极上的总电荷$Q(t)$与电压$V(t)$的关系为
$Q(t)=\left \lbrack 1+ \alpha ^{2}\left (\dfrac{2}{kb}\tan \dfrac{kb}{2}-1 \right )\right \rbrack C_{0}V(t) $(6)
试求出常数$C_{0}$的表示式与$\alpha ^{2}$的表示式及其数值.
题目解答
答案
(1)
①参见图6,棒的左端面移动距离$v \Delta t$,同时压力波传播距离$u \Delta t$,$u=\sqrt{Y/ \rho }$,于是左端面处应变为
$S=\dfrac{ \Delta l}{l}=\dfrac{-v \Delta t}{u \Delta t}=-\dfrac{v}{u}$(A1a)*
根据胡克定律,左端面处的压强
$p=-YS=Y\dfrac{u}{v}=\rho uv$(A1b)*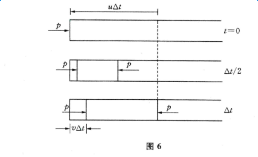

②速度$v$与作角频率$\omega =ku$的简谐运动的位移$\xi$相联系(位移$\xi$也可看作匀速圆运动的投影,如图7所示).于是,若$\xi (x,t)= \xi _{0} \sin k(x-ut)$,则
$v(x,t)=-ku \xi _{0} \cos k(x-ut)$ (A2)*
应变和压强与速度的关系同问题(a),因而
$S(x,t)=-v(x,t)/u=k \xi _{0} \cos k(x-ut)$(A3)*
$p(x,t)= \rho uv(x,t)=-k \rho u^{2} \xi _{0} \cos k(x-ut)=-YS(x,t)=-kY \xi _{0} \cos k(x-ut)$(A4)*
或者,答案也可用微分得到
$v(x,t)=\dfrac{d \xi }{dt}=-ku \xi _{0} \cos k(x-ut)$
$S(x,t)=\dfrac{\text{d}\xi}{\text{d}x}=k \xi _{0} \cos k(x-ut)$
$p(x,t)=-Y\dfrac{d \xi }{dx}=-kY \xi _{0} \cos k(x-ut)$
(2)
①既然角频率$\omega$和传播速度$u$已知,波长就可由$\lambda =2 \pi /k$得到,其中$k= \omega /u$.由题意可知,位移随位置的变化函数用下式描写:
$g(x)=B_{1} \sin k\left(x-\dfrac{b}{2}\right)+B_{2} \cos k\left(x-\dfrac{b}{2}\right)$(B1)
既然电极中心已假定固定不动,则$g\left(\dfrac{b}{2}\right)=0$,这即导致$B_{2}=0$.已知$g(x)$的极大值为$1$,可得$B_{1}= \pm 1$,得
$g(x)= \pm \sin \dfrac{w}{x}\left(x-\dfrac{b}{2}\right)$(B2)*
于是位移
$\xi (x,t)= \pm 2 \xi _{0} \sin \dfrac{w}{u} \left(x-\dfrac{b}{2}\right) \cos \omega t$(B3)
②既然压强$p$(或应力$T$)在晶片的两端面处(即$x=0$和$x=b$处)为$0$,本题的答案可用类比法从长度为$b$的两端开放的管子中的声驻波频率得到.但由于电极的中心固定不动,所有基音的偶次谐频必须剔除,因为它们在晶片的中心截面处为位移的波腹,而不是波节.
既然对基音有波长$\lambda =2b$,则基频由$f_{1}=u/(2b)$给出.波的传播速率$u$由下式给出:
$u=\sqrt{\dfrac{Y}{ \rho }}=\sqrt{\dfrac{7.87\times 10^{10}}{2.65\times 10^{3}}}=5.45\times 10^{3}({m/s})$(B4)
已知$b=1.00\times 10^{-2}\ {m}$,因而两最低驻波频率为
$f_{1}=\dfrac{u}{2b}=273({kHz})$,$f_{3}=3f_{1}=\dfrac{3u}{2b}=818({kHz})$(B5)*
(c)和(d)两题的另一种解法如下:
晶片中的纵驻波在$x=b/2$处为位移波节,该驻波可看成两反向行进的波的合成.于是,其位移和速度应有如下形式:
$\xi (x,t)=2 \xi _{\text{m}} \sin k\left(x-\dfrac{b}{2}\right) \cos \omega t= \xi _{\text{m}}\left \lbrack \sin k\left(x-\dfrac{b}{2}-ut\right)+ \sin k\left(x-\dfrac{b}{2}+ut\right)\right \rbrack$(B6)
$v(x,t)=-ku \xi _{\text{m}}\left \lbrack \cos k\left(x-\dfrac{b}{2}-ut\right)- \cos k\left(x-\dfrac{b}{2}+ut\right)\right \rbrack=-2 \omega \xi _{\text{m}} \sin k\left(x-\dfrac{b}{2}\right) \sin \omega t$(B7)
式中$\omega =ku$,方括号中第一项和第二项分别表示沿$+x$方向和沿$-x$方向行进的波.注意:若令$\xi _{\text{m}}= \pm \xi _{0}$,则(B6)式与(B3)式相同.
对于沿$-x$方向行进的波,(A1a)和(A1b)式中的速度$v$应用$-v$代入,于是有
$S=\dfrac{-v}{u}$和$p= \rho uv$(沿$+x$方向行进的波)(B8)
$S=\dfrac{v}{u}$和$p=- \rho uv$(沿$-x$方向行进的波)(B9)
(b)小题中的应变和压强即为
$S(x,t)=-k \xi _{\text{m}}\left(- \cos k\left(x-\dfrac{b}{2}-ut\right)- \cos k\left(x-\dfrac{b}{2}+ut\right)\right \rbrack=2k \xi _{m} \cos k\left(x-\dfrac{b}{2}\right) \cos \omega t$(B10)
$p(x,t)=- \rho u \omega \xi _{\text{m}}\left \lbrack \cos k\left(x-\dfrac{b}{2}-ut\right)+ \cos k\left(x-\dfrac{b}{2}+ut\right)\right \rbrack=-2 \rho u \omega \xi _{\text{m}} \cos k\left(x-\dfrac{b}{2}\right) \cos \omega t$(B11)
注意:$v$,$S$和$p$也可像(b)小题那样,由对$\xi$求导得到.
由于晶片在两端面($x=0$和$x=b$)处是自由的,因而在任何时刻两端面处的应力或压强应为$0$.
由(B11)式,这必导致$\cos (kb/2)=0$或
$kb=\dfrac{w}{u}b=\dfrac{2 \pi f}{ \lambda f}b=n \pi$$(n=1,3,5,\cdots)$(B12)
用波长$\lambda$表示,(B12)式可写成
$\lambda =\dfrac{2b}{n}$$(n=1,3,5,\cdots)$(B13)
频率则为
$f=\dfrac{u}{ \lambda }=\dfrac{nu}{2b}=\dfrac{n}{2b}\sqrt{\dfrac{Y}{ \rho }}$$(n=1,3,5, \cdots )$
(B14)
此结果与(B4)和(B5)式给出的结果相同.
③由题目中(5a)和(5b)式,压电效应导致下列方程:
$T=Y\left(S-d_{p}E\right)$(B15)
$\sigma =Yd_{p}S+ \varepsilon_{ T}\left(1-Y\dfrac{d^{2}_{p}}{ \varepsilon _{T}}\right)E$(B16)
由于对晶片中任意纵驻波,$x=b/2$处均为位移波节,位移$\xi$和应变$S$必具有(B6)和(B10)式的形式,
$\xi (x,t)= \xi _{\text{m}} \sin k\left(x-\dfrac{b}{2}\right) \cos \left( \omega t+ \varphi \right)$(B17)
$S(x,t)=k \xi _{\text{m}} \cos k\left(x-\dfrac{b}{2}\right) \cos \left( \omega t+ \varphi \right)$(B18)
现在两式中在时间相关因子中加了一个相位常数$\varphi$.
已假定电极间电场均匀而仅依赖于时间,
$E(x,t)=\dfrac{V(t)}{h}=\dfrac{V_{\text{m}} \cos \omega t}{h}$(B19)
将(B18)和(B19)式代入(B15)式,得
$T=Y\left \lbrack k \xi _{\text{m}} \cos k\left(x-\dfrac{b}{2}\right) \cos \left( \omega t+ \varphi \right)-\dfrac{d_{p}}{h}V_{\text{m}} \cos \omega t\right \rbrack$(B20)
由于晶片两端面($x=0$和$x=b$)自由,任何时刻两端面处的应力$T$应为$0$,这必导致$\varphi =0$及
$k \xi _{\text{m}} \cos \dfrac{kb}{2}=d_{p}\dfrac{V_{\text{m}}}{h}$(B21)
既然$\varphi =0$,由(B16),(B18)和(B19)式可知电荷面密度也具有同样的时间依赖关系,并可表示为
$\sigma (x,t)= \sigma (x) \cos \omega t$(B22)
与$x$有关的因子$\sigma (x)$可表示为
$\sigma (x)=Yd_{p}k \xi _{m}\cos k\left(x-\dfrac{b}{2}\right)+ \varepsilon _{T}\left(1-Y\dfrac{d^{2}_{p}}{ \varepsilon _{T}}\right)\dfrac{V_{\text{m}}}{h}$
$=[Y\dfrac{d^{2}_{p}}{ \cos \dfrac{kb}{2}}\cos k\left(x-\dfrac{b}{2}\right)+ \varepsilon _{T}\left(1-Y\dfrac{d^{2}_{p}}{ \varepsilon _{T}}\right)]\dfrac{V_{\text{m}}}{h}$(B23)*
④在时刻$t$,下电极上的总面电荷$Q(t)$可由(B22)式中的$\sigma (x,t)$对电极表面积分得到.结果为
$\dfrac{Q(t)}{V(t)}=\dfrac{1}{V(t)} \int ^{b}_{0} \sigma (x,t)w\text{d}x=\dfrac{1}{V_{\text{m}}}\int ^{b}_{0} \sigma (x)w\text{d}x=\dfrac{w}{h} \int ^{b}_{0}\left \lbrack Y\dfrac{d^{2}_{p}}{ \cos \dfrac{kb}{2}}\cos k\left(x-\dfrac{b}{2}\right)+ \varepsilon _{T}\left(1-Y\dfrac{d^{2}_{p}}{ \varepsilon _{T}}\right)\right \rbrack\text{d}x$
$=\left( \varepsilon _{T}\dfrac{bw}{h}\right)\left \lbrack Y\dfrac{d^{2}_{p}}{ \varepsilon _{T}}\left(\dfrac{2}{kb}\tan \dfrac{kb}{2}\right )+\left(1-Y\dfrac{d^{2}_{p}}{ \varepsilon _{T}}\right) \right \rbrack=C_{0}\left \lbrack \alpha ^{2}\left(\dfrac{2}{kb}\tan \dfrac{kb}{2}\right)+\left(1- \alpha ^{2}\right)\right \rbrack$
式中$C_{0}= \varepsilon _{T}\dfrac{bw}{h}$,
$\alpha ^{2}=Y\dfrac{d^{2}_{p}}{ \varepsilon _{T}}=\dfrac{(2.25\times 10^{-12})^{2}}{1.27\times 10^{-11}\times 4.06\times 10^{-11}}=9.82\times 10^{-3}$(B25)*
常数$\alpha$称为机电耦合系数.