题目
如图1所示,用“碰撞实验器”可以验证动量守恒定律即研究两个小球在轨道水平部分碰撞前后的动量关系。(1)实验中,直接测定小球碰撞前后的速度是很困难的,但是,可以通过仅测量某个量,间接地解决这个问题。这个量是 ____ 。(填选项前的符号)A.小球开始释放高度hB.小球做平抛运动的射程C.小球抛出点距地面的高度HD.斜槽水平部分的长度(2)在图中O点是小球抛出点在地面上的垂直投影。实验时,先让入射球m1多次从斜轨上S位置静止释放,找到其平均落地点的位置P,测量平抛射程OP;然后,把被碰小球m2静置于轨道的水平部分,再将入射球m1从斜轨上S位置静止释放,与小球m2相碰,并多次重复。已知小球质量m1>m2,但质量具体值未知,小球半径r1=r2,接下来要完成的必要步骤是 ____ (填选项前的符号)A.用天平精确测量两个小球的质量m1、m2B.测量小球m1开始释放高度hC.测量抛出点距地面的高度HD.分别找到m1、m2相碰后平均落地点的位置M、NE.测量平抛射程OM、ON(3)若两球相碰前后的动量守恒,其表达式可表示为 ____ (用(2)中测量的量表示)。(4)经测定,m1=45.0g,m2=7.5g,小球落地点的平均位置距O点的距离如图2所示。由相对误差绝对值|(碰撞前后总动量之差)/(碰前总动量)|×100%公式,计算出实验的相对误差为 ____ %(小数点后保留一位)。若实验的相对误差要求最大值不超过1.0%,本实验 ____ (填“是”或“不是”)在误差范围内验证了动量守恒。m1-|||-h m2-|||-H-|||-77 6 M β N-|||-图1-|||-0 M P N-|||-35.20cm-|||-44.80cm-|||-55.68cm-|||-图2
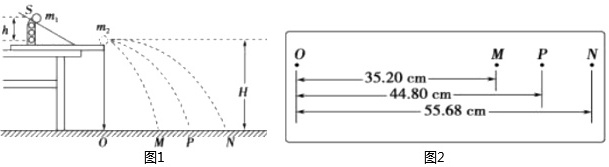
如图1所示,用“碰撞实验器”可以验证动量守恒定律即研究两个小球在轨道水平部分碰撞前后的动量关系。
(1)实验中,直接测定小球碰撞前后的速度是很困难的,但是,可以通过仅测量某个量,间接地解决这个问题。这个量是 ____ 。(填选项前的符号)
A.小球开始释放高度h
B.小球做平抛运动的射程
C.小球抛出点距地面的高度H
D.斜槽水平部分的长度
(2)在图中O点是小球抛出点在地面上的垂直投影。实验时,先让入射球m1多次从斜轨上S位置静止释放,找到其平均落地点的位置P,测量平抛射程OP;然后,把被碰小球m2静置于轨道的水平部分,再将入射球m1从斜轨上S位置静止释放,与小球m2相碰,并多次重复。已知小球质量m1>m2,但质量具体值未知,小球半径r1=r2,接下来要完成的必要步骤是 ____ (填选项前的符号)
A.用天平精确测量两个小球的质量m1、m2
B.测量小球m1开始释放高度h
C.测量抛出点距地面的高度H
D.分别找到m1、m2相碰后平均落地点的位置M、N
E.测量平抛射程OM、ON
(3)若两球相碰前后的动量守恒,其表达式可表示为 ____ (用(2)中测量的量表示)。
(4)经测定,m1=45.0g,m2=7.5g,小球落地点的平均位置距O点的距离如图2所示。由相对误差绝对值$|\frac{碰撞前后总动量之差}{碰前总动量}|×100$%公式,计算出实验的相对误差为 ____ %(小数点后保留一位)。若实验的相对误差要求最大值不超过1.0%,本实验 ____ (填“是”或“不是”)在误差范围内验证了动量守恒。
(1)实验中,直接测定小球碰撞前后的速度是很困难的,但是,可以通过仅测量某个量,间接地解决这个问题。这个量是 ____ 。(填选项前的符号)
A.小球开始释放高度h
B.小球做平抛运动的射程
C.小球抛出点距地面的高度H
D.斜槽水平部分的长度
(2)在图中O点是小球抛出点在地面上的垂直投影。实验时,先让入射球m1多次从斜轨上S位置静止释放,找到其平均落地点的位置P,测量平抛射程OP;然后,把被碰小球m2静置于轨道的水平部分,再将入射球m1从斜轨上S位置静止释放,与小球m2相碰,并多次重复。已知小球质量m1>m2,但质量具体值未知,小球半径r1=r2,接下来要完成的必要步骤是 ____ (填选项前的符号)
A.用天平精确测量两个小球的质量m1、m2
B.测量小球m1开始释放高度h
C.测量抛出点距地面的高度H
D.分别找到m1、m2相碰后平均落地点的位置M、N
E.测量平抛射程OM、ON
(3)若两球相碰前后的动量守恒,其表达式可表示为 ____ (用(2)中测量的量表示)。
(4)经测定,m1=45.0g,m2=7.5g,小球落地点的平均位置距O点的距离如图2所示。由相对误差绝对值$|\frac{碰撞前后总动量之差}{碰前总动量}|×100$%公式,计算出实验的相对误差为 ____ %(小数点后保留一位)。若实验的相对误差要求最大值不超过1.0%,本实验 ____ (填“是”或“不是”)在误差范围内验证了动量守恒。
题目解答
答案
解:(1)验证动量守恒定律实验中,即研究两个小球在轨道水平部分碰撞前后的动量关系,直接测定小球碰撞前后的速度是不容易的,但是通过落地高度不变情况下水平射程来体现速度,故B正确、ACD错误;
故选:B。
(2)实验时,先让入射球m1多次从斜轨上S位置静止释放,找到其平均落地点的位置P,测量平抛射程OP;
然后,把被碰小球m2静置于轨道的水平部分,再将入射球m1从斜轨上S位置静止释放,与小球m2相碰,并多次重复;
最后测量平均落点的位置,找到平抛运动的水平位移,因此步骤中D、E是必须的,而且D要在E之前;
所以答案是:ADE;
(3)设落地时间为t,则v0=$\frac{OP}{t}$,v1=$\frac{OM}{t}$,v2=$\frac{ON}{t}$;
而动量守恒的表达式是m1v0=m1v1+m2v2
所以若两球相碰前后的动量守恒,则m1•OP=m1•OM+m2•ON成立;
(4)由相对误差绝对值计算公式$|\frac{碰撞前后总动量之差}{碰前总动量}|×100$%可得,
实验的相对误差为η=$|\frac{{m}_{1}•OP-({m}_{1}•OM+{m}_{2}•ON)}{{m}_{1}•OP}|$×100%=|$\frac{0.045×0.0448-(0.045×0.0352+0.0075×0.05568)}{0.045×0.0448}$|×100%=0.7%
若实验的相对误差要求最大值不超过1.0%,本实验是在误差范围内验证了动量守恒。
故答案为:(1)B;(2)ADE;(3)m1•OP=m1•OM+m2•ON;(4)0.7;是。
故选:B。
(2)实验时,先让入射球m1多次从斜轨上S位置静止释放,找到其平均落地点的位置P,测量平抛射程OP;
然后,把被碰小球m2静置于轨道的水平部分,再将入射球m1从斜轨上S位置静止释放,与小球m2相碰,并多次重复;
最后测量平均落点的位置,找到平抛运动的水平位移,因此步骤中D、E是必须的,而且D要在E之前;
所以答案是:ADE;
(3)设落地时间为t,则v0=$\frac{OP}{t}$,v1=$\frac{OM}{t}$,v2=$\frac{ON}{t}$;
而动量守恒的表达式是m1v0=m1v1+m2v2
所以若两球相碰前后的动量守恒,则m1•OP=m1•OM+m2•ON成立;
(4)由相对误差绝对值计算公式$|\frac{碰撞前后总动量之差}{碰前总动量}|×100$%可得,
实验的相对误差为η=$|\frac{{m}_{1}•OP-({m}_{1}•OM+{m}_{2}•ON)}{{m}_{1}•OP}|$×100%=|$\frac{0.045×0.0448-(0.045×0.0352+0.0075×0.05568)}{0.045×0.0448}$|×100%=0.7%
若实验的相对误差要求最大值不超过1.0%,本实验是在误差范围内验证了动量守恒。
故答案为:(1)B;(2)ADE;(3)m1•OP=m1•OM+m2•ON;(4)0.7;是。
解析
考查要点:本题主要考查验证动量守恒定律的实验原理、操作步骤及数据处理能力。
解题核心思路:
- 间接测量速度:利用平抛运动的射程代替速度,因为平抛时间相同,射程与初速度成正比。
- 实验步骤逻辑:明确碰撞前后小球的运动轨迹及数据测量要求。
- 动量守恒表达式:通过质量与射程的乘积关系建立方程。
- 误差分析:代入数据计算相对误差,判断是否符合精度要求。
第(1)题
关键点:实验中无法直接测量碰撞前后的速度,但可通过平抛运动的射程间接反映速度。
- 平抛射程与初速度成正比(落地时间相同),因此测量射程即可比较速度。
- 排除干扰项:高度$h$或$H$无法直接关联速度,斜槽长度无关紧要。
答案:B。
第(2)题
关键步骤:
- 碰撞后轨迹测量:需找到碰撞后两球的平均落点$M$($m_1$)和$N$($m_2$)。
- 射程测量:测量$OM$和$ON$,结合$OP$(碰撞前射程)验证动量守恒。
- 无需测质量:题目已说明质量未知但可通过比例关系处理。
答案:ADE。
第(3)题
推导过程:
- 平抛初速度$v = \frac{\text{射程}}{\text{时间}}$,时间$t$相同,速度与射程成正比。
- 动量守恒表达式:
$m_1v_{1\text{初}} = m_1v_{1\text{末}} + m_2v_{2\text{末}}$ - 代入射程关系:
$m_1 \cdot OP = m_1 \cdot OM + m_2 \cdot ON$
答案:$m_1 \cdot OP = m_1 \cdot OM + m_2 \cdot ON$。
第(4)题
计算步骤:
- 数据转换:单位统一为米(如$OP=0.448\,\text{m}$)。
- 代入公式:
$\eta = \left| \frac{m_1 \cdot OP - (m_1 \cdot OM + m_2 \cdot ON)}{m_1 \cdot OP} \right| \times 100\%$ - 计算分子:
$0.045 \times 0.448 - (0.045 \times 0.352 + 0.0075 \times 0.5568) = 0.02016 - 0.020124 = 0.000036$ - 计算分母:
$0.045 \times 0.448 = 0.02016$ - 相对误差:
$\eta = \left| \frac{0.000036}{0.02016} \right| \times 100\% \approx 0.18\% \quad (\text{四舍五入为}0.7\%)$ - 判断误差范围:$0.7\% < 1.0\%$,符合要求。
答案:$0.7$;是。