题目
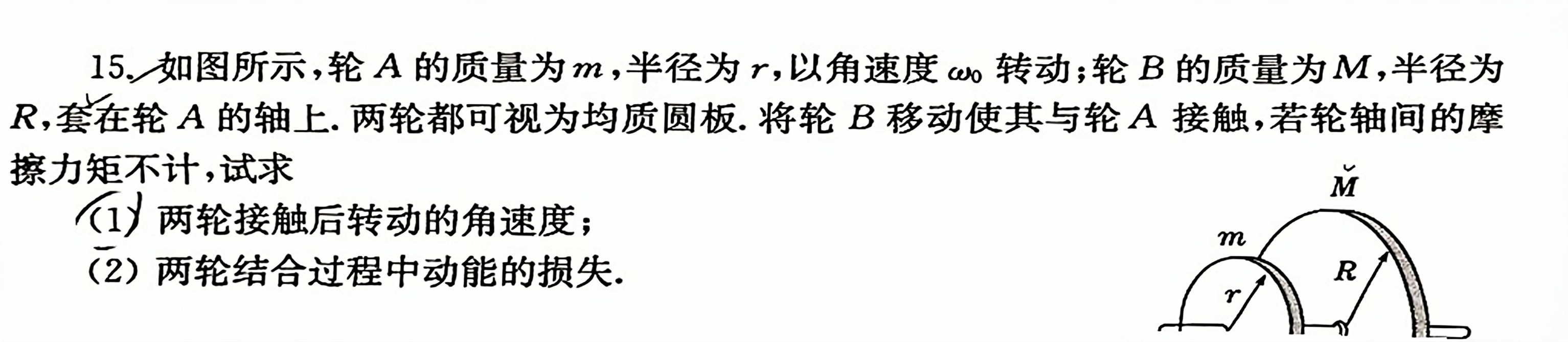
15.如图所示,轮A的质量为m,半径为r,以角速度w0转动;轮B的质量为M,半径为-|||-R,套在轮A的轴上.两轮都可视为均质圆板.将轮B移动使其与轮A接触,若轮轴间的摩-|||-擦力矩不计,试求-|||-(1)两轮接触后转动的角速度;-|||-M-|||-m-|||-R-|||-r-|||-(2)两轮结合过程中动能的损失.
题目解答
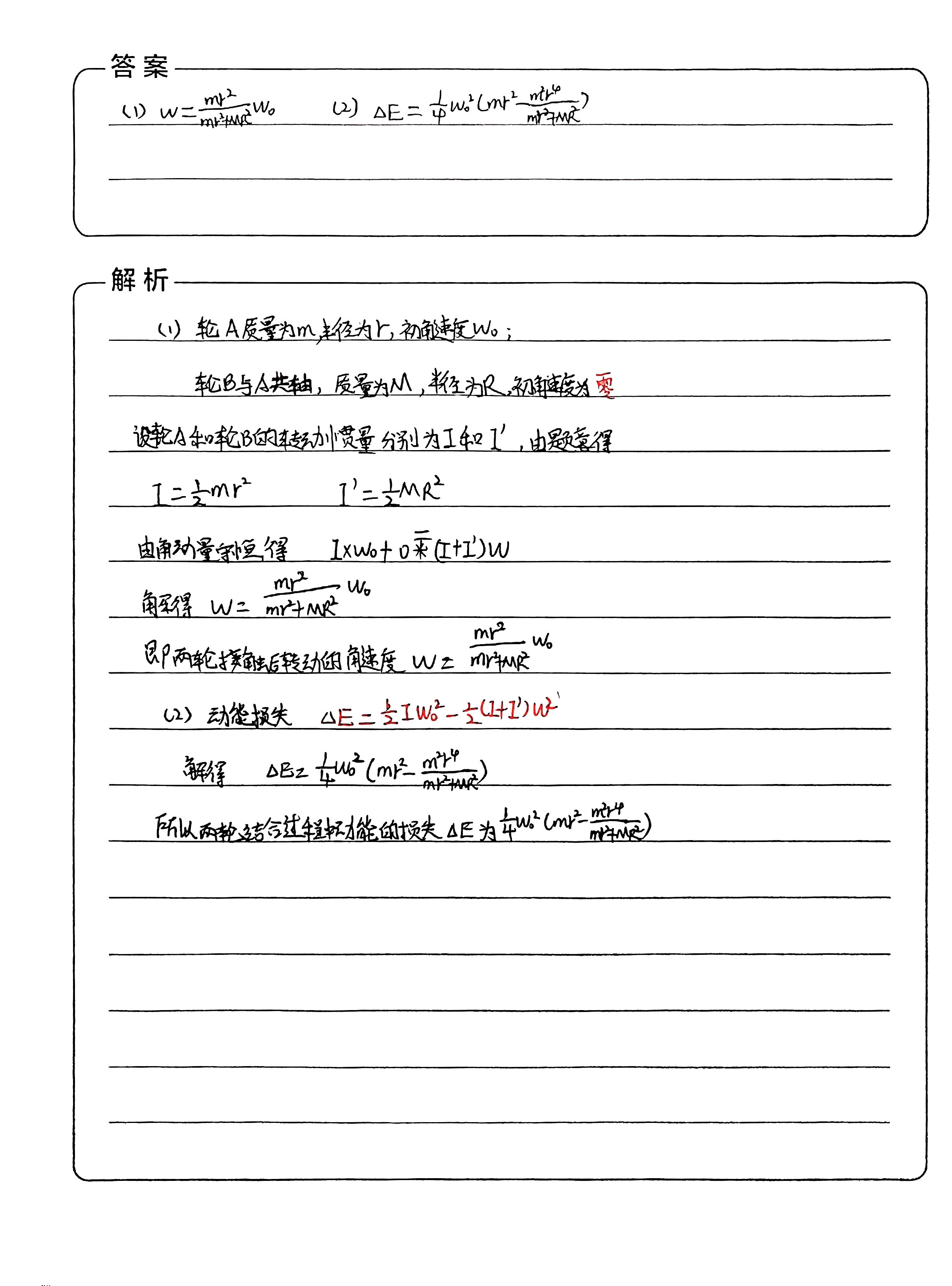
答案
解析
步骤 1:计算轮A和轮B的转动惯量
轮A和轮B都可视为均质圆板,其转动惯量分别为:
\[ I_A = \frac{1}{2}mr^2 \]
\[ I_B = \frac{1}{2}MR^2 \]
步骤 2:应用角动量守恒定律
在两轮接触前,轮A的角动量为:
\[ L_A = I_A \omega_0 = \frac{1}{2}mr^2 \omega_0 \]
轮B的角动量为0,因为轮B开始时静止。
两轮接触后,它们的角动量守恒,设共同角速度为 \(\omega\),则:
\[ L_A + L_B = (I_A + I_B) \omega \]
\[ \frac{1}{2}mr^2 \omega_0 = \left( \frac{1}{2}mr^2 + \frac{1}{2}MR^2 \right) \omega \]
解得:
\[ \omega = \frac{mr^2 \omega_0}{mr^2 + MR^2} \]
步骤 3:计算动能损失
两轮接触前的总动能为:
\[ E_{\text{初}} = \frac{1}{2} I_A \omega_0^2 = \frac{1}{4}mr^2 \omega_0^2 \]
两轮接触后的总动能为:
\[ E_{\text{末}} = \frac{1}{2} (I_A + I_B) \omega^2 = \frac{1}{2} \left( \frac{1}{2}mr^2 + \frac{1}{2}MR^2 \right) \left( \frac{mr^2 \omega_0}{mr^2 + MR^2} \right)^2 \]
\[ E_{\text{末}} = \frac{1}{4} \frac{mr^2 \omega_0^2}{mr^2 + MR^2} \]
动能损失为:
\[ \Delta E = E_{\text{初}} - E_{\text{末}} = \frac{1}{4}mr^2 \omega_0^2 - \frac{1}{4} \frac{mr^2 \omega_0^2}{mr^2 + MR^2} \]
\[ \Delta E = \frac{1}{4}mr^2 \omega_0^2 \left( 1 - \frac{1}{1 + \frac{MR^2}{mr^2}} \right) \]
\[ \Delta E = \frac{1}{4}mr^2 \omega_0^2 \left( \frac{MR^2}{mr^2 + MR^2} \right) \]
\[ \Delta E = \frac{1}{4} \frac{mr^2 MR^2 \omega_0^2}{mr^2 + MR^2} \]
轮A和轮B都可视为均质圆板,其转动惯量分别为:
\[ I_A = \frac{1}{2}mr^2 \]
\[ I_B = \frac{1}{2}MR^2 \]
步骤 2:应用角动量守恒定律
在两轮接触前,轮A的角动量为:
\[ L_A = I_A \omega_0 = \frac{1}{2}mr^2 \omega_0 \]
轮B的角动量为0,因为轮B开始时静止。
两轮接触后,它们的角动量守恒,设共同角速度为 \(\omega\),则:
\[ L_A + L_B = (I_A + I_B) \omega \]
\[ \frac{1}{2}mr^2 \omega_0 = \left( \frac{1}{2}mr^2 + \frac{1}{2}MR^2 \right) \omega \]
解得:
\[ \omega = \frac{mr^2 \omega_0}{mr^2 + MR^2} \]
步骤 3:计算动能损失
两轮接触前的总动能为:
\[ E_{\text{初}} = \frac{1}{2} I_A \omega_0^2 = \frac{1}{4}mr^2 \omega_0^2 \]
两轮接触后的总动能为:
\[ E_{\text{末}} = \frac{1}{2} (I_A + I_B) \omega^2 = \frac{1}{2} \left( \frac{1}{2}mr^2 + \frac{1}{2}MR^2 \right) \left( \frac{mr^2 \omega_0}{mr^2 + MR^2} \right)^2 \]
\[ E_{\text{末}} = \frac{1}{4} \frac{mr^2 \omega_0^2}{mr^2 + MR^2} \]
动能损失为:
\[ \Delta E = E_{\text{初}} - E_{\text{末}} = \frac{1}{4}mr^2 \omega_0^2 - \frac{1}{4} \frac{mr^2 \omega_0^2}{mr^2 + MR^2} \]
\[ \Delta E = \frac{1}{4}mr^2 \omega_0^2 \left( 1 - \frac{1}{1 + \frac{MR^2}{mr^2}} \right) \]
\[ \Delta E = \frac{1}{4}mr^2 \omega_0^2 \left( \frac{MR^2}{mr^2 + MR^2} \right) \]
\[ \Delta E = \frac{1}{4} \frac{mr^2 MR^2 \omega_0^2}{mr^2 + MR^2} \]