题目
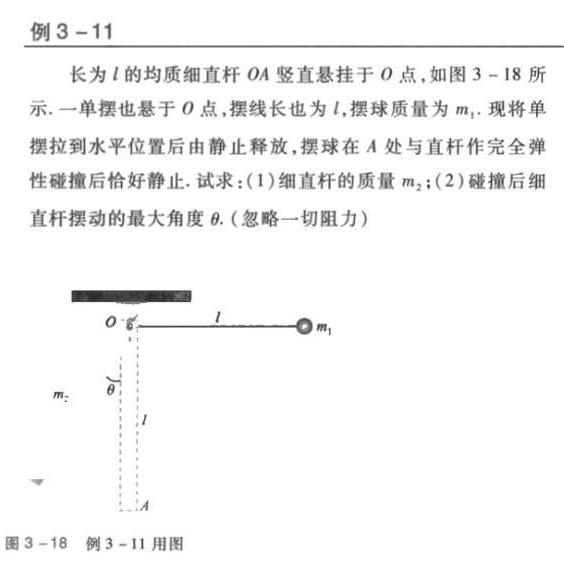
长为l的均质细直杆OA竖直悬挂于0点,如图 3-18 所-|||-示.一单摆也悬于0点,摆线长也为l,摆球质量为m1.现将单-|||-摆拉到水平位置后由静止释放,摆球在A处与直杆作完全弹-|||-性碰撞后恰好静止.试求:(1)细直杆的质量m2;(2)碰撞后细-|||-直杆摆动的最大角度 θ.(忽略一切阻力)-|||-0· m1-|||-m:-|||-1-|||-A-|||-3-18 例3-11 用图
题目解答
答案

解析
步骤 1:确定碰撞前单摆的角速度
单摆从水平位置释放,摆球在最低点时速度最大,此时摆球的动能最大,势能最小。根据机械能守恒定律,摆球在最低点的动能等于摆球在水平位置的势能。摆球的势能为 $m_1gl$,动能为 $\frac{1}{2}m_1v_1^2$,其中 $v_1$ 是摆球在最低点的速度。因此,有:
$$
m_1gl = \frac{1}{2}m_1v_1^2
$$
解得:
$$
v_1 = \sqrt{2gl}
$$
摆球的角速度 $\omega_1$ 为:
$$
\omega_1 = \frac{v_1}{l} = \sqrt{\frac{2g}{l}}
$$
步骤 2:确定碰撞后细直杆的角速度
由于碰撞是完全弹性碰撞,系统的角动量守恒,有:
$$
I_1\omega_1 = I_2\omega_2
$$
其中 $I_1$ 和 $I_2$ 分别为摆球和细直杆对转轴O的转动惯量,$\omega_2$ 为碰撞后细杆的角速度。摆球的转动惯量为 $I_1 = m_1l^2$,细直杆的转动惯量为 $I_2 = \frac{1}{3}m_2l^2$。因此,有:
$$
m_1l^2\omega_1 = \frac{1}{3}m_2l^2\omega_2
$$
解得:
$$
\omega_2 = 3\omega_1 = 3\sqrt{\frac{2g}{l}}
$$
步骤 3:确定细直杆的质量
由于碰撞是完全弹性碰撞,系统的动能守恒,有:
$$
\frac{1}{2}I_1\omega_1^2 = \frac{1}{2}I_2\omega_2^2
$$
代入 $I_1$ 和 $I_2$ 的表达式,有:
$$
\frac{1}{2}m_1l^2\omega_1^2 = \frac{1}{2}\frac{1}{3}m_2l^2\omega_2^2
$$
解得:
$$
m_2 = 3m_1
$$
步骤 4:确定碰撞后细直杆摆动的最大角度
以摆球、细杆和地球为系统,由于外力做功和非保守内力做功均为零,因此,系统的机械能守恒,有:
$$
m_1gl = m_2g\frac{1}{2}(1-\cos\theta)
$$
解得:
$$
\cos\theta = \frac{1}{3}
$$
$$
\theta = \arccos\frac{1}{3} = 70.5^\circ
$$
单摆从水平位置释放,摆球在最低点时速度最大,此时摆球的动能最大,势能最小。根据机械能守恒定律,摆球在最低点的动能等于摆球在水平位置的势能。摆球的势能为 $m_1gl$,动能为 $\frac{1}{2}m_1v_1^2$,其中 $v_1$ 是摆球在最低点的速度。因此,有:
$$
m_1gl = \frac{1}{2}m_1v_1^2
$$
解得:
$$
v_1 = \sqrt{2gl}
$$
摆球的角速度 $\omega_1$ 为:
$$
\omega_1 = \frac{v_1}{l} = \sqrt{\frac{2g}{l}}
$$
步骤 2:确定碰撞后细直杆的角速度
由于碰撞是完全弹性碰撞,系统的角动量守恒,有:
$$
I_1\omega_1 = I_2\omega_2
$$
其中 $I_1$ 和 $I_2$ 分别为摆球和细直杆对转轴O的转动惯量,$\omega_2$ 为碰撞后细杆的角速度。摆球的转动惯量为 $I_1 = m_1l^2$,细直杆的转动惯量为 $I_2 = \frac{1}{3}m_2l^2$。因此,有:
$$
m_1l^2\omega_1 = \frac{1}{3}m_2l^2\omega_2
$$
解得:
$$
\omega_2 = 3\omega_1 = 3\sqrt{\frac{2g}{l}}
$$
步骤 3:确定细直杆的质量
由于碰撞是完全弹性碰撞,系统的动能守恒,有:
$$
\frac{1}{2}I_1\omega_1^2 = \frac{1}{2}I_2\omega_2^2
$$
代入 $I_1$ 和 $I_2$ 的表达式,有:
$$
\frac{1}{2}m_1l^2\omega_1^2 = \frac{1}{2}\frac{1}{3}m_2l^2\omega_2^2
$$
解得:
$$
m_2 = 3m_1
$$
步骤 4:确定碰撞后细直杆摆动的最大角度
以摆球、细杆和地球为系统,由于外力做功和非保守内力做功均为零,因此,系统的机械能守恒,有:
$$
m_1gl = m_2g\frac{1}{2}(1-\cos\theta)
$$
解得:
$$
\cos\theta = \frac{1}{3}
$$
$$
\theta = \arccos\frac{1}{3} = 70.5^\circ
$$