《水浒传》中三位女将是谁 ? 她们的绰号是什么?①扈三娘、一丈青 ②孙二娘、母夜叉 ③顾大嫂、母大虫解 (1) 将与比较后可得:振幅A =0.10m,角频率,初相=0.25,则周期,频率.(2)时的位移、速度、加速度分别为5-6 一远洋货轮,质量为m,浮在水面时其水平截面积为S.设在水面附近货轮的水平截面积近似相等,水的密度为ρ,且不计水的粘滞阻力,证明货轮在水中作振幅较小的竖直自由运动是简谐运动,并求振动周期.分析 要证明货轮作简谐运动,需要分析货轮在平衡位置附近上下运动时,它所受的合外力与位移间的关系,如果满足,则货轮作简谐运动.通过即可求得振动周期.证 货轮处于平衡状态时[图(a)],浮力大小为F =mg.当船上下作微小振动时,取货轮处于力平衡时的质心位置为坐标原点O,竖直向下为x 轴正向,如图(b)所示.则当货轮向下偏移x 位移时,受合外力为其中为此时货轮所受浮力,其方向向上,大小为题5-6 图则货轮所受合外力为式中是一常数.这表明货轮在其平衡位置上下所作的微小振动是简谐运动.由可得货轮运动的微分方程为令,可得其振动周期为5-7 如图(a)所示,两个轻弹簧的劲度系数分别为、 .当物体在光滑斜面上振动时.(1) 证明其运动仍是简谐运动;(2) 求系统的振动频率.题5-7 图分析 从上两题的求解知道,要证明一个系统作简谐运动,首先要分析受力情况,然后看是否满足简谐运动的受力特征(或简谐运动微分方程).为此,建立如图(b)所示的坐标.设系统平衡时物体所在位置为坐标原点O,Ox 轴正向沿斜面向下,由受力分析可知,沿Ox 轴,物体受弹性力及重力分力的作用,其中弹性力是变力.利用串联时各弹簧受力相等,分析物体在任一位置时受力与位移的关系,即可证得物体作简谐运动,并可求出频率.证 设物体平衡时两弹簧伸长分别为、,则由物体受力平衡,有 (1)按图(b)所取坐标,物体沿x 轴移动位移x时,两弹簧又分别被拉伸和,即.则物体受力为 (2)将式(1)代入式(2)得 (3)由式(3)得、,而,则得到式中为常数,则物体作简谐运动,振动频率讨论 (1) 由本题的求证可知,斜面倾角θ 对弹簧是否作简谐运动以及振动的频率均不产生影响.事实上,无论弹簧水平放置、斜置还是竖直悬挂,物体均作简谐运动.而且可以证明它们的频率相同,均由弹簧振子的固有性质决定,这就是称为固有频率的原因.(2) 如果振动系统如图(c)(弹簧并联)或如图(d)所示,也可通过物体在某一位置的受力分析得出其作简谐运动,且振动频率均为,读者可以一试.通过这些例子可以知道,证明物体是否作简谐运动的思路是相同的.5-8 一放置在水平桌面上的弹簧振子,振幅A=2.0 ×10 m,周期T=0.50s.当t=0 时,(1) 物体在正方向端点;(2) 物体在平衡位置、向负方向运动;(3) 物体在x =-1.0×10m 处, 向负方向运动; (4) 物体在x=-1.0×10 m处,向正方向运动.求以上各种情况的运动方程.分析 在振幅A 和周期T 已知的条件下,确定初相φ是求解简谐运动方程的关键.初相的确定通常有两种方法.(1) 解析法:由振动方程出发,根据初始条件,即t =0 时,x =x-2 和v =v-2 来确定φ值.(2) 旋转矢量法:如图(a)所示,将质点P 在Ox 轴上振动的初始位置x-2 和速度v 的方向与旋转矢量图相对应来确定φ.旋转矢量法比较直观、方便,在分析中常采用.题5-8 图解 由题给条件知A =2.0 ×10 m,,而初相φ可采用分析中的两种不同方法来求.
《水浒传》中三位女将是谁 ? 她们的绰号是什么?
①扈三娘、一丈青 ②孙二娘、母夜叉 ③顾大嫂、母大虫
解 (1) 将与比较后可得:振幅A =0.10m,角频率,初相=0.25,则周期,频率.
(2)时的位移、速度、加速度分别为
5-6 一远洋货轮,质量为m,浮在水面时其水平截面积为S.设在水面附近货轮的水平截面积近似相等,水的密度为ρ,且不计水的粘滞阻力,证明货轮在水中作振幅较小的竖直自由运动是简谐运动,并求振动周期.
分析 要证明货轮作简谐运动,需要分析货轮在平衡位置附近上下运动时,它所受的合外力与位移间的关系,如果满足,则货轮作简谐运动.通过即可求得振动周期.
证 货轮处于平衡状态时[图(a)],浮力大小为F =mg.当船上下作微小振动时,取货轮处于力平衡时的质心位置为坐标原点O,竖直向下为x 轴正向,如图(b)所示.则当货轮向下偏移x 位移时,受合外力为
其中为此时货轮所受浮力,其方向向上,大小为
题5-6 图
则货轮所受合外力为
式中是一常数.这表明货轮在其平衡位置上下所作的微小振动是简谐运动.
由可得货轮运动的微分方程为
令,可得其振动周期为
5-7 如图(a)所示,两个轻弹簧的劲度系数分别为、 .当物体在光滑斜面上振动时.(1) 证明其运动仍是简谐运动;(2) 求系统的振动频率.
题5-7 图
分析 从上两题的求解知道,要证明一个系统作简谐运动,首先要分析受力情况,然后看是否满足简谐运动的受力特征(或简谐运动微分方程).为此,建立如图(b)所示的坐标.设系统平衡时物体所在位置为坐标原点O,Ox 轴正向沿斜面向下,由受力分析可知,沿Ox 轴,物体受弹性力及重力分力的作用,其中弹性力是变力.利用串联时各弹簧受力相等,分析物体在任一位置时受力与位移的关系,即可证得物体作简谐运动,并可求出频率.
证 设物体平衡时两弹簧伸长分别为、,则由物体受力平衡,有
(1)
按图(b)所取坐标,物体沿x 轴移动位移x时,两弹簧又分别被拉伸和,即.则物体受力为
(2)
将式(1)代入式(2)得
(3)
由式(3)得、,而,则得到
式中为常数,则物体作简谐运动,振动频率
讨论 (1) 由本题的求证可知,斜面倾角θ 对弹簧是否作简谐运动以及振动的频率均不产生影响.事实上,无论弹簧水平放置、斜置还是竖直悬挂,物体均作简谐运动.而且可以证明它们的频率相同,均由弹簧振子的固有性质决定,这就是称为固有频率的原因.(2) 如果振动系统如图(c)(弹簧并联)或如图(d)所示,也可通过物体在某一位置的受力分析得出其作简谐运动,且振动频率均为,读者可以一试.通过这些例子可以知道,证明物体是否作简谐运动的思路是相同的.
5-8 一放置在水平桌面上的弹簧振子,振幅A=2.0 ×10 m,周期T=0.50s.当t=0 时,(1) 物体在正方向端点;(2) 物体在平衡位置、向负方向运动;(3) 物体在x =-1.0×10m 处, 向负方向运动; (4) 物体在x=-1.0×10 m处,向正方向运动.求以上各种情况的运动方程.
分析 在振幅A 和周期T 已知的条件下,确定初相φ是求解简谐运动方程的关键.初相的确定通常有两种方法.(1) 解析法:由振动方程出发,根据初始条件,即t =0 时,x =x-2 和v =v-2 来确定φ值.(2) 旋转矢量法:如图(a)所示,将质点P 在Ox 轴上振动的初始位置x-2 和速度v 的方向与旋转矢量图相对应来确定φ.旋转矢量法比较直观、方便,在分析中常采用.
题5-8 图
解 由题给条件知A =2.0 ×10 m,,而初相φ可采用分析中的两种不同方法来求.
题目解答
答案
解析法:根据简谐运动方程 ,当
,当 时有
时有 ,
, .当
.当
(1) 时,
时, ,则
,则 ;
;
(2) 时,
时, ,
, ,因
,因 ,取
,取 ;
;
(3) 时,
时, ,
, ,由,取
,由,取 ;
;
(4) 时,
时,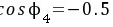 ,
, ,由
,由 ,取
,取 .
.
旋转矢量法:分别画出四个不同初始状态的旋转矢量图,如图(b)所示,它们所对应的初相分别为,,,.
振幅A、角频率ω、初相φ均确定后,则各相应状态下的运动方程为
(1)
(2)
(3)
(4)
5-9 有一弹簧, 当其下端挂一质量为m 的物体时, 伸长量为9.8 ×10-2 m.若使物体上、下振动,且规定向下为正方向.(1) 当t =0 时,物体在平衡位置上方8.0 ×10-2 m 处,由静止开始向下运动,求运动方程.(2) 当t =0 时,物体在平衡位置并以0.6m·s-1的速度向上运动,求运动方程.
分析 求运动方程,也就是要确定振动的三个特征物理量A、ω和φ.其中振动的角频率是由弹簧振子系统的固有性质(振子质量m 及弹簧劲度系数k)决定的,即 ,k 可根据物体受力平衡时弹簧的伸长来计算;振幅A 和初相φ需要根据初始条件确定.
,k 可根据物体受力平衡时弹簧的伸长来计算;振幅A 和初相φ需要根据初始条件确定.
题5-9 图
解 物体受力平衡时,弹性力F 与重力P 的大小相等,即F =mg.而此时弹簧的伸长量Δl =9.8 ×10-2m.则弹簧的劲度系数k =F /Δl =mg /Δl.系统作简谐运动的角频率为

(1) 设系统平衡时,物体所在处为坐标原点,向下为x 轴正向.由初始条件t =0 时,x10 =8.0 ×10-2 m、v10 =0 可得振幅 ;应用旋转矢量法可确定初相
;应用旋转矢量法可确定初相 [图(a)].则运动方程为
[图(a)].则运动方程为

(2)t =0 时,x20 =0、v20 =0.6 m·s-1 ,同理可得 ;
; [图(b)].则运动方程为
[图(b)].则运动方程为

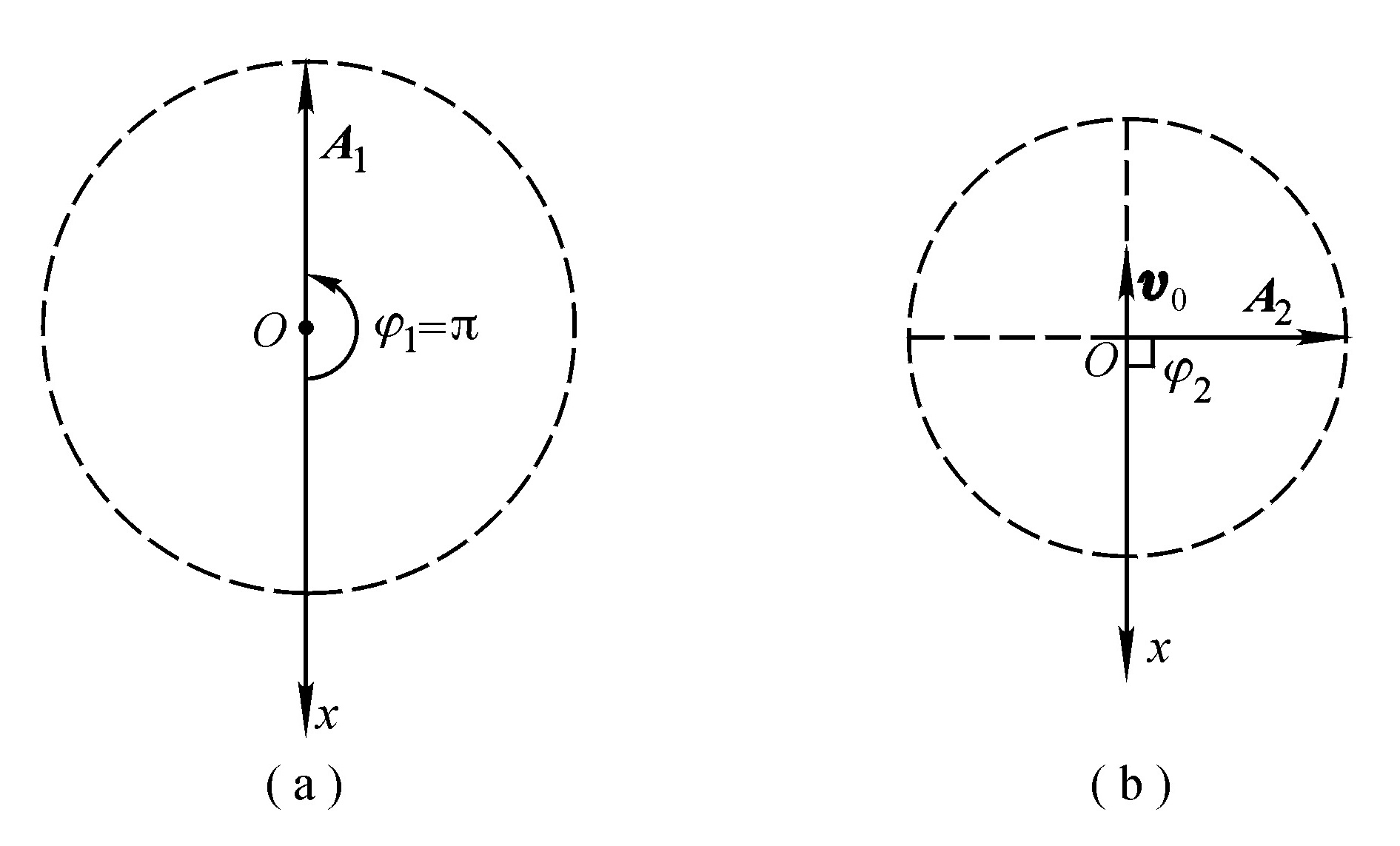
5-10 某振动质点的x-t 曲线如图(a)所示,试求:(1) 运动方程;(2) 点P 对应的相位;(3) 到达点P 相应位置所需的时间.
分析 由已知运动方程画振动曲线和由振动曲线求运动方程是振动中常见的两类问题.本题就是要通过x -t 图线确定振动的三个特征量A、ω和 ,从而写出运动方程.曲线最大幅值即为振幅A;而ω、通常可通过旋转矢量法或解析法解出,一般采用旋转矢量法比较方便.
,从而写出运动方程.曲线最大幅值即为振幅A;而ω、通常可通过旋转矢量法或解析法解出,一般采用旋转矢量法比较方便.
解 (1) 质点振动振幅A =0.10 m.而由振动曲线可画出t =0 和t1 =4 s时旋转矢量,如图(b) 所示.由图可见初相 (或
(或 ),而由
),而由 得
得 ,则运动方程为
,则运动方程为

题5-10 图
(2) 图(a)中点P 的位置是质点从A/2 处运动到正向的端点处.对应的旋转矢量图如图(c) 所示.当初相取时,点P 的相位为 (如果初相取成,则点P 相应的相位应表示为
(如果初相取成,则点P 相应的相位应表示为 .
.
(3) 由旋转矢量图可得 ,则
,则 .
.
5-11 质量为10 g的物体沿x的轴作简谐运动,振幅A=10 cm,周期T=4.0 s,t=0 时物体的位移为 且物体朝x轴负方向运动,求(1)t=1.0 s时物体的位移;(2)t=1.0 s 时物体受的力;(3)t=0之后何时物体第一次到达 x=5.0 cm处;(4)第二次和第一次经过x=5.0 cm处的时间间隔.
且物体朝x轴负方向运动,求(1)t=1.0 s时物体的位移;(2)t=1.0 s 时物体受的力;(3)t=0之后何时物体第一次到达 x=5.0 cm处;(4)第二次和第一次经过x=5.0 cm处的时间间隔.
分析 根据题给条件可以先写出物体简谐运动方程 .其中振幅A,角频率
.其中振幅A,角频率 均已知,而初相
均已知,而初相 可由题给初始条件利用旋转矢量法方便求出. 有了运动方程,t时刻位移x和t时刻物体受力
可由题给初始条件利用旋转矢量法方便求出. 有了运动方程,t时刻位移x和t时刻物体受力 也就可以求出. 对于(3)、(4)两问均可通过作旋转矢量图并根据公式
也就可以求出. 对于(3)、(4)两问均可通过作旋转矢量图并根据公式 很方便求解.
很方便求解.
解 由题给条件画出t=0时该简谐运动的旋转矢量图如图(a)所示,可知初相 .而A=0.10 m,
.而A=0.10 m, .则简谐运动方程为
.则简谐运动方程为
(1)t=1.0 s 时物体的位移
(2)t=1.0 s时物体受力
(3)设t=0时刻后,物体第一次到达x=5.0 cm处的时刻为t,画出t=0和t=t时刻的旋转矢量图,如图(b)所示,由图可知,A与A的相位差为,由得

(4)设t=0时刻后,物体第二次到达x=5.0 cm处的时刻为t ,画出t=t和t= t时刻的旋转矢量图,如图(c)所示,由图可知,A
,画出t=t和t= t时刻的旋转矢量图,如图(c)所示,由图可知,A 与A的相位差为,故有
与A的相位差为,故有

题 5-11 图
5-12 图(a)为一简谐运动质点的速度与时间的关系曲线,且振幅为2cm,求(1) 振动周期;(2) 加速度的最大值;(3) 运动方程.
分析 根据v-t 图可知速度的最大值v ,由v =Aω可求出角频率ω,进而可求出周期T 和加速度的最大值a =Aω .在要求的简谐运动方程x =Acos(ωt +φ)中,因为A 和ω已得出,故只要求初相位φ即可.由v -t 曲线图可以知道,当t =0 时,质点运动速度v =v/2 =Aω/2,之后速度越来越大,因此可以判断出质点沿x 轴正向向着平衡点运动.利用v =-Aωsinφ就可求出φ.
解 (1) 由得,则
(2)
(3) 从分析中已知 ,即
,即


因为质点沿x 轴正向向平衡位置运动,则取 ,其旋转矢量图如图(b)所示.则运动方程为
,其旋转矢量图如图(b)所示.则运动方程为

题5-12 图
5-13 有一单摆,长为1.0m,最大摆角为5°,如图所示.(1) 求摆的角频率和周期;(2) 设开始时摆角最大,试写出此单摆的运动方程;(3) 摆角为3°时的角速度和摆球的线速度各为多少?
题5-13 图
分析 单摆在摆角较小时(θ<5°)的摆动,其角量θ与时间的关系可表示为简谐运动方程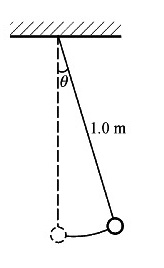 ,其中角频率ω仍由该系统的性质(重力加速度g 和绳长)决定,即.初相φ与摆角θ,质点的角速度与旋转矢量的角速度(角频率)均是不同的物理概念,必须注意区分.
,其中角频率ω仍由该系统的性质(重力加速度g 和绳长)决定,即.初相φ与摆角θ,质点的角速度与旋转矢量的角速度(角频率)均是不同的物理概念,必须注意区分.
解 (1) 单摆角频率及周期分别为

(2) 由时可得振动初相,则以角量表示的简谐运动方程为

(3) 摆角为3°时,有,则这时质点的角速度为
线速度的大小为

讨论 质点的线速度和角速度也可通过机械能守恒定律求解,但结果会有极微小的差别.这是因为在导出简谐运动方程时曾取,所以,单摆的简谐运动方程仅在θ 较小时成立.
*5-14 一飞轮质量为12kg,内缘半径r =0.6m,如图所示.为了测定其对质心轴的转动惯量,现让其绕内缘刃口摆动,在摆角较小时,测得周期为2.0s,试求其绕质心轴的转动惯量.

题5-14图
分析 飞轮的运动相当于一个以刃口为转轴的复摆运动,复摆振动周期为 ,因此,只要知道复摆振动的周期和转轴到质心的距离,其以刃口为转轴的转动惯量即可求得.再根据平行轴定理,可求出其绕质心轴的转动惯量.
,因此,只要知道复摆振动的周期和转轴到质心的距离,其以刃口为转轴的转动惯量即可求得.再根据平行轴定理,可求出其绕质心轴的转动惯量.
解 由复摆振动周期,可得(这里).则由平行轴定理得
5-15 如图(a)所示,质量为1.0 ×10kg 的子弹,以500 m·s的速度射入木块,并嵌在木块中,同时使弹簧压缩从而作简谐运动,设木块的质量为4.99 kg,弹簧的劲度系数为8.0 ×103 N·m ,若以弹簧原长时物体所在处为坐标原点,向左为x 轴正向,求简谐运动方程.

题5-15 图
分析 可分为两个过程讨论.首先是子弹射入木块的过程,在此过程中,子弹和木块组成的系统满足动量守恒,因而可以确定它们共同运动的初速度v ,即振动的初速度.随后的过程是以子弹和木块为弹簧振子作简谐运动.它的角频率由振子质量m +m 和弹簧的劲度系数k 确定,振幅和初相可根据初始条件(初速度v 和初位移x )求得.初相位仍可用旋转矢量法求.
解 振动系统的角频率为
由动量守恒定律得振动的初始速度即子弹和木块的共同运动初速度v 为

又因初始位移x =0,则振动系统的振幅为
图(b)给出了弹簧振子的旋转矢量图,从图中可知初相位,则简谐运动方程为

5-16 如图(a)所示,一劲度系数为k 的轻弹簧,其下挂有一质量为m 的空盘.现有一质量为m 的物体从盘上方高为h 处自由落入盘中,并和盘粘在一起振动.问:(1) 此时的振动周期与空盘作振动的周期有何不同? (2) 此时的振幅为多大?

题5-16 图
分析 原有空盘振动系统由于下落物体的加入,振子质量由m 变为m + m,因此新系统的角频率(或周期)要改变.由于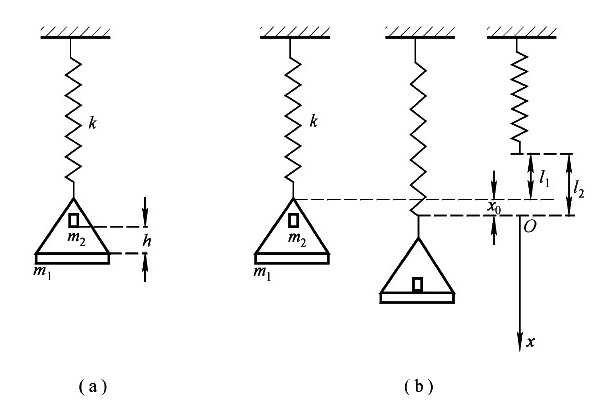 ,因此,确定初始速度v 和初始位移x 是求解振幅A 的关键.物体落到盘中,与盘作完全非弹性碰撞,由动量守恒定律可确定盘与物体的共同初速度v ,这也是该振动系统的初始速度.在确定初始时刻的位移x 时,应注意新振动系统的平衡位置应是盘和物体悬挂在弹簧上的平衡位置.因此,本题中初始位移x ,也就是空盘时的平衡位置相对新系统的平衡位置的位移.
,因此,确定初始速度v 和初始位移x 是求解振幅A 的关键.物体落到盘中,与盘作完全非弹性碰撞,由动量守恒定律可确定盘与物体的共同初速度v ,这也是该振动系统的初始速度.在确定初始时刻的位移x 时,应注意新振动系统的平衡位置应是盘和物体悬挂在弹簧上的平衡位置.因此,本题中初始位移x ,也就是空盘时的平衡位置相对新系统的平衡位置的位移.
解 (1) 空盘时和物体落入盘中后的振动周期分别为
可见T′>T,即振动周期变大了.
(2) 如图(b)所示,取新系统的平衡位置为坐标原点O.则根据分析中所述,初始位移为空盘时的平衡位置相对粘上物体后新系统平衡位置的位移,即
式中为空盘静止时弹簧的伸长量,l =为物体粘在盘上后,静止时弹簧的伸长量.由动量守恒定律可得振动系统的初始速度,即盘与物体相碰后的速度

式中 是物体由h 高下落至盘时的速度.故系统振动的振幅为
是物体由h 高下落至盘时的速度.故系统振动的振幅为
本题也可用机械能守恒定律求振幅A.
5-17 质量为0.10kg的物体,以振幅1.0×10 m 作简谐运动,其最大加速度为4.0 m·s
求:(1) 振动的周期;(2) 物体通过平衡位置时的总能量与动能;(3) 物体在何处其动能和势能相等? (4) 当物体的位移大小为振幅的一半时,动能、势能各占总能量的多少?
分析 在简谐运动过程中,物体的最大加速度,由此可确定振动的周期T.另外,在简谐运动过程中机械能是守恒的,其中动能和势能互相交替转化,其总能量E =kA-2/2.当动能与势能相等时,E-1 =E =kA/4.因而可求解本题.
解 (1) 由分析可得振动周期

(2) 当物体处于平衡位置时,系统的势能为零,由机械能守恒可得系统的动能等于总能量,即

(3) 设振子在位移x 处动能与势能相等,则有
得
(4) 物体位移的大小为振幅的一半(即 )时的势能为
)时的势能为

则动能为 
5-18 一劲度系数 k=312  的轻弹簧,一端固定,另一端连接一质量的物体,放在光滑的水平面上,上面放一质量为的物体,两物体间的最大静摩擦系数.求两物体间无相对滑动时,系统振动的最大能量.
的轻弹簧,一端固定,另一端连接一质量的物体,放在光滑的水平面上,上面放一质量为的物体,两物体间的最大静摩擦系数.求两物体间无相对滑动时,系统振动的最大能量.
分析 简谐运动系统的振动能量为 .因此只要求出两物体间无相对滑动条件下,该系统的最大振幅即可求出系统振动的最大能量.因为两物体间无相对滑动,故可将它们视为一个整体,则根据简谐运动频率公式可得其振动角频率为.然后以物体m为研究对象,它和m一起作简谐运动所需的回复力是由两物体间静摩擦力来提供的.而其运动中所需最大静摩擦力应对应其运动中具有最大加速度时,即,由此可求出.
.因此只要求出两物体间无相对滑动条件下,该系统的最大振幅即可求出系统振动的最大能量.因为两物体间无相对滑动,故可将它们视为一个整体,则根据简谐运动频率公式可得其振动角频率为.然后以物体m为研究对象,它和m一起作简谐运动所需的回复力是由两物体间静摩擦力来提供的.而其运动中所需最大静摩擦力应对应其运动中具有最大加速度时,即,由此可求出.
解 根据分析,振动的角频率
由得
则最大能量
5-19 已知两同方向、同频率的简谐运动的运动方程分别为;.求:(1) 合振动的振幅及初相;(2) 若有另一同方向、同频率的简谐运动,则为多少时,x +x 的振幅最大? 又 为多少时,x +x 的振幅最小?
题5-19 图
分析 可采用解析法或旋转矢量法求解.由旋转矢量合成可知,两个同方向、同频率简谐运动
的合成仍为一简谐运动,其角频率不变;合振动的振幅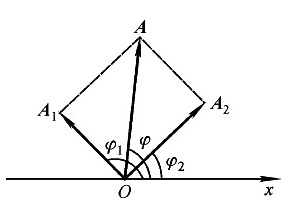 ,其大小与两个分振动的初相差相关.而合振动的初相位
,其大小与两个分振动的初相差相关.而合振动的初相位
解 (1) 作两个简谐运动合成的旋转矢量图(如图).因为,故合振动振幅为

合振动初相位

(2) 要使x +x 振幅最大,即两振动同相,则由 得
得
要使x +x 的振幅最小,即两振动反相,则由 得
得

5-20 两个同频率的简谐运动1 和2 的振动曲线如图(a)所示,求(1)两简谐运动的运动方程x 和x;(2) 在同一图中画出两简谐运动的旋转矢量,并比较两振动的相位关系;(3) 若两简谐运动叠加,求合振动的运动方程.
分析 振动图已给出了两个简谐运动的振幅和周期,因此只要利用图中所给初始条件,由旋转矢量法或解析法求出初相位,便可得两个简谐运动的方程.
解 (1) 由振动曲线可知,A =0.1 m,T =2s,则ω=2π/T =πs .曲线1表示质点初始时刻在x =0 处且向x 轴正向运动,因此φ =-π/2;曲线2 表示质点初始时刻在x =A /2 处且向x 轴负向运动,因此φ =π/3.它们的旋转矢量图如图(b)所示.则两振动的运动方程分别为
和
(2) 由图(b)可知振动2超前振动1 的相位为5π/6.
(3)
其中
则合振动的运动方程为 

题5-20 图
5-21 将频率为348 Hz的标准音叉振动和一待测频率的音叉振动合成,测得拍频为3.0Hz.若在待测频率音叉的一端加上一小块物体,则拍频数将减少,求待测音叉的固有频率.
分析 这是利用拍现象来测定振动频率的一种方法.在频率 和拍频数Δ=| -|已知的情况下,待测频率 可取两个值,即 = ±Δ.式中Δ前正、负号的选取应根据待测音叉系统质量改变时,拍频数变化的情况来决定.
解 根据分析可知,待测频率的可能值为
= ±Δ =(348 ±3) Hz