【名师解析】 (1)a.对小球,由平衡条件mg=ks。 b.设小球偏离平衡位置x时的回复力为F回=mg﹣k(s+x)=﹣kx,故小球做简谐运动。 (2)a.重力势能EpG=﹣mgx 以平衡位置处弹性势能为0,从平衡位置(弹簧伸长量为s)到坐标为x处(弹簧伸长量为s+x),根据弹簧弹力特点做出F﹣x图线如图,弹簧弹力做功为exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx), exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)设x坐标处的弹性势能为Ep弹,由弹力做功与弹性势能变化量的关系可知W弹=﹣△Ep弹,即 W弹=﹣(Ep弹﹣0) 得Ep弹=﹣W弹=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2+ksx=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2+mgx 重力势能Ep电和弹性势能Ep弹的总和Ep=EpG+Ep弹=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2。 b.小球在运动到平衡位置O点下方距离为exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)时的势能exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx) 小球在振幅处的动能为零,依据能量守恒定律有exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx) 可得,exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)。 由能量守恒定律Ep+Ek=Epmax+Ekmin,即exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2+exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)mv2=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kA2,也即kx2+mv2=kA2 整理得:exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)。 故v﹣x图是椭圆。 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)故答案为:(1)a.exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx);b.见解析。 (2)a.见解析。b.exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx);见解析。 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)2021年高考物理100考点最新模拟题千题精练 第二部分 机械振动和机械波 专题2.3机械振动(能力篇) 一.填空题 L.某质点做简谐运动,从A点经历时间1s第一次运动到B点,路程为8cm,A、B两位置质点的动能相同,再经相同的时间回到A点。该质点做简谐运动的周期T=_ _s,振幅A= m,以第一次经过最大位移时开始计时,再次回到A点时速度方向为正方向,质点位移x随时间t变化的函数关系为 。 【参考答案】.2 4 x=4cosπtcm。(或exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)) 【命题意图】 本题考查简谐运动、位移x随时间t变化的函数关系及其相关知识点,考查的核心素养是“运动和力”的观点。 【解题思路】根据题述,质点做简谐运动,从A点经历时间1s第一次运动到B点,AB再经过相同的时间回到A点,可知该质点是从最大位移处(A点)出发,其B点为负的最大位移处,其振动周期为T=2s,振幅为A=4cm。以第一次经过最大位移处开始计时,再次回到A点时速度方向为正方向,质点位移x随时间t变化的函数关系为x=Acosexists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)t=4cosπtcm。 2.理论表明:弹簧振子的总机械能与振幅的平方成正比,即E=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx),k为弹簧的劲度系数。如图,一劲度系数为k的轻弹簧一端固定,另一端连接着质量为M的物块,物块在光滑水平面上往复运动。当物块运动到最大位移为A的时刻,把质量为m的物块轻放在其上.两个物块始终一起振动。它们之间动摩擦因数至少为____;经过平衡位置的速度为___;振幅为____。(设最大静摩擦力等于滑动摩擦力) exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)【参考答案】.(1)考査简谐运动的特点。 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx),exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx),A 【名师解析】两个物块一起振动,即加速度相同。系统的最大加速度为 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)而m的加速度由二者之间的最大静摩擦力提供 max=g,所以exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx); 它们经过平衡位置时,机械能全部转化为动能,故 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx),所以exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx) 由于振动过程中系统机械能守恒,而弹簧振子的总机械能与振幅的平方成正比,所以振幅不变,仍为A。 二.选择题 1. 如图所示,两根完全相同的弹簧和一根张紧的细线将甲、乙两物块束缚在光滑水平面上,已知甲的质量大于乙的质量。当细线突然断开后,两物块都开始做简谐运动,在运动过程中( ) exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)A.甲的振幅大于乙的振幅 B.甲的振幅小于乙的振幅 C.甲的最大速度小于乙的最大速度 D.甲的最大速度大于乙的最大速度 【参考答案】 C 【名师解析】细线断开前,两根弹簧上的弹力大小相同,弹簧的伸长量相同,细线断开后,两物块都开始做简谐运动,简谐运动的平衡位置都在弹簧原长位置,所以它们的振幅相等,选项A、B错误;两物块做简谐运动时,动能和势能相互转化,总机械能保持不变,细线断开前,弹簧的弹性势能就是物块做简谐运动时的机械能,所以振动过程中,它们的机械能相等,到达平衡位置时,它们的弹性势能为零,动能达到最大,因为甲的质量大于乙的质量,所以甲的最大速度小于乙的最大速度,选项C正确、D错误。 2.(多选)弹簧振子在光滑水平面上振动,其位移时间图象如图所示,则下列说法正确的是 。 Aexists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx).10秒内振子的路程为2m B.动能变化的周期为2.0s C.在t=0.5s时,弹簧的弹力最大 D.在t=1.0s时,振子的速度反向 E.振动方程是x=0.10sinπt(m) 【参考答案】ACE 【名师解析】根据振动图象可知周期T=2.0s,振幅A=10cm,t=10s=5T,一个周期通过的路程为4A,则10s内通过的路程s=5×4A=20×10cm=200cm=2m,故A正确;每次经过平衡位置动能最大,在最大位移处动能为0,在振子完成一个周期的时间内,动能完成2个周期的变化,故动能变化的周期为1s,故B错误;t=0.5s时,振子处于最大位移处,弹簧的弹力最大,故C正确;在t=0.5s到t=1.5s时间内振子沿x负方向运动,在t=0.1s时,振子的速度未反向,故D错误;由振动图象知T=2.0s,角速度ω=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)rad/s=πrad/s,振动方程x=0.10sinπt(m),故E正确。故选ACE。 三.计算题 1.如图,劲度系数为k的轻质弹簧的下端固定在水平面上,弹簧上端与质量为m的物块相连,开始时物块在O处保持静止。现用竖直向下的外力压物块,弹簧始终在弹性限度内,然后撤去外力,物块开始运动,试证明撤去外力后物块的运动是筒谐振动。 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)【名师解析】 取竖直向下方向为正方向,以O点为原点竖直向下建立Ox坐标系,如图示 设物块在平衡位置O点,弹簧的压缩量为x0,有 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)当物块向下离开O点位移为x时,有 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)解得: exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)满足简谐振动的回复力特征,所以物块的运动为简谐振动 2.如图所示,一劲度系数为k的轻弹簧的上端固定,下端与小球相连接,小球的质量为m,小球静止于O点。现将小球拉到O点下方距离为A的位置,由静止释放,此后运动过程中始终未超过弹簧的弹性限度。规定平衡位置处为重力势能和弹簧弹性势能的零点。以平衡位置O为坐标原点建立如图所示的竖直向下的一维坐标系Ox.忽略空气阻力的影响。 (1)从运动与相互作用观点出发,解决以下问题: a.求小球处于平衡状态时弹簧相对原长的伸长量s; b.证明小球做简谐运动; (2)从教科书中我们明白了由v﹣t图象求直线运动位移的思想和方法;从机械能的学习,我们理解了重力做功的特点并进而引入重力势能,由此可以得到重力做功与重力势能变化量之间的关系。图象法和比较法是研究物理问题的重要方法,请你借鉴此方法,从功与能量的观点出发,解决以下问题: a.小球运动过程中,小球相对平衡位置的位移为x时,证明系统具有的重力势能EpG和弹性势能Ep弹的总和Ep的表达式为Ep=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx); b.求小球在振动过程中,运动到平衡位置O点下方距离为exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)时的动能Ek.并根据小球运动过程中速度v与相对平衡位置的位移x的关系式,画出小球运动的全过程中速度随振动位移变化的v﹣x图象。 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)【名师解析】 (1)a.对小球,由平衡条件mg=ks。 b.设小球偏离平衡位置x时的回复力为F回=mg﹣k(s+x)=﹣kx,故小球做简谐运动。 (2)a.重力势能EpG=﹣mgx 以平衡位置处弹性势能为0,从平衡位置(弹簧伸长量为s)到坐标为x处(弹簧伸长量为s+x),根据弹簧弹力特点做出F﹣x图线如图,弹簧弹力做功为exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx), exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)设x坐标处的弹性势能为Ep弹,由弹力做功与弹性势能变化量的关系可知W弹=﹣△Ep弹,即 W弹=﹣(Ep弹﹣0) 得Ep弹=﹣W弹=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2+ksx=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2+mgx 重力势能Ep电和弹性势能Ep弹的总和Ep=EpG+Ep弹=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2。 b.小球在运动到平衡位置O点下方距离为exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)时的势能exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx) 小球在振幅处的动能为零,依据能量守恒定律有exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx) 可得,exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)。 由能量守恒定律Ep+Ek=Epmax+Ekmin,即exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kx2+exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)mv2=exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)kA2,也即kx2+mv2=kA2 整理得:exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)。 故v﹣x图是椭圆。 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)故答案为:(1)a.exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx);b.见解析。 (2)a.见解析。b.exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx);见解析。 3.有一弹簧振子在水平方向上的B、C之间做简谐运动,已知B、C间的距离为20cm,振子在2s内完成了10次全振动。若从某时刻振子经过平衡位置时开始计时(t=0),经过周期振子有正向最大加速度。 exists y=dfrac (ks+k(s+x))(2)x=-(dfrac (1)(2)k(x)^2+ksx)(1)求振子的振幅和周期; (2)在图中作出该振子的位移—时间图象; (3)写出振子的振动方程。
【名师解析】
(1)a.对小球,由平衡条件mg=ks。
b.设小球偏离平衡位置x时的回复力为F回=mg﹣k(s+x)=﹣kx,故小球做简谐运动。
(2)a.重力势能EpG=﹣mgx
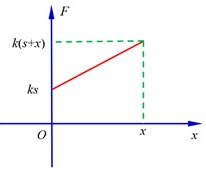
以平衡位置处弹性势能为0,从平衡位置(弹簧伸长量为s)到坐标为x处(弹簧伸长量为s+x),根据弹簧弹力特点做出F﹣x图线如图,弹簧弹力做功为![]() ,
,
设x坐标处的弹性势能为Ep弹,由弹力做功与弹性势能变化量的关系可知W弹=﹣△Ep弹,即
W弹=﹣(Ep弹﹣0)
得Ep弹=﹣W弹=![]() kx2+ksx=
kx2+ksx=![]() kx2+mgx
kx2+mgx
重力势能Ep电和弹性势能Ep弹的总和Ep=EpG+Ep弹=![]() kx2。
kx2。
b.小球在运动到平衡位置O点下方距离为![]() 时的势能
时的势能![]()
小球在振幅处的动能为零,依据能量守恒定律有![]()
可得,![]() 。
。
由能量守恒定律Ep+Ek=Epmax+Ekmin,即![]() kx2+
kx2+![]() mv2=
mv2=![]() kA2,也即kx2+mv2=kA2
kA2,也即kx2+mv2=kA2
整理得: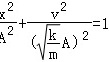 。
。
故v﹣x图是椭圆。
故答案为:(1)a.![]() ;b.见解析。
;b.见解析。
(2)a.见解析。b.![]() ;见解析。
;见解析。

2021年高考物理100考点最新模拟题千题精练
第二部分 机械振动和机械波
专题2.3机械振动(能力篇)
一.填空题
L.某质点做简谐运动,从A点经历时间1s第一次运动到B点,路程为8cm,A、B两位置质点的动能相同,再经相同的时间回到A点。该质点做简谐运动的周期T=_ _s,振幅A= m,以第一次经过最大位移时开始计时,再次回到A点时速度方向为正方向,质点位移x随时间t变化的函数关系为 。
【参考答案】.2 4 x=4cosπtcm。(或![]() )
)
【命题意图】 本题考查简谐运动、位移x随时间t变化的函数关系及其相关知识点,考查的核心素养是“运动和力”的观点。
【解题思路】根据题述,质点做简谐运动,从A点经历时间1s第一次运动到B点,AB再经过相同的时间回到A点,可知该质点是从最大位移处(A点)出发,其B点为负的最大位移处,其振动周期为T=2s,振幅为A=4cm。以第一次经过最大位移处开始计时,再次回到A点时速度方向为正方向,质点位移x随时间t变化的函数关系为x=Acos![]() t=4cosπtcm。
t=4cosπtcm。
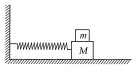
2.理论表明:弹簧振子的总机械能与振幅的平方成正比,即E=![]() ,k为弹簧的劲度系数。如图,一劲度系数为k的轻弹簧一端固定,另一端连接着质量为M的物块,物块在光滑水平面上往复运动。当物块运动到最大位移为A的时刻,把质量为m的物块轻放在其上.两个物块始终一起振动。它们之间动摩擦因数至少为____;经过平衡位置的速度为___;振幅为____。(设最大静摩擦力等于滑动摩擦力)
,k为弹簧的劲度系数。如图,一劲度系数为k的轻弹簧一端固定,另一端连接着质量为M的物块,物块在光滑水平面上往复运动。当物块运动到最大位移为A的时刻,把质量为m的物块轻放在其上.两个物块始终一起振动。它们之间动摩擦因数至少为____;经过平衡位置的速度为___;振幅为____。(设最大静摩擦力等于滑动摩擦力)
【参考答案】.(1)考査简谐运动的特点。
![]() ,
,![]() ,A
,A
【名师解析】两个物块一起振动,即加速度相同。系统的最大加速度为
![]()
而m的加速度由二者之间的最大静摩擦力提供
max=g,所以![]() ;
;
它们经过平衡位置时,机械能全部转化为动能,故
![]() ,所以
,所以![]()
由于振动过程中系统机械能守恒,而弹簧振子的总机械能与振幅的平方成正比,所以振幅不变,仍为A。
二.选择题
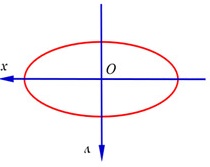
1. 如图所示,两根完全相同的弹簧和一根张紧的细线将甲、乙两物块束缚在光滑水平面上,已知甲的质量大于乙的质量。当细线突然断开后,两物块都开始做简谐运动,在运动过程中( )
![]()
A.甲的振幅大于乙的振幅
B.甲的振幅小于乙的振幅
C.甲的最大速度小于乙的最大速度
D.甲的最大速度大于乙的最大速度
【参考答案】 C
【名师解析】细线断开前,两根弹簧上的弹力大小相同,弹簧的伸长量相同,细线断开后,两物块都开始做简谐运动,简谐运动的平衡位置都在弹簧原长位置,所以它们的振幅相等,选项A、B错误;两物块做简谐运动时,动能和势能相互转化,总机械能保持不变,细线断开前,弹簧的弹性势能就是物块做简谐运动时的机械能,所以振动过程中,它们的机械能相等,到达平衡位置时,它们的弹性势能为零,动能达到最大,因为甲的质量大于乙的质量,所以甲的最大速度小于乙的最大速度,选项C正确、D错误。
2.(多选)弹簧振子在光滑水平面上振动,其位移时间图象如图所示,则下列说法正确的是 。
A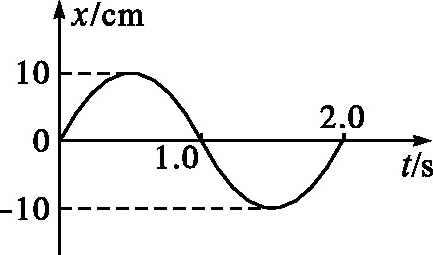 .10秒内振子的路程为2m
.10秒内振子的路程为2m
B.动能变化的周期为2.0s
C.在t=0.5s时,弹簧的弹力最大
D.在t=1.0s时,振子的速度反向
E.振动方程是x=0.10sinπt(m)
【参考答案】ACE
【名师解析】根据振动图象可知周期T=2.0s,振幅A=10cm,t=10s=5T,一个周期通过的路程为4A,则10s内通过的路程s=5×4A=20×10cm=200cm=2m,故A正确;每次经过平衡位置动能最大,在最大位移处动能为0,在振子完成一个周期的时间内,动能完成2个周期的变化,故动能变化的周期为1s,故B错误;t=0.5s时,振子处于最大位移处,弹簧的弹力最大,故C正确;在t=0.5s到t=1.5s时间内振子沿x负方向运动,在t=0.1s时,振子的速度未反向,故D错误;由振动图象知T=2.0s,角速度ω=![]() rad/s=πrad/s,振动方程x=0.10sinπt(m),故E正确。故选ACE。
rad/s=πrad/s,振动方程x=0.10sinπt(m),故E正确。故选ACE。
三.计算题
1.如图,劲度系数为k的轻质弹簧的下端固定在水平面上,弹簧上端与质量为m的物块相连,开始时物块在O处保持静止。现用竖直向下的外力压物块,弹簧始终在弹性限度内,然后撤去外力,物块开始运动,试证明撤去外力后物块的运动是筒谐振动。
【名师解析】
取竖直向下方向为正方向,以O点为原点竖直向下建立Ox坐标系,如图示
设物块在平衡位置O点,弹簧的压缩量为x0,有
![]()

当物块向下离开O点位移为x时,有
![]()
解得: ![]()
满足简谐振动的回复力特征,所以物块的运动为简谐振动
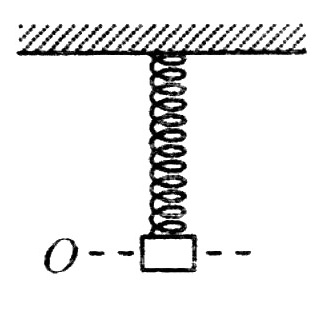
2.如图所示,一劲度系数为k的轻弹簧的上端固定,下端与小球相连接,小球的质量为m,小球静止于O点。现将小球拉到O点下方距离为A的位置,由静止释放,此后运动过程中始终未超过弹簧的弹性限度。规定平衡位置处为重力势能和弹簧弹性势能的零点。以平衡位置O为坐标原点建立如图所示的竖直向下的一维坐标系Ox.忽略空气阻力的影响。
(1)从运动与相互作用观点出发,解决以下问题:
a.求小球处于平衡状态时弹簧相对原长的伸长量s;
b.证明小球做简谐运动;
(2)从教科书中我们明白了由v﹣t图象求直线运动位移的思想和方法;从机械能的学习,我们理解了重力做功的特点并进而引入重力势能,由此可以得到重力做功与重力势能变化量之间的关系。图象法和比较法是研究物理问题的重要方法,请你借鉴此方法,从功与能量的观点出发,解决以下问题:
a.小球运动过程中,小球相对平衡位置的位移为x时,证明系统具有的重力势能EpG和弹性势能Ep弹的总和Ep的表达式为Ep=![]() ;
;
b.求小球在振动过程中,运动到平衡位置O点下方距离为![]() 时的动能Ek.并根据小球运动过程中速度v与相对平衡位置的位移x的关系式,画出小球运动的全过程中速度随振动位移变化的v﹣x图象。
时的动能Ek.并根据小球运动过程中速度v与相对平衡位置的位移x的关系式,画出小球运动的全过程中速度随振动位移变化的v﹣x图象。
![]()
【名师解析】
(1)a.对小球,由平衡条件mg=ks。
b.设小球偏离平衡位置x时的回复力为F回=mg﹣k(s+x)=﹣kx,故小球做简谐运动。
(2)a.重力势能EpG=﹣mgx
以平衡位置处弹性势能为0,从平衡位置(弹簧伸长量为s)到坐标为x处(弹簧伸长量为s+x),根据弹簧弹力特点做出F﹣x图线如图,弹簧弹力做功为![]() ,
,
设x坐标处的弹性势能为Ep弹,由弹力做功与弹性势能变化量的关系可知W弹=﹣△Ep弹,即
W弹=﹣(Ep弹﹣0)
得Ep弹=﹣W弹=![]() kx2+ksx=
kx2+ksx=![]() kx2+mgx
kx2+mgx
重力势能Ep电和弹性势能Ep弹的总和Ep=EpG+Ep弹=![]() kx2。
kx2。
b.小球在运动到平衡位置O点下方距离为![]() 时的势能
时的势能![]()
小球在振幅处的动能为零,依据能量守恒定律有![]()
可得,![]() 。
。
由能量守恒定律Ep+Ek=Epmax+Ekmin,即![]() kx2+
kx2+![]() mv2=
mv2=![]() kA2,也即kx2+mv2=kA2
kA2,也即kx2+mv2=kA2
整理得:。
故v﹣x图是椭圆。
故答案为:(1)a.![]() ;b.见解析。
;b.见解析。
(2)a.见解析。b.![]() ;见解析。
;见解析。
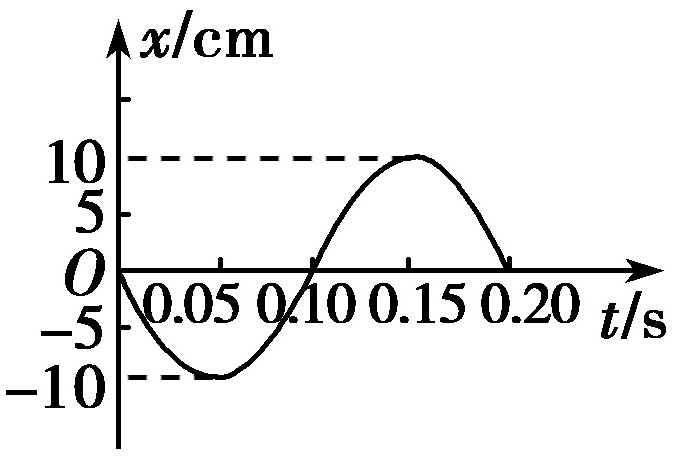
3.有一弹簧振子在水平方向上的B、C之间做简谐运动,已知B、C间的距离为20cm,振子在2s内完成了10次全振动。若从某时刻振子经过平衡位置时开始计时(t=0),经过周期振子有正向最大加速度。
(1)求振子的振幅和周期;
(2)在图中作出该振子的位移—时间图象;
(3)写出振子的振动方程。
题目解答
答案
【名师解析】 (1)振幅A=10cm,
T=s=0.2s。
(2)振子在![]() 周期时具有正的最大加速度,故有负向最大位移,其位移—时间图象如图所示。
周期时具有正的最大加速度,故有负向最大位移,其位移—时间图象如图所示。
(3)设振动方程为y=Asin(ωt+φ)
当t=0时,y=0,则sinφ=0
得φ=0或φ=π,当再过较短时间,y为负值,
所以φ=π
所以振动方程为y=10sin(10πt+π)cm。
答案: (1)10cm 0.2s (2)图见解析 (3)y=10sin(10πt+π)cm