题目
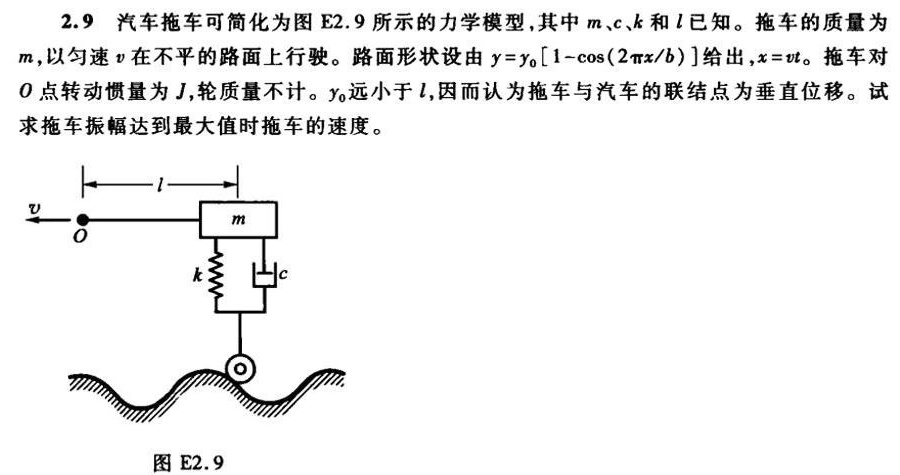
2.9 汽车拖车可简化为图E2.9所示的力学模型,其中m、c、k和l已知。拖车的质量为-|||-m,以匀速v在不平的路面上行驶。路面形状设由 =(y)_(0)[ 1-cos (2pi x,b)] 给出, =vt 拖车对-|||-O点转动惯量为J轮质量不计。y0远小于l,因而认为拖车与汽车的联结点为垂直位移。试-|||-求拖车振幅达到最大值时拖车的速度。-|||-l-|||-U __ m-|||-o-|||-k c-|||-777.-|||-图E2.9
题目解答
答案

解析
步骤 1:确定拖车的运动方程
拖车的运动方程可以由牛顿第二定律和转动惯量的定义得到。拖车受到的力包括弹簧力、阻尼力和路面不平引起的力。设拖车的位移为 $y$,则有:
$$
J\ddot{\theta} = -k(y - y_0) - c\dot{y} + mgy_0\sin(\theta)
$$
其中,$J$ 是拖车对 O 点的转动惯量,$\theta$ 是拖车的旋转角度,$y_0$ 是路面不平引起的位移,$m$ 是拖车的质量,$g$ 是重力加速度。由于 $y_0$ 远小于 $l$,可以认为 $\sin(\theta) \approx \theta$,则有:
$$
J\ddot{\theta} = -k(y - y_0) - c\dot{y} + mgy_0\theta
$$
步骤 2:将位移 $y$ 与旋转角度 $\theta$ 联系起来
由于拖车的位移 $y$ 与旋转角度 $\theta$ 有关,可以将 $y$ 表示为 $\theta$ 的函数。设拖车的位移 $y$ 为:
$$
y = l\theta
$$
则有:
$$
\dot{y} = l\dot{\theta}
$$
$$
\ddot{y} = l\ddot{\theta}
$$
步骤 3:将位移 $y$ 与旋转角度 $\theta$ 的关系代入运动方程
将 $y = l\theta$ 代入运动方程,得到:
$$
J\ddot{\theta} = -kl\theta - cl\dot{\theta} + mgy_0\theta
$$
步骤 4:求解拖车振幅达到最大值时的速度
当拖车振幅达到最大值时,拖车的旋转角度 $\theta$ 达到最大值,此时拖车的速度 $v$ 为:
$$
v = \frac{b\omega_n}{4\pi r_5}\sqrt{\sqrt{1+8s^2}-1}
$$
其中,$\omega_n = l\sqrt{\frac{k}{m}}$,$r_5 = \frac{k}{2\sqrt{kl}}$。
拖车的运动方程可以由牛顿第二定律和转动惯量的定义得到。拖车受到的力包括弹簧力、阻尼力和路面不平引起的力。设拖车的位移为 $y$,则有:
$$
J\ddot{\theta} = -k(y - y_0) - c\dot{y} + mgy_0\sin(\theta)
$$
其中,$J$ 是拖车对 O 点的转动惯量,$\theta$ 是拖车的旋转角度,$y_0$ 是路面不平引起的位移,$m$ 是拖车的质量,$g$ 是重力加速度。由于 $y_0$ 远小于 $l$,可以认为 $\sin(\theta) \approx \theta$,则有:
$$
J\ddot{\theta} = -k(y - y_0) - c\dot{y} + mgy_0\theta
$$
步骤 2:将位移 $y$ 与旋转角度 $\theta$ 联系起来
由于拖车的位移 $y$ 与旋转角度 $\theta$ 有关,可以将 $y$ 表示为 $\theta$ 的函数。设拖车的位移 $y$ 为:
$$
y = l\theta
$$
则有:
$$
\dot{y} = l\dot{\theta}
$$
$$
\ddot{y} = l\ddot{\theta}
$$
步骤 3:将位移 $y$ 与旋转角度 $\theta$ 的关系代入运动方程
将 $y = l\theta$ 代入运动方程,得到:
$$
J\ddot{\theta} = -kl\theta - cl\dot{\theta} + mgy_0\theta
$$
步骤 4:求解拖车振幅达到最大值时的速度
当拖车振幅达到最大值时,拖车的旋转角度 $\theta$ 达到最大值,此时拖车的速度 $v$ 为:
$$
v = \frac{b\omega_n}{4\pi r_5}\sqrt{\sqrt{1+8s^2}-1}
$$
其中,$\omega_n = l\sqrt{\frac{k}{m}}$,$r_5 = \frac{k}{2\sqrt{kl}}$。