题目
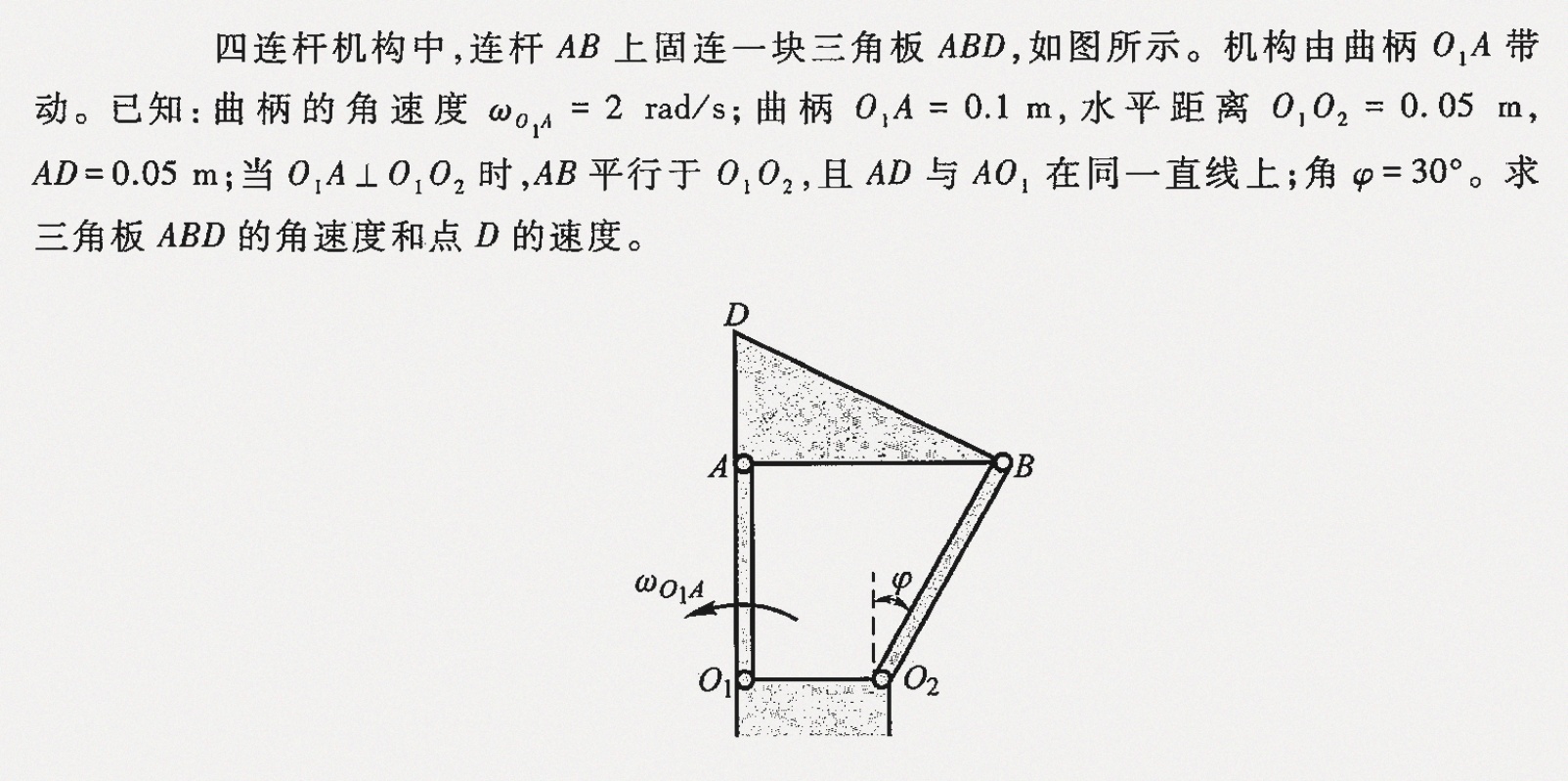
四连杆机构中,连杆AB上固连一块三角板A BD,如图所示。机构由曲柄01 A带-|||-动。已知:曲柄的角速度 (omega )_({O)_(1)A}=2rad/s; 曲柄 _(1)A=0.1m, 水平距离 _(1)(O)_(2)=0.05m,-|||-=0.05m; 当 _(1)Abot (O)_(1)(O)_(2) 时,AB平行于O1O 2,且AD与AO1在同一直线上;角 varphi =(30)^circ 求-|||-三角板ABD的角速度和点D的速度。-|||-D-|||-A B-|||-WO1A φ-|||-O1 O2
题目解答
答案
解析
步骤 1:确定三角板ABD的速度瞬心
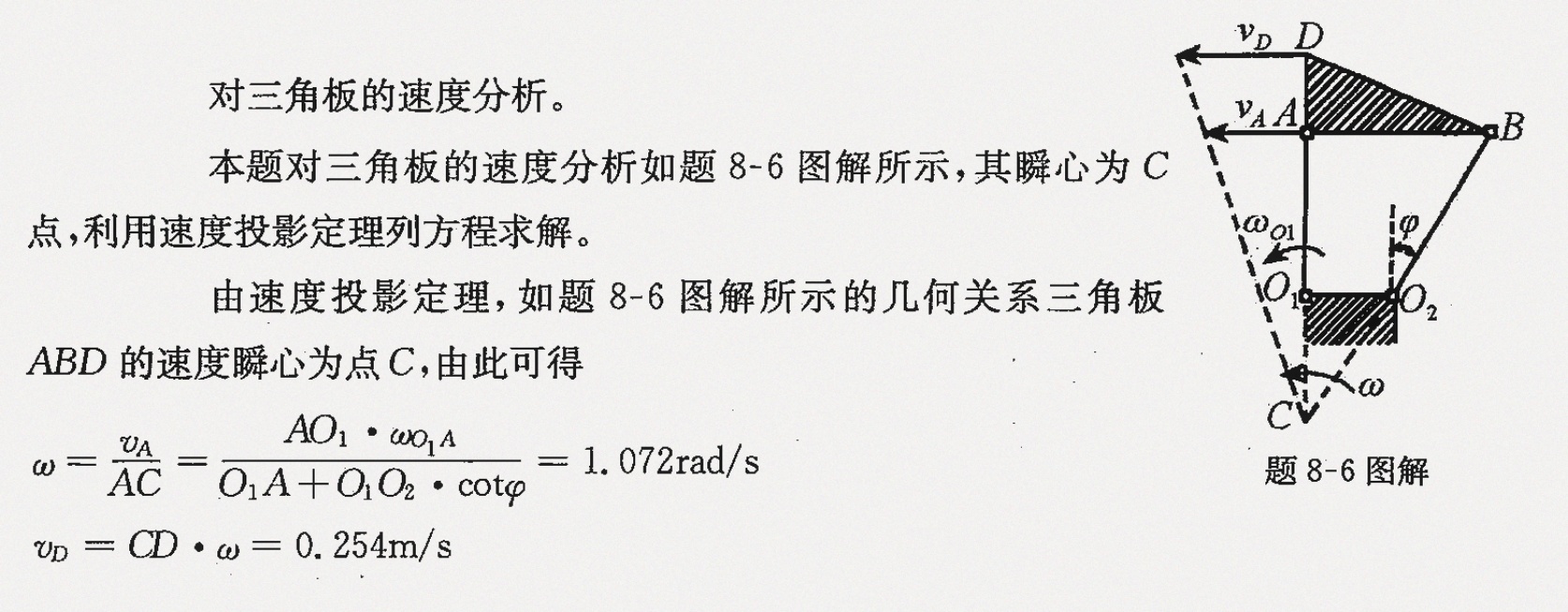
三角板ABD的速度瞬心为点C,即三角板ABD绕点C旋转。由于AB平行于O1O2,且AD与AO1在同一直线上,因此点C位于AB延长线上,且垂直于AB。
步骤 2:计算点A的速度
点A的速度由曲柄O1A的角速度和长度决定。根据公式 ${v}_{A}={\omega }_{{O}_{1}A}\cdot {O}_{1}A$,可以计算出点A的速度。
${v}_{A}=2rad/s\cdot 0.1m=0.2m/s$
步骤 3:计算三角板ABD的角速度
根据速度投影定理,点A的速度在AC方向上的投影等于AC乘以角速度。因此,可以计算出三角板ABD的角速度。
$\omega =\dfrac {{v}_{A}}{AC}=\dfrac {0.2m/s}{0.1m+0.05m\cdot \cos {30}^{\circ }}=1.072rad/s$
步骤 4:计算点D的速度
点D的速度由三角板ABD的角速度和CD的长度决定。根据公式 ${v}_{D}=\omega \cdot CD$,可以计算出点D的速度。
${v}_{D}=1.072rad/s\cdot 0.05m\cdot \sin {30}^{\circ }=0.254m/s$
三角板ABD的速度瞬心为点C,即三角板ABD绕点C旋转。由于AB平行于O1O2,且AD与AO1在同一直线上,因此点C位于AB延长线上,且垂直于AB。
步骤 2:计算点A的速度
点A的速度由曲柄O1A的角速度和长度决定。根据公式 ${v}_{A}={\omega }_{{O}_{1}A}\cdot {O}_{1}A$,可以计算出点A的速度。
${v}_{A}=2rad/s\cdot 0.1m=0.2m/s$
步骤 3:计算三角板ABD的角速度
根据速度投影定理,点A的速度在AC方向上的投影等于AC乘以角速度。因此,可以计算出三角板ABD的角速度。
$\omega =\dfrac {{v}_{A}}{AC}=\dfrac {0.2m/s}{0.1m+0.05m\cdot \cos {30}^{\circ }}=1.072rad/s$
步骤 4:计算点D的速度
点D的速度由三角板ABD的角速度和CD的长度决定。根据公式 ${v}_{D}=\omega \cdot CD$,可以计算出点D的速度。
${v}_{D}=1.072rad/s\cdot 0.05m\cdot \sin {30}^{\circ }=0.254m/s$