题目
在图示曲柄连杆机构中,曲柄OA绕O轴转动,其角速度为ωO,角加速度为αO。在某瞬时曲柄与水平线间成60°角,而连杆AB与曲柄OA垂直。滑块B在圆形槽内滑动,此时半径O1B与连杆AB间成30°角。如OA=r,=2sqrt (3),O1B=2r,求在该瞬时,滑块B的切向和法向加速度。=2sqrt (3)
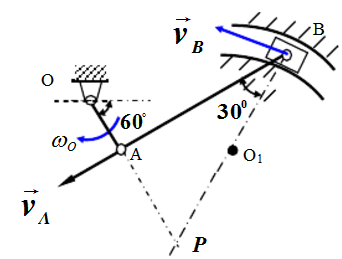
在图示曲柄连杆机构中,曲柄OA绕O轴转动,其角速度为ωO,角加速度为αO。在某瞬时曲柄与水平线间成60°角,而连杆AB与曲柄OA垂直。滑块B在圆形槽内滑动,此时半径O1B与连杆AB间成30°角。如OA=r,![]() ,O1B=2r,求在该瞬时,滑块B的切向和法向加速度。
,O1B=2r,求在该瞬时,滑块B的切向和法向加速度。
题目解答
答案
答案:滑块B的切向和法向加速度分别为:aBn=2rω02,aBt=r·(2α0-√3ω02)
解析:曲柄0A上点A的速度和加速度为
vA=rω0;aAn=rω02,aAt=rα0
以点A为基点分析杆AB上点B的速度与加速度,如图b、图c所示,则点B的速度为
vB=vA/sin30°=2rω0
且:vBA=vBcos30°=√3rω0
将:aB=aBt+aBn=aAn+aAt+aBAt+aBAn
分别向轴n,轴t投影,得:
aBn=aAtcos30°+aBnAcos30°-aBtAsin30°-aAnsin 30°(1)
aBt=aAtsin30°+aBnAsin30°+aBtAcos30°+aAncos30°(2)
将:aBt=vB2/O1B=2rω02,aBAn=aAB2/AB=√3/2rω02
代入式(1)、 (2),解得
aBt=r·(2α0-√3ω02)
因此滑块B的加速度为
aBn=2rω02,aBt=r·(2α0-√3ω02)
![]()
解析
步骤 1:确定点A的速度和加速度
曲柄OA绕O轴转动,其角速度为ωO,角加速度为αO。因此,点A的速度和加速度分别为:
v_A=rω_0;a_A^{n}=rω_0^{2},a_A^{t}=rα_0
步骤 2:分析点B的速度
以点A为基点分析杆AB上点B的速度,由于连杆AB与曲柄OA垂直,且半径O1B与连杆AB间成30°角,因此点B的速度为:
v_B=v_A/sin30°=2rω_0
步骤 3:分析点B的加速度
将点B的加速度分解为切向和法向加速度,即:
a_B=a_B^{t}+a_B^{n}=a_A^{n}+a_A^{t}+a_BA^{t}+a_BA^{n}
分别向轴n,轴t投影,得:
a_B^{n}=a_A^{t}cos30°+a_B^{n}Acos30°-a_B^{t}Asin30°-a_A^{n}sin 30°(1)
a_B^{t}=a_A^{t}sin30°+a_B^{n}Asin30°+a_B^{t}Acos30°+a_A^{n}cos30°(2)
步骤 4:计算点B的切向和法向加速度
将:a_B^{t}=v_B^{2}/O_1B=2rω_0^{2},a_BA^{n}=a_AB^{2}/AB=√3/2rω_0^{2}
代入式(1)、 (2),解得
a_B^{t}=r·(2α_0-√3ω_0^{2})
因此滑块B的加速度为
a_B^{n}=2rω_0^{2},a_B^{t}=r·(2α_0-√3ω_0^{2})
曲柄OA绕O轴转动,其角速度为ωO,角加速度为αO。因此,点A的速度和加速度分别为:
v_A=rω_0;a_A^{n}=rω_0^{2},a_A^{t}=rα_0
步骤 2:分析点B的速度
以点A为基点分析杆AB上点B的速度,由于连杆AB与曲柄OA垂直,且半径O1B与连杆AB间成30°角,因此点B的速度为:
v_B=v_A/sin30°=2rω_0
步骤 3:分析点B的加速度
将点B的加速度分解为切向和法向加速度,即:
a_B=a_B^{t}+a_B^{n}=a_A^{n}+a_A^{t}+a_BA^{t}+a_BA^{n}
分别向轴n,轴t投影,得:
a_B^{n}=a_A^{t}cos30°+a_B^{n}Acos30°-a_B^{t}Asin30°-a_A^{n}sin 30°(1)
a_B^{t}=a_A^{t}sin30°+a_B^{n}Asin30°+a_B^{t}Acos30°+a_A^{n}cos30°(2)
步骤 4:计算点B的切向和法向加速度
将:a_B^{t}=v_B^{2}/O_1B=2rω_0^{2},a_BA^{n}=a_AB^{2}/AB=√3/2rω_0^{2}
代入式(1)、 (2),解得
a_B^{t}=r·(2α_0-√3ω_0^{2})
因此滑块B的加速度为
a_B^{n}=2rω_0^{2},a_B^{t}=r·(2α_0-√3ω_0^{2})