第四章 平面一般力系4-1 已知F1=60N,F2=80N,F3=150N,m=100N.m,转向为逆时针,θ=30°图中距离单位为m。试求图中力系向O点简化结果及最终结果。
第四章 平面一般力系
4-1 已知F1=60N,F2=80N,F3=150N,m=100N.m,转向为逆时针,θ=30°图中距离单位为m。试求图中力系向O点简化结果及最终结果。
题目解答
答案
解: 



 ∴α=196°42′
∴α=196°42′
 (顺时针转向)
(顺时针转向)
故向O点简化的结果为:
由于FR′≠0,L≠0,故力系最终简化结果为一合力 ,
, 大小和方向与主矢
大小和方向与主矢 相同,合力FR的作用线距O点的距离为d。
相同,合力FR的作用线距O点的距离为d。
FR=FR=52.1N
d=L0/FR=5.37m
4-2 已知物体所受力系如图所示,F=10Kn,m=20kN.m,转向如图。
(a)若选择x轴上B点为简化中心,其主矩LB=10kN.m,转向为顺时针,试求B点的位置及主矢R’。
(b)若选择CD线上E点为简化中心,其主矩LE=30kN.m,转向为顺时针,α=45°,试求位于CD直线上的E点的位置及主矢R’。
提示:横管简化成三支点的静不定梁。
答:
 在距离两端的处。
在距离两端的处。
6-13在车床加工工件,已知工件的弹性模量E=220GP a,试问(1)按图(a)方式加工时,因工件而引起的直径误差是多少?
(2)如在工件自由端加上顶尖 后,按车刀行至工作中点时考虑(b),这时因工件变形而引起的直径误差又是多少?(3)二
者误差的百分比如何?
提示:(a)情形可简化成在右端作用一集中力P的静定是悬臂梁,(b)情形可简化成左端固定右端简支的静不定梁,在中点作
用一集中力P。计算直径的误差时,应是所求得挠度的二倍。
答:(1)二者误差百分比为2.73%
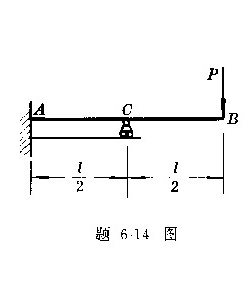
6-14、悬臂梁AB因强度和刚度不足,用同材料同截面的一根短梁AC加固,如图所示。问(1)支座C处的反力为多
少?(2)梁AB的最大弯矩和最大挠度要比没有梁 AC支撑时减少多少?
解:(1)计算约束反力
根据在加固处两个悬臂梁的挠度相等这个变形条件,来计算约束反力 。即
。即
可得
(2) 比较最大弯矩
没有加固梁时,
有加固时,
比较可知,梁AB加固后,最大弯矩可减少一半。
(3) 比较最大挠度
没有加固梁时,
有加固时,
经加固后,梁AB在右端的最大挠度要减少
6-15、图示一铣床齿轮轴AB,已知传动功率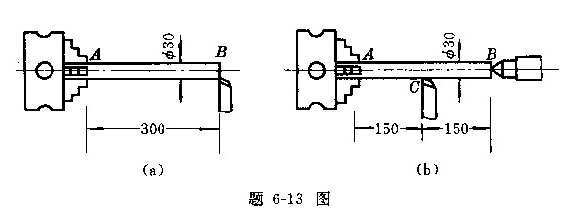 ,转速n=230rpm,D轮为主动轮。若仅考虑齿轮切向力的影响,试求此
,转速n=230rpm,D轮为主动轮。若仅考虑齿轮切向力的影响,试求此
轴的弯矩图。
解:

(1) 计算AB轴上的外力
AB轴上的外力偶矩
作用于AB轴的左右齿轮上的切向力为
(2) 求AB轴上的约束反力
AB轴是一次静不定梁,取静定基如图(b),变形条件为
而
代入有关数据,再代回变形条件中,可得
由平衡条件,
(3) 作弯矩图
AB轴的弯矩图如图(c) 。
。