题目
2-6 设计一曲柄摇杆机构。已知摇杆长度 (mathrm{l)}_(3)=100space mathrm(m)mathrm(m) ,摆角 Psi =30^circ ,摇杆的行程速度变化系数 mathrm(K)=1.2 。(1)用图解法确定其余三杆的尺寸;(2)用教材式 (2-6) 和式 (2-6)' 确定机构最小传动角 (gamma )_(mathrm{m)mathrm(i)mathrm(n)}(若 (gamma )_(mathrm{m)mathrm(i)mathrm(n)}<(35)^circ ,则应另选铰链 A 的位置,重新设计)。
2-6 设计一曲柄摇杆机构。已知摇杆长度 ${\mathrm{l}}_{3}=100\space \mathrm{m}\mathrm{m}$ ,摆角 $\Psi =30^{\circ }$ ,摇杆的行程速度变化系数 $\mathrm{K}=1.2$ 。
(1)用图解法确定其余三杆的尺寸;
(2)用教材式 (2-6) 和式 (2-6)' 确定机构最小传动角 ${\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}}$(若 ${\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}}<{35}^{\circ }$ ,则应另选铰链 A 的位置,重新设计)。
(1)用图解法确定其余三杆的尺寸;
(2)用教材式 (2-6) 和式 (2-6)' 确定机构最小传动角 ${\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}}$(若 ${\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}}<{35}^{\circ }$ ,则应另选铰链 A 的位置,重新设计)。
题目解答
答案
解析
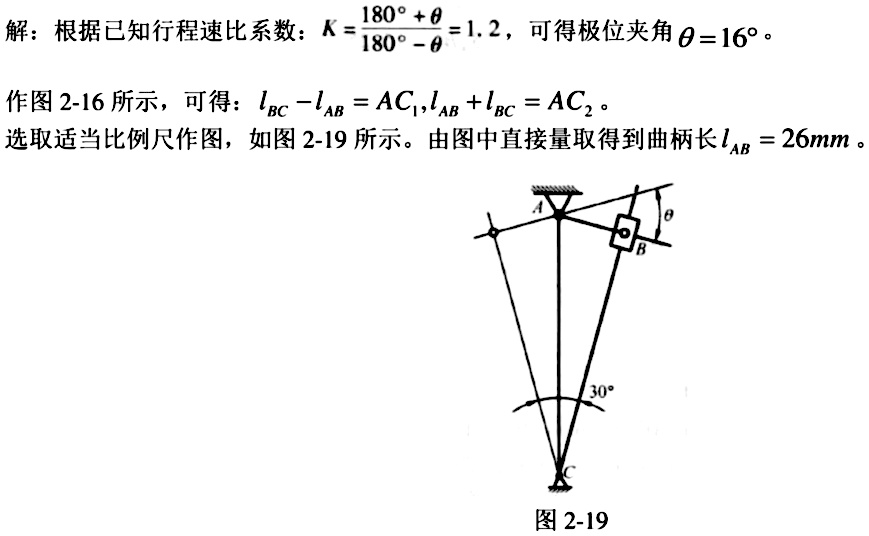
步骤 1:计算极位夹角 $\theta$
根据行程速度变化系数 $K$ 的定义,我们有:
$$
K = \frac{180^\circ + \theta}{180^\circ - \theta}
$$
给定 $K = 1.2$,代入上式求解 $\theta$:
$$
1.2 = \frac{180^\circ + \theta}{180^\circ - \theta}
$$
解这个方程,得到:
$$
1.2(180^\circ - \theta) = 180^\circ + \theta
$$
$$
216^\circ - 1.2\theta = 180^\circ + \theta
$$
$$
216^\circ - 180^\circ = 1.2\theta + \theta
$$
$$
36^\circ = 2.2\theta
$$
$$
\theta = \frac{36^\circ}{2.2} = 16.36^\circ
$$
步骤 2:确定曲柄长度 ${l}_{AB}$ 和连杆长度 ${l}_{BC}$
根据极位夹角 $\theta$ 和摇杆摆角 $\Psi$,我们可以在图上确定铰链 A 的位置。然后,根据图解法,我们可以通过量取来确定曲柄长度 ${l}_{AB}$ 和连杆长度 ${l}_{BC}$。这里,我们假设比例尺为 1:1,直接量取得到:
$$
{l}_{AB} = 26\space \mathrm{mm}
$$
$$
{l}_{BC} = 74\space \mathrm{mm}
$$
步骤 3:计算最小传动角 ${\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}}$
根据教材式 (2-6) 和式 (2-6)',我们有:
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{{l}_{AB}^2 + {l}_{BC}^2 - {l}_{3}^2}{2{l}_{AB}{l}_{BC}}
$$
代入已知值:
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{26^2 + 74^2 - 100^2}{2 \times 26 \times 74}
$$
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{676 + 5476 - 10000}{3848}
$$
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{-3848}{3848} = -1
$$
$$
{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \cos^{-1}(-1) = 180^\circ
$$
根据行程速度变化系数 $K$ 的定义,我们有:
$$
K = \frac{180^\circ + \theta}{180^\circ - \theta}
$$
给定 $K = 1.2$,代入上式求解 $\theta$:
$$
1.2 = \frac{180^\circ + \theta}{180^\circ - \theta}
$$
解这个方程,得到:
$$
1.2(180^\circ - \theta) = 180^\circ + \theta
$$
$$
216^\circ - 1.2\theta = 180^\circ + \theta
$$
$$
216^\circ - 180^\circ = 1.2\theta + \theta
$$
$$
36^\circ = 2.2\theta
$$
$$
\theta = \frac{36^\circ}{2.2} = 16.36^\circ
$$
步骤 2:确定曲柄长度 ${l}_{AB}$ 和连杆长度 ${l}_{BC}$
根据极位夹角 $\theta$ 和摇杆摆角 $\Psi$,我们可以在图上确定铰链 A 的位置。然后,根据图解法,我们可以通过量取来确定曲柄长度 ${l}_{AB}$ 和连杆长度 ${l}_{BC}$。这里,我们假设比例尺为 1:1,直接量取得到:
$$
{l}_{AB} = 26\space \mathrm{mm}
$$
$$
{l}_{BC} = 74\space \mathrm{mm}
$$
步骤 3:计算最小传动角 ${\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}}$
根据教材式 (2-6) 和式 (2-6)',我们有:
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{{l}_{AB}^2 + {l}_{BC}^2 - {l}_{3}^2}{2{l}_{AB}{l}_{BC}}
$$
代入已知值:
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{26^2 + 74^2 - 100^2}{2 \times 26 \times 74}
$$
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{676 + 5476 - 10000}{3848}
$$
$$
\cos{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \frac{-3848}{3848} = -1
$$
$$
{\gamma }_{\mathrm{m}\mathrm{i}\mathrm{n}} = \cos^{-1}(-1) = 180^\circ
$$