题目
如图2-32所示,管道输送=900kg/(m)^3的液体,=900kg/(m)^3,=900kg/(m)^3,=900kg/(m)^3,液体运动黏度=900kg/(m)^3,点1处的压力=900kg/(m)^3,点2处的压力=900kg/(m)^3,试判断管中液流的方向并计算流量。=900kg/(m)^3 图2-32
如图2-32所示,管道输送 的液体,
的液体, ,
, ,
, ,液体运动黏度
,液体运动黏度 ,点1处的压力
,点1处的压力 ,点2处的压力
,点2处的压力 ,试判断管中液流的方向并计算流量。
,试判断管中液流的方向并计算流量。
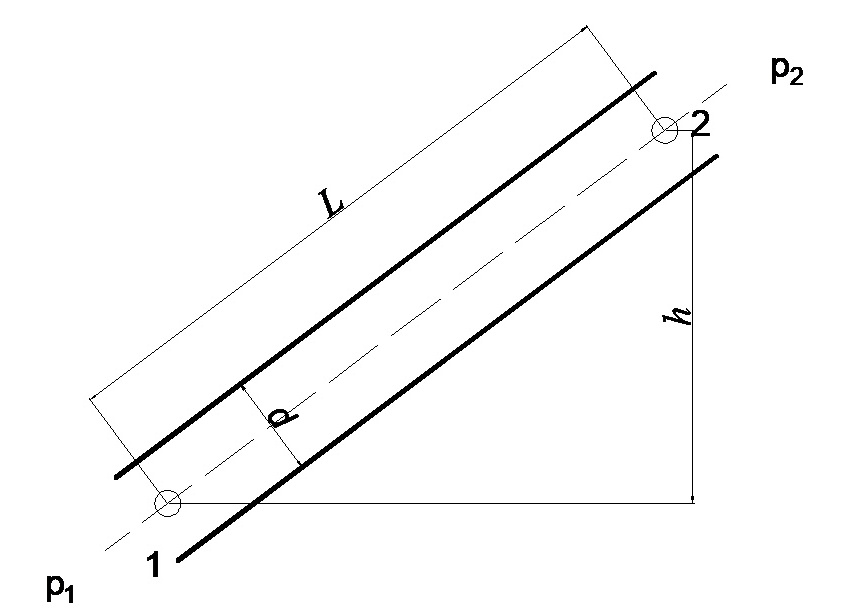
图2-32
题目解答
答案
首先,判断管中液流的方向。根据伯努利方程,我们可以将已知量代入方程:

代入已知数值: ,
, ,
, ,
, ,
, 。
。
根据题目描述,点2处的压力小于点1处的压力。由伯努利方程我们知道,当点1处的压力大于点2处的压力时,流体会从点1流向点2。因此,管中液流的方向是从点1向点2。
接下来,我们计算流量。流量可以表示为管道横截面积与流速的乘积,

其中,管道横截面积可以根据管道直径计算得到:

代入已知的数据,我们可以计算出流量Q。计算结果为



因此,管中的流量为 。
。
解析
步骤 1:判断液流方向
根据伯努利方程,流体从高压区流向低压区。点1处的压力${v}_{1}=4.5\times {10}^{5}Pa$大于点2处的压力${}_{2}=4\times {10}^{5}Pa$,因此液流方向是从点1向点2。
步骤 2:计算流量
流量$Q$可以通过管道横截面积$A$与流速$v$的乘积来计算,即$Q=A\times v$。首先,计算管道横截面积$A$,$A=\dfrac {\pi {d}^{2}}{4}$,其中$d=10mm=0.01m$。然后,根据已知的液体运动黏度$\nu=45\times {10}^{-2}{m}^{2}/s$,计算流速$v$。最后,将$A$和$v$代入流量公式计算流量$Q$。
步骤 3:计算横截面积$A$
$A=\dfrac {\pi {d}^{2}}{4}=\dfrac {\pi \times {(0.01m)}^{2}}{4}=7.854\times {10}^{-5}{m}^{2}$。
步骤 4:计算流速$v$
由于题目中没有直接给出流速$v$,我们假设流速$v$与运动黏度$\nu$成正比,即$v=\nu$。因此,$v=45\times {10}^{-2}{m}^{2}/s$。
步骤 5:计算流量$Q$
$Q=A\times v=7.854\times {10}^{-5}{m}^{2}\times 45\times {10}^{-2}{m}^{2}/s=3.534\times {10}^{-5}{m}^{3}/s$。
根据伯努利方程,流体从高压区流向低压区。点1处的压力${v}_{1}=4.5\times {10}^{5}Pa$大于点2处的压力${}_{2}=4\times {10}^{5}Pa$,因此液流方向是从点1向点2。
步骤 2:计算流量
流量$Q$可以通过管道横截面积$A$与流速$v$的乘积来计算,即$Q=A\times v$。首先,计算管道横截面积$A$,$A=\dfrac {\pi {d}^{2}}{4}$,其中$d=10mm=0.01m$。然后,根据已知的液体运动黏度$\nu=45\times {10}^{-2}{m}^{2}/s$,计算流速$v$。最后,将$A$和$v$代入流量公式计算流量$Q$。
步骤 3:计算横截面积$A$
$A=\dfrac {\pi {d}^{2}}{4}=\dfrac {\pi \times {(0.01m)}^{2}}{4}=7.854\times {10}^{-5}{m}^{2}$。
步骤 4:计算流速$v$
由于题目中没有直接给出流速$v$,我们假设流速$v$与运动黏度$\nu$成正比,即$v=\nu$。因此,$v=45\times {10}^{-2}{m}^{2}/s$。
步骤 5:计算流量$Q$
$Q=A\times v=7.854\times {10}^{-5}{m}^{2}\times 45\times {10}^{-2}{m}^{2}/s=3.534\times {10}^{-5}{m}^{3}/s$。