题目
1-8 试画出图a和图b两种情形下各构件的受力图,并加以比较。-|||-F-|||-A-|||-C B-|||-D-|||-(a)-|||-F-|||-A-|||-C B-|||-D-|||-(b)
题目解答
答案
解析
考查要点:本题主要考查学生对受力图绘制及结构支座反力分析的能力,需结合静力学平衡条件进行分析。
解题核心思路:
- 明确结构类型:区分两图中构件的连接方式(如铰链、刚性连接)及支座类型(固定支座、滚动支座)。
- 确定受力方向:根据约束类型判断支座反力方向,注意作用力与反作用力成对出现。
- 平衡条件应用:通过ΣFx=0、ΣFy=0建立方程,分析反力大小关系。
破题关键点:
- 支座反力方向差异:两图中支座位置或连接方式不同,导致FA、FRD方向不同。
- 内力传递路径:结构形式不同会影响力的传递,进而改变反力大小。
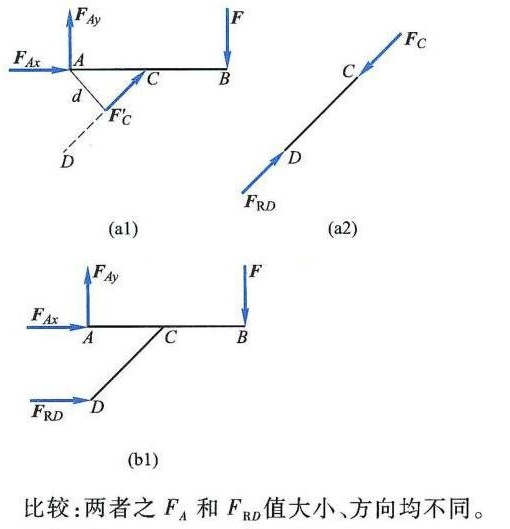
图(a)受力分析
构件A
- 支座反力:A为固定支座,存在水平反力FAx和竖向反力FAy。
- 内力:构件A与C接触,产生法向反力Fc(方向待定)。
构件C
- 作用力:受A的反作用力F'c(与Fc大小相等、方向相反)。
- 传递:力通过C传递至D点,产生反力FRD。
平衡条件
- ΣFx=0:FAx = F'c的水平分量。
- ΣFy=0:FAy + F'c的竖向分量 = 外载荷F。
图(b)受力分析
构件A
- 支座反力:A仍为固定支座,但结构改变导致FAx、FAy方向可能与图(a)不同。
构件D
- 反力FRD:由于结构连接方式变化,FRD方向与图(a)相反,大小不同。
平衡条件
- ΣFx=0:FAx = 新路径中的水平分量。
- ΣFy=0:FAy + 新路径中的竖向分量 = 外载荷F。
比较结论:
- FA方向:图(a)中FA斜向支撑,图(b)中FA可能竖直向上。
- FRD大小与方向:图(a)中FRD为压力,图(b)中可能为拉力,且数值不同。