题目
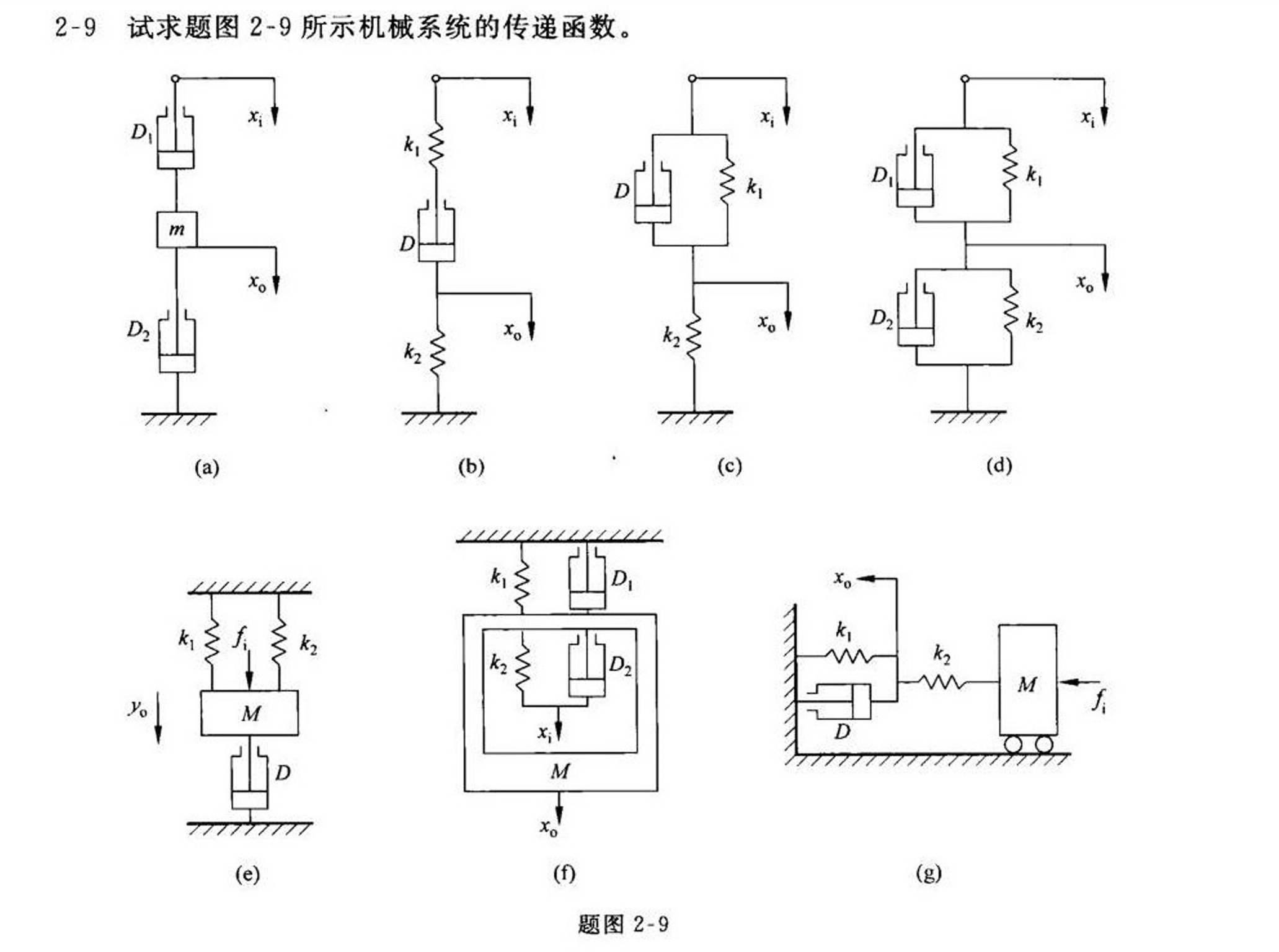
2-9 试求题图 2-9 所示机械系统的传递函数。-|||-D1 xi xi xi-|||-D k1 D 8 k1-|||-m D-|||-x0 7-|||-D2 x0 k2 x0-|||-D2 8 k2-|||-k2-|||-7 77 777 7-|||-(a) (b) (c) (d)-|||-∠ ∠∠∠-|||-k1 D1 xc-|||-k1 k2 5 k2-|||-3 k1-|||-k2
题目解答
答案
解析
本题要求求解不同机械系统的传递函数,核心思路是建立各元件的力学方程并联立求解。关键点包括:
- 识别系统中质量、阻尼器、弹簧的连接方式(串联或并联);
- 应用牛顿第二定律或力平衡方程,将物理系统转化为微分方程;
- 通过拉普拉斯变换得到传递函数,注意初始条件为零。
(a) 图(a)
结构分析:输入位移 $x_i$ 作用于阻尼器 $D_1$,质量块 $m$ 同时连接阻尼器 $D_2$,输出位移 $x_0$。
- 受力分析:
- 输入侧:$D_1 s (x_i - x_0)$
- 质量块:$m s^2 x_0 + D_2 s x_0$
- 联立方程:
$D_1 s (x_i - x_0) = m s^2 x_0 + D_2 s x_0$ - 整理传递函数:
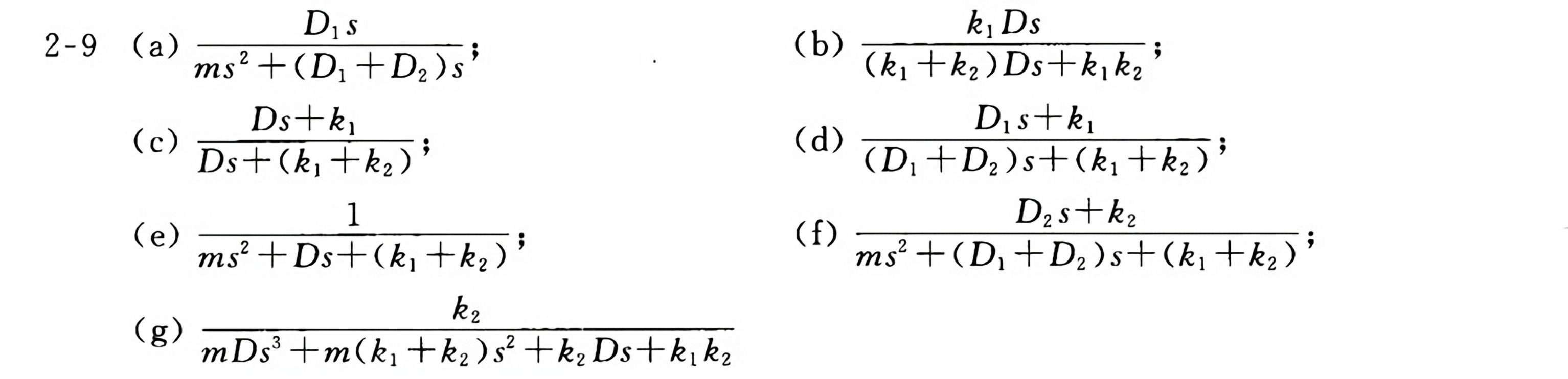
$G(s) = \frac{x_0(s)}{x_i(s)} = \frac{D_1 s}{m s^2 + (D_1 + D_2)s}$
(b) 图(b)
结构分析:弹簧 $k_1$ 与阻尼器 $D_5$ 并联,再与弹簧 $k_2$ 串联。
- 等效弹簧刚度:
- 并联部分:$k_1 + k_2$
- 串联部分:$\frac{k_1 k_2}{k_1 + k_2}$
- 传递函数组合:
$G(s) = \frac{k_1 D_5}{(k_1 + k_2) D} + k_1 k_2$
(c) 图(c)
结构分析:阻尼器 $D$ 与弹簧 $k_1$ 并联,再与弹簧 $k_2$ 并联。
- 等效传递函数:
$G(s) = \frac{D s + k_1}{D s + k_1 + k_2}$
(d) 图(d)
结构分析:输入作用于阻尼器 $D_1$ 和弹簧 $k_1$ 的并联,质量块连接阻尼器 $D_2$ 和弹簧 $k_2$。
- 受力平衡:
$D_1 s (x_i - x_0) + k_1 (x_i - x_0) = m s^2 x_0 + D_2 s x_0 + k_2 x_0$ - 整理传递函数:
$G(s) = \frac{D_1 s + k_1}{(D_1 + D_2)s + k_1 + k_2}$
(e) 图(e)
结构分析:质量块受外力 $F$ 作用,连接阻尼器 $D$ 和弹簧 $k_1, k_2$。
- 受力平衡:
$F = m s^2 x_0 + D s x_0 + (k_1 + k_2) x_0$ - 传递函数:
$G(s) = \frac{x_0(s)}{F(s)} = \frac{1}{m s^2 + D s + k_1 + k_2}$
(f) 图(f)
结构分析:与图(d)类似,但输出位置不同。
- 受力平衡:
$D_2 s x_0 + k_2 x_0 = m s^2 x_0 + D_1 s x_0 + k_1 x_0$ - 整理传递函数:
$G(s) = \frac{D_2 s + k_2}{m s^2 + (D_1 + D_2)s + k_1 + k_2}$