-16. 试计算图示各机构的自由度。图a、d为齿轮—连杆[1]组合机构;图b为凸轮[2]—连杆组合机构(图中在D处为铰接在一起的两个滑块);图c为一精压机机构。并问在图d所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?解A. 分析:A为复合铰链,不存在局部自由度和虚约束。 B. =3n-(2pL+pH)=3×4-(2×5+1)=1 C. =3n-(2pL+pH-p')-F'=3×4-(2×5+1-0)-0=1 D. E为局部自由度。 E. =3n-(2pL+pH)=3×5-(2×6+2)=1 F. =3n-(2pL+pH-p')-F'=3×7-(2×8+2-0)-2=1 G. 处虽存在轨迹重合的问题,但由于D处相铰接的双滑块为一个Ⅱ级杆组,未引入约束,故机构不存在虚约束。如果将相铰接的双滑块改为相固联的十字滑块,则该机构就存在一个虚约束。BCDE就可以了,而其余部分为重复部分,则引入了虚约束。=3n-(2pL+pH)=3×5-(2×7+0)=1=3n-(2pL+pH-p')-F'=3×11-(2×17+0-2)-0=1为复合铰链;处高副的数目为2。不存在局部自由度和虚约束。=3n-(2pL+pH)=3×6-(2×7+3)=1=3n-(2pL+pH-p')-F'=3×6-(2×7+3-0)-0=1齿轮3与5的中心距受到约束,轮齿两侧齿廓只有一侧接触,另一侧存在间隙,故齿轮高副提供一个约束。齿条7与齿轮5的中心距没有受到约束,两齿轮的中心可以彼此靠近,使轮齿两侧齿廓均接触,因轮齿两侧接触点处的法线方向并不重合,故齿轮高副提供两个约束。d/s,φ=165º,试用瞬心法求:的速度vL;C线上(或其延长线上)速度最小的一点E的位置及其速度的大小;(T)-|||-、 ,(T)-|||-、 ,当vC=0时,φ角之值(有两个解)。解P12在A点,P23在B点,P34在C点,P14在D点,P13在直线AB与CD的交点,P24在直线AD与BC的交点)。P24A=3.21cm=32.1 mm, AP13=59.5 mm。P24处速度相同,ω2μL P24A=ω4μL(P24A+AD),P4A/(P2A+AD)P24A/(P24A+AD)=90×10×32.1/(32.1+40)=400.69 mm/s=0.4m/sC线上(或其延长线上)速度最小的一点E,应该距PC最近。如图b所示,过P4作直线BC的垂线,垂足就是点E。PCDE=47.5 mm[μ2(AB+APCD)]= ω24l24/[μ13(AB+AP13)]P13E=ω3lB PLE /(AB+AP13)=10×60×47.5/(20+59.5)=358.49 mm/s=0.358 m/sP2A/(PABA+AD)可知,欲使vL=0,必须有P13A=0,即直线BC通过点A。此时,杆AB与BC重叠或拉直共线。当杆AB与BC重叠共线时(图c),φ=226º;当杆AB与BC拉直共线时(图d),φ=27º。、b)、c)三个位置,F为作用在活塞上的力,转动副A及上所画的虚线小圆为摩擦圆,试决定在此三个位置时作用在连杆AB上的作用力的真实方向(构件重量及惯性力略去不计)。B上的作用力的真实方向如题4-13答图所示。分析OA上M与ω方向相反,所以曲柄OA为从动件,滑块为原动件,F为驱动力,M为工作阻力。连杆AB为二力构件。中,连杆AB受压,FE和F3共线,方向向内。∠OAB减小,ωL为顺时针方向,所以F13切于A处摩擦圆下方。∠ABO增大,ω2为顺时针方向,所以FAB切于处摩擦圆上方。故F13和F13作用线应同时切于A处摩擦圆的下方和B处摩擦圆的上方(如图d所示)。B受压,FC和F4共线,方向向内。∠OAB减小,ωCD为顺时针方向,所以F2切于A处摩擦圆下方。∠ABO减小,ωCD为逆时针方向,所以F24切于处摩擦圆下方。故F24和FC作用线应同时切于A处摩擦圆的下方和B处摩擦圆的下方(如图e所示)。B受拉,F24和FR12共线,方向向外。∠OAB增大,ωR32为顺时针方向,所以F21切于A处摩擦圆上方。∠ABO减小,ωR12为顺时针方向,所以F23切于处摩擦圆下方。故FR32和FR12作用线应同时切于A处摩擦圆的上方和B处摩擦圆的下方(如图f所示)。6-2 动平衡的构件一定是静平衡的,反之亦然,对吗?为什么?在图示的两根曲轴中,设各曲拐的偏心质径积均相等,且各曲拐均在同一轴平面上。试说明两者各处于何种平衡状态?(T)-|||-、 ,解 “静平衡的构件一定是动平衡的”这一说法不正确。因为达到静平衡的构件仅满足了静平衡条件,即各偏心质量(包括平衡质量)产生的惯性力的矢量和为零(T)-|||-、 ,,而这些惯性力所构成的力矩矢量和不一定为零。中,满足(T)-|||-、 ,和(T)-|||-、 ,,所以处于动平衡状态。图b)中,仅满足(T)-|||-、 ,,但(T)-|||-、 ,,所以处于静平衡状态。Md随曲柄转角φ的变化曲线如图所示,其运动周期φT=π,曲柄的平均转速nm=620r/min。当用该内燃机驱动一阻抗力为常数的机械时,如果要求其运转不均匀系数δ=0.01。试求(T)-|||-、 ,(T)-|||-、 ,曲柄最大转速nF和相应的曲柄转角位置φed;Jd(不计其余构件的转动惯量)。Mer=Md 等效阻力矩Mr=常数Wer应等于阻抗功Wr ,即Md·π= Wer=Wer=(π/9)·200/2+(π/6)·200+(13π/18)·200/2=350π/3Med=350/3 N·mMed曲线,如答图a)所示。E=7π/108,由(T)-|||-、 ,得FG=91π/216,EF=π-DE-FG=111π/216M2曲线与等效阻力矩M3曲线之间所围的面积E0面积=-(T)-|||-、 ,=-(T)-|||-、 ,=-3.781πBFE面积=+(T)-|||-、 ,=28.356πGC面积=-(T)-|||-、 ,=-24.576π作能量指示图,如图b)所示,可知:在φ=φ1=7π/108=11.667º处,曲柄有最小转速n2在φ=φ3=125π/216=104.167º处,曲柄有最大转速n4由ωmin=ω1(1+δ/2) ω2=ω1(1-δ/2) 知n2=n1(1+δ/2)=620×(1+0.01/2)=623.1 r/minW2=s1=6125π/216=89.085J2=(T)-|||-、 ,=2.11 kg·m3b、c三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d的取值范围应为何值?解:+b<c+d 满足杆长条件,且最短杆1为连架杆,所以该机构有曲柄。杆1为曲柄。(T)-|||-、 , 因为机构满足杆长条件,所以通过选不同杆为机架的办法获得双曲柄机构。当以最短杆为机架时,获得双曲柄机构。(T)-|||-、 , 欲获得曲柄摇杆机构,应满足以下两个条件:(T)-|||-、 ,杆长条件;(T)-|||-、 ,杆1为最短杆。关于d的取值范围讨论如下。+d≤b+c ,故 d≤b+c-a=760 mm+b≤c+d ,故 d≥a+b-c=440 mm所以欲获得曲柄摇杆机构,d的取值范围为 440 mm≤ d ≤760 mm。8-8 在图所示的铰链四杆机构中,各杆的长度为 lf=28 mm,lf=52 mm,l*=50 mm,la=72 mm,试求:K;两个转动副是周转副还是摆转副;两个转动副是否仍为周转副?解:*ACbfAD-∠CbADf ADrc cos(T)-|||-、 ,=37.951ºHADrc cos(T)-|||-、 ,=19.389º 所以 θ=18.56º K=(T)-|||-、 ,=1.231DC3=∠C5DA-∠CLDAcos(T)-|||-、 ,=79.727º ∠C1DA= arc cos (T)-|||-、 ,=9.169º所以 φ=70.56º(5)13=arccos(T)-|||-、 ,=51.063º ∠B3C1D=arccos =157.266ºCD=22.73º两个转动副仍是摆转副。两个转动副仍为周转副。图在图示位置时凸轮机构的压力角,凸轮从图示位置转过90º后推杆的位移;并标出图b推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角。解:过凸轮几何中心O'和滚子中心A作直线,该直线与推杆导路中心轴线之间所夹的锐角即为压力角α。点。以凸轮回转中心O为圆心、OB为半径作圆弧,与原来位置的推杆导路中心轴线交于B'点。则线段AB'即为凸轮从图示位置转过90º后推杆的位移s。O为圆心、OB为半径作圆弧,与理论廓线分别交于B'和B"点,分别过B'和B"点作偏距圆的切线,切点分别为K'和K"。则凸轮转角为δ=∠KOK'和δ'=∠KOK"(>180º)。O'B'与K'B'所夹锐角为压力角α,直线O'B"与K"B"所夹锐角为压力角α'。10-27 试问当渐开线标准齿轮的齿根圆与基圆重合时,其齿数应为多少?又当齿数大于以上求得的齿数时,试问基圆与齿根圆哪个大?h=mz-2(h+c)m d=d cosα=mz cosα当d= d时,解得=41.5≈42h=(h+c)m分度圆与基圆之间的距离: r-r=r(1-cosα)=mz(1-cosα)/2由此可知,随着齿数的增加,分度圆与齿根圆之间的距离不变,而分度圆与基圆之间的距离在增大;当齿数等于42时,齿根圆与基圆重合;当齿数大于42时,齿根圆大于基圆。P处啮合时,是否还有其他轮齿也处于啮合状态;又当一对轮齿在B点啮合时,情况又如何?解:r=mz/2=5×19/2=47.5 mm r=mz/2=5×42/2=105 mmr=r+m=52.5 mm r=r+m=110 mmrccos(rcosα/r)=31.77º α=arccos(rcosα/r)=26.24º按标准中心距安装时,α'=α。[z(tanα-tanα')+z(tanα-tanα')]/(2π)=1.63P处啮合时,没有其他轮齿也处于啮合状态。点啮合时,还有一对轮齿也处于啮合状态。'=725 mm时,两轮的啮合角α'。又当α'=22º30'时,试求其中心距a'。=m(z+z)/2=20×(30+40)/2=700 mmcosα得rccos(acosα/a')=arccos(700×cos20º/725)=24.87ºcosα/ cosα'=700×cos20º/cos22.5º=711.98 mm11-17 在图示的电动三爪卡盘传动轮系中,设已知各轮齿数为:z=6、z=z=25、z=57、z=56。试求传动比i。H-3、1-2-2'-H-4、4-2'-2-H-3。但是其中任意两个是独立的。为了解题方便,可选择其中两个行星轮系。H-3组成的行星轮系得i=(n-n)/(n-n)=1-i=-z/z即 i=1+z/zH-3组成的行星轮系得i=(n-n)/(n-n)=1-i=+z/z即 i=1-z/z所以 i=i/i=(1+z/z)/( 1-z/z)=(1+57/6)/(1-57/56)=-588⏺11-21 在图示的轮系中,设各轮的模数均相同,且为标准传动,若已知z=z=z=z=20、z=z=z=z=40。试问:当把齿轮1作为原动件时,该机构是否具有确定的运动?齿轮3、5的齿数应如何确定?当n=980 r/min时,n及n各为多少?解:该机构中齿轮6、6'和7是不影响运动传递的重复部分,将带入虚约束。齿轮1、5和机架构成复合铰链。=3n-(2p+p)=3×5-(2×5+4)=1当把齿轮1作为原动件时,该机构具有确定的运动。根据齿轮1与3同心,得 r=r+r+r 即 z=z+z+z=20+40+20=80根据齿轮3'与5同心,得 r=r+2r 即 z=z+2z=20+2×40=100由2-2'-5-1-3组成差动轮系,有i=(n-n)/(n-n)=-(zz)/(zz)由3'-4-5组成定轴轮系,有i=n/n=-z/z因为 n=n 所以联立求解以上两式,得n=-(5/49)n=-100 r/min n=n/49=20 r/min
-16. 试计算图示各机构的自由度。图a、d为齿轮—连杆[1]组合机构;图b为凸轮[2]—连杆组合机构(图中在D处为铰接在一起的两个滑块);图c为一精压机机构。并问在图d所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?
解
A. 分析:A为复合铰链,不存在局部自由度和虚约束。B. =3n-(2pL+pH)=3×4-(2×5+1)=1
C. =3n-(2pL+pH-p')-F'=3×4-(2×5+1-0)-0=1
D. E为局部自由度。
E. =3n-(2pL+pH)=3×5-(2×6+2)=1
F. =3n-(2pL+pH-p')-F'=3×7-(2×8+2-0)-2=1
G. 处虽存在轨迹重合的问题,但由于D处相铰接的双滑块为一个Ⅱ级杆组,未引入约束,故机构不存在虚约束。如果将相铰接的双滑块改为相固联的十字滑块,则该机构就存在一个虚约束。
BCDE就可以了,而其余部分为重复部分,则引入了虚约束。
=3n-(2pL+pH)=3×5-(2×7+0)=1
=3n-(2pL+pH-p')-F'=3×11-(2×17+0-2)-0=1
为复合铰链;
处高副的数目为2。不存在局部自由度和虚约束。
=3n-(2pL+pH)=3×6-(2×7+3)=1
=3n-(2pL+pH-p')-F'=3×6-(2×7+3-0)-0=1
齿轮3与5的中心距受到约束,轮齿两侧齿廓只有一侧接触,另一侧存在间隙,故齿轮高副提供一个约束。
齿条7与齿轮5的中心距没有受到约束,两齿轮的中心可以彼此靠近,使轮齿两侧齿廓均接触,因轮齿两侧接触点处的法线方向并不重合,故齿轮高副提供两个约束。
d/s,φ=165º,试用瞬心法求:
的速度vL;
C线上(或其延长线上)速度最小的一点E的位置及其速度的大小;

 当vC=0时,φ角之值(有两个解)。
当vC=0时,φ角之值(有两个解)。解
P12在A点,P23在B点,P34在C点,P14在D点,P13在直线AB与CD的交点,P24在直线AD与BC的交点)。
P24A=3.21cm=32.1 mm, AP13=59.5 mm。
P24处速度相同,ω2μL P24A=ω4μL(P24A+AD),
P4A/(P2A+AD)
P24A/(P24A+AD)=90×10×32.1/(32.1+40)=400.69 mm/s=0.4m/s
C线上(或其延长线上)速度最小的一点E,应该距PC最近。如图b所示,过P4作直线BC的垂线,垂足就是点E。PCDE=47.5 mm
[μ2(AB+APCD)]= ω24l24/[μ13(AB+AP13)]
P13E=ω3lB PLE /(AB+AP13)=10×60×47.5/(20+59.5)=358.49 mm/s=0.358 m/s
P2A/(PABA+AD)可知,欲使vL=0,必须有P13A=0,即直线BC通过点A。此时,杆AB与BC重叠或拉直共线。当杆AB与BC重叠共线时(图c),φ=226º;当杆AB与BC拉直共线时(图d),φ=27º。
、b)、c)三个位置,F为作用在活塞上的力,转动副A及
上所画的虚线小圆为摩擦圆,试决定在此三个位置时作用在连杆AB上的作用力的真实方向(构件重量及惯性力略去不计)。
B上的作用力的真实方向如题4-13答图所示。
分析
OA上M与ω方向相反,所以曲柄OA为从动件,滑块为原动件,F为驱动力,M为工作阻力。连杆AB为二力构件。
中,连杆AB受压,FE和F3共线,方向向内。∠OAB减小,ωL为顺时针方向,所以F13切于A处摩擦圆下方。∠ABO增大,ω2为顺时针方向,所以FAB切于
处摩擦圆上方。故F13和F13作用线应同时切于A处摩擦圆的下方和B处摩擦圆的上方(如图d所示)。
B受压,FC和F4共线,方向向内。∠OAB减小,ωCD为顺时针方向,所以F2切于A处摩擦圆下方。∠ABO减小,ωCD为逆时针方向,所以F24切于
处摩擦圆下方。故F24和FC作用线应同时切于A处摩擦圆的下方和B处摩擦圆的下方(如图e所示)。
B受拉,F24和FR12共线,方向向外。∠OAB增大,ωR32为顺时针方向,所以F21切于A处摩擦圆上方。∠ABO减小,ωR12为顺时针方向,所以F23切于
处摩擦圆下方。故FR32和FR12作用线应同时切于A处摩擦圆的上方和B处摩擦圆的下方(如图f所示)。
6-2 动平衡的构件一定是静平衡的,反之亦然,对吗?为什么?在图示的两根曲轴中,设各曲拐的偏心质径积均相等,且各曲拐均在同一轴平面上。试说明两者各处于何种平衡状态?
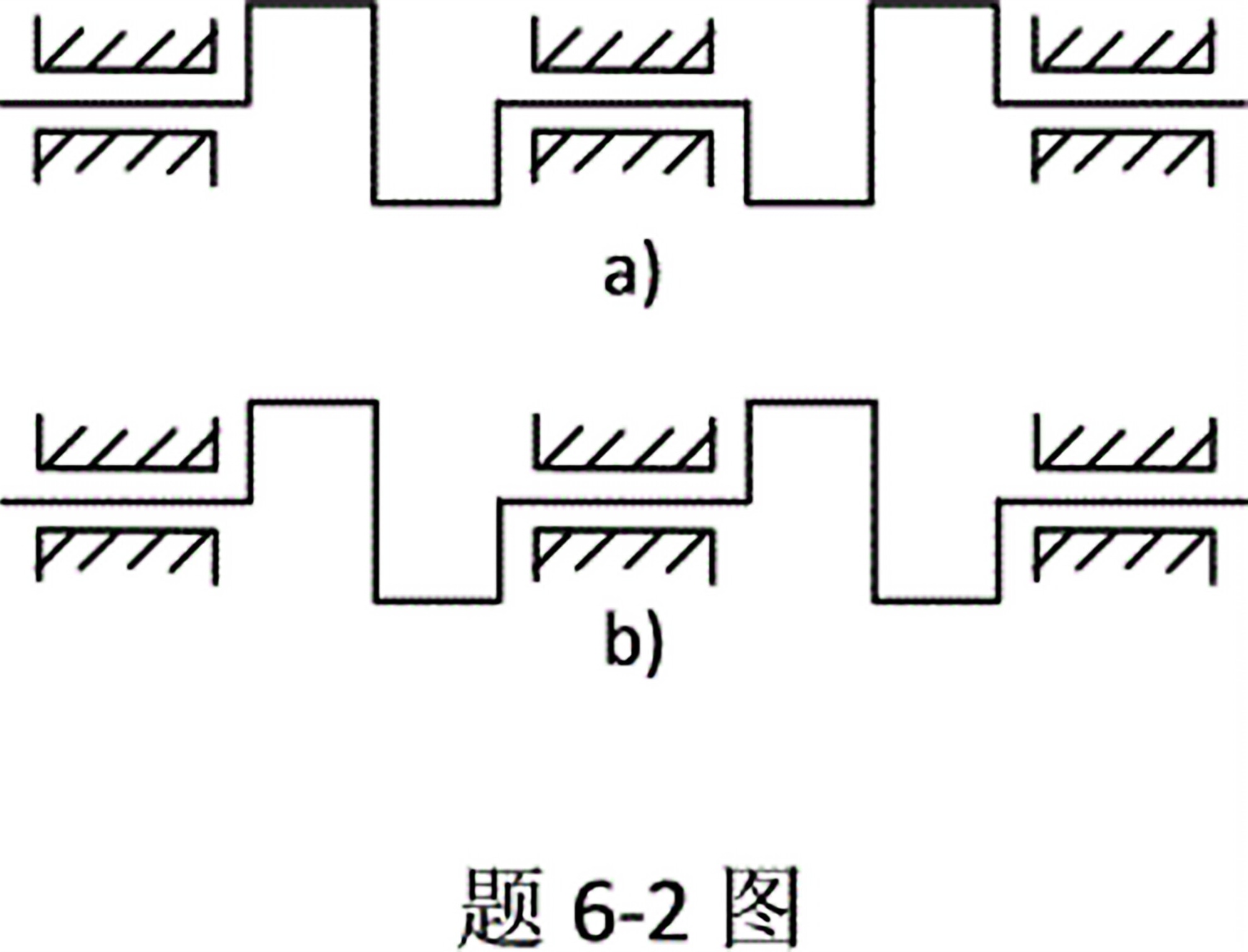 解 “静平衡的构件一定是动平衡的”这一说法不正确。因为达到静平衡的构件仅满足了静平衡条件,即各偏心质量(包括平衡质量)产生的惯性力的矢量和为零
解 “静平衡的构件一定是动平衡的”这一说法不正确。因为达到静平衡的构件仅满足了静平衡条件,即各偏心质量(包括平衡质量)产生的惯性力的矢量和为零 ,而这些惯性力所构成的力矩矢量和不一定为零。
,而这些惯性力所构成的力矩矢量和不一定为零。中,满足
和 ,所以处于动平衡状态。
,所以处于动平衡状态。图b)中,仅满足
,但 ,所以处于静平衡状态。
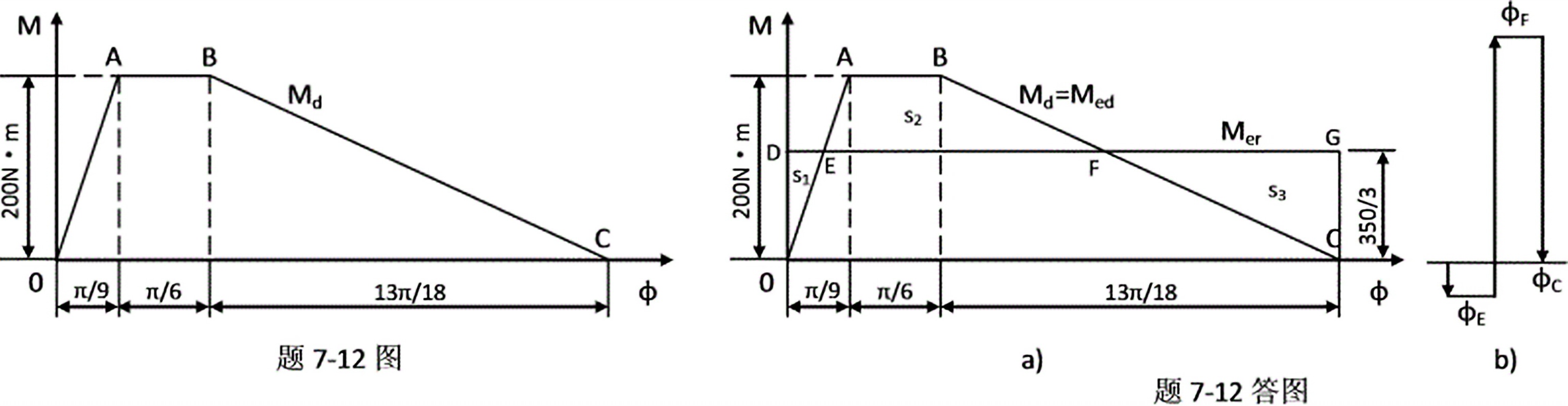
,所以处于静平衡状态。Md随曲柄转角φ的变化曲线如图所示,其运动周期φT=π,曲柄的平均转速nm=620r/min。当用该内燃机驱动一阻抗力为常数的机械时,如果要求其运转不均匀系数δ=0.01。试求
 曲柄最大转速nF和相应的曲柄转角位置φed;
曲柄最大转速nF和相应的曲柄转角位置φed;Jd(不计其余构件的转动惯量)。
Mer=Md 等效阻力矩Mr=常数
Wer应等于阻抗功Wr ,即
Md·π= Wer=Wer=(π/9)·200/2+(π/6)·200+(13π/18)·200/2=350π/3
Med=350/3 N·m
Med曲线,如答图a)所示。
E=7π/108,由
 得FG=91π/216,EF=π-DE-FG=111π/216
得FG=91π/216,EF=π-DE-FG=111π/216M2曲线与等效阻力矩M3曲线之间所围的面积
E0面积=-
 =-
=- =-3.781π
=-3.781πBFE面积=+
=28.356πGC面积=-
=-24.576π作能量指示图,如图b)所示,可知:
在φ=φ1=7π/108=11.667º处,曲柄有最小转速n2
在φ=φ3=125π/216=104.167º处,曲柄有最大转速n4
由ωmin=ω1(1+δ/2) ω2=ω1(1-δ/2) 知
n2=n1(1+δ/2)=620×(1+0.01/2)=623.1 r/min
W2=s1=6125π/216=89.085
J2=
 =2.11 kg·m3
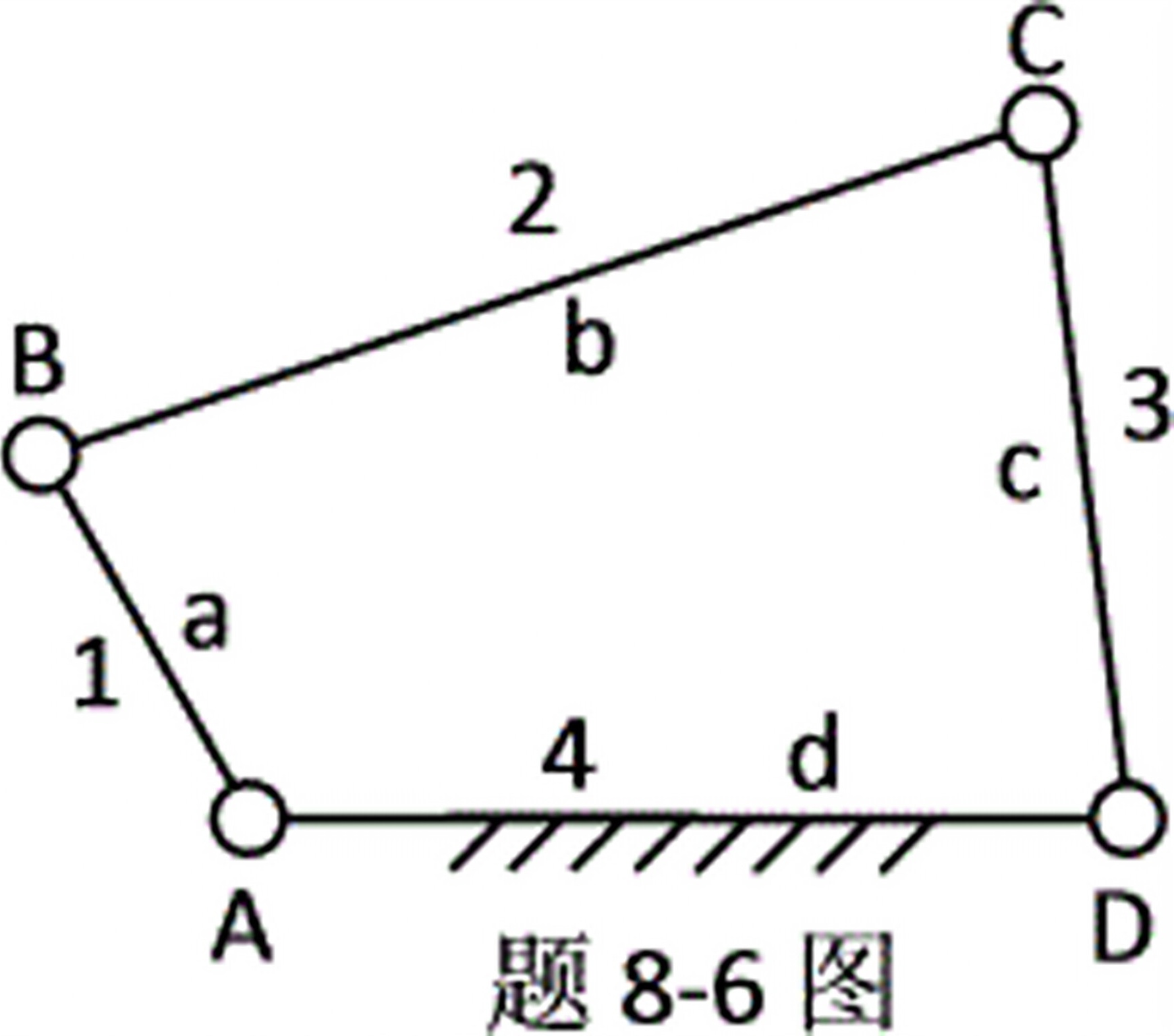
=2.11 kg·m3b、c三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d的取值范围应为何值?
解:
+b<c+d 满足杆长条件,且最短杆1为连架杆,所以该机构有曲柄。杆1为曲柄。
 因为机构满足杆长条件,所以通过选不同杆为机架的办法获得双曲柄机构。当以最短杆为机架时,获得双曲柄机构。 欲获得曲柄摇杆机构,应满足以下两个条件:
因为机构满足杆长条件,所以通过选不同杆为机架的办法获得双曲柄机构。当以最短杆为机架时,获得双曲柄机构。 欲获得曲柄摇杆机构,应满足以下两个条件: 杆长条件;
杆长条件; 杆1为最短杆。关于d的取值范围讨论如下。
杆1为最短杆。关于d的取值范围讨论如下。+d≤b+c ,故 d≤b+c-a=760 mm
+b≤c+d ,故 d≥a+b-c=440 mm
所以欲获得曲柄摇杆机构,d的取值范围为 440 mm≤ d ≤760 mm。
8-8 在图所示的铰链四杆机构中,各杆的长度为 lf=28 mm,lf=52 mm,l*=50 mm,la=72 mm,试求:
K;
两个转动副是周转副还是摆转副;
两个转动副是否仍为周转副?
解:
*ACb
fAD-∠CbAD
f AD
rc cos
 =37.951º
=37.951ºHAD
rc cos
 =19.389º 所以 θ=18.56º K==1.23
=19.389º 所以 θ=18.56º K==1.231DC3=∠C5DA-∠CLDA
cos
=79.727º ∠C1DA= arc cos =9.169º所以 φ=70.56º
(5)
13
=arccos
 =51.063º ∠B3C1D=arccos =157.266º
=51.063º ∠B3C1D=arccos =157.266ºCD=22.73º
两个转动副仍是摆转副。
两个转动副仍为周转副。
图在图示位置时凸轮机构的压力角,凸轮从图示位置转过90º后推杆的位移;并标出图b推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角。
解:
过凸轮几何中心O'和滚子中心A作直线,该直线与推杆导路中心轴线之间所夹的锐角即为压力角α。
点。以凸轮回转中心O为圆心、OB为半径作圆弧,与原来位置的推杆导路中心轴线交于B'点。则线段AB'即为凸轮从图示位置转过90º后推杆的位移s。
O为圆心、OB为半径作圆弧,与理论廓线分别交于B'和B"点,分别过B'和B"点作偏距圆的切线,切点分别为K'和K"。则凸轮转角为δ=∠KOK'和δ'=∠KOK"(>180º)。
O'B'与K'B'所夹锐角为压力角α,直线O'B"与K"B"所夹锐角为压力角α'。
10-27 试问当渐开线标准齿轮的齿根圆与基圆重合时,其齿数应为多少?又当齿数大于以上求得的齿数时,试问基圆与齿根圆哪个大?
h=mz-2(h+c)m d=d cosα=mz cosα
当d= d时,解得
=41.5≈42
h=(h+c)m
分度圆与基圆之间的距离: r-r=r(1-cosα)=mz(1-cosα)/2
由此可知,随着齿数的增加,分度圆与齿根圆之间的距离不变,而分度圆与基圆之间的距离在增大;当齿数等于42时,齿根圆与基圆重合;当齿数大于42时,齿根圆大于基圆。
P处啮合时,是否还有其他轮齿也处于啮合状态;又当一对轮齿在B点啮合时,情况又如何?
解:r=mz/2=5×19/2=47.5 mm r=mz/2=5×42/2=105 mm
r=r+m=52.5 mm r=r+m=110 mm
rccos(rcosα/r)=31.77º α=arccos(rcosα/r)=26.24º
按标准中心距安装时,α'=α。
[z(tanα-tanα')+z(tanα-tanα')]/(2π)=1.63
P处啮合时,没有其他轮齿也处于啮合状态。
点啮合时,还有一对轮齿也处于啮合状态。
'=725 mm时,两轮的啮合角α'。又当α'=22º30'时,试求其中心距a'。
=m(z+z)/2=20×(30+40)/2=700 mm
cosα得
rccos(acosα/a')=arccos(700×cos20º/725)=24.87º
cosα/ cosα'=700×cos20º/cos22.5º=711.98 mm
11-17 在图示的电动三爪卡盘传动轮系中,设已知各轮齿数为:z=6、z=z=25、z=57、z=56。试求传动比i。
H-3、1-2-2'-H-4、4-2'-2-H-3。但是其中任意两个是独立的。为了解题方便,可选择其中两个行星轮系。
H-3组成的行星轮系得
i=(n-n)/(n-n)=1-i=-z/z
即 i=1+z/z
H-3组成的行星轮系得
i=(n-n)/(n-n)=1-i=+z/z
即 i=1-z/z
所以 i=i/i=(1+z/z)/( 1-z/z)=(1+57/6)/(1-57/56)=-588
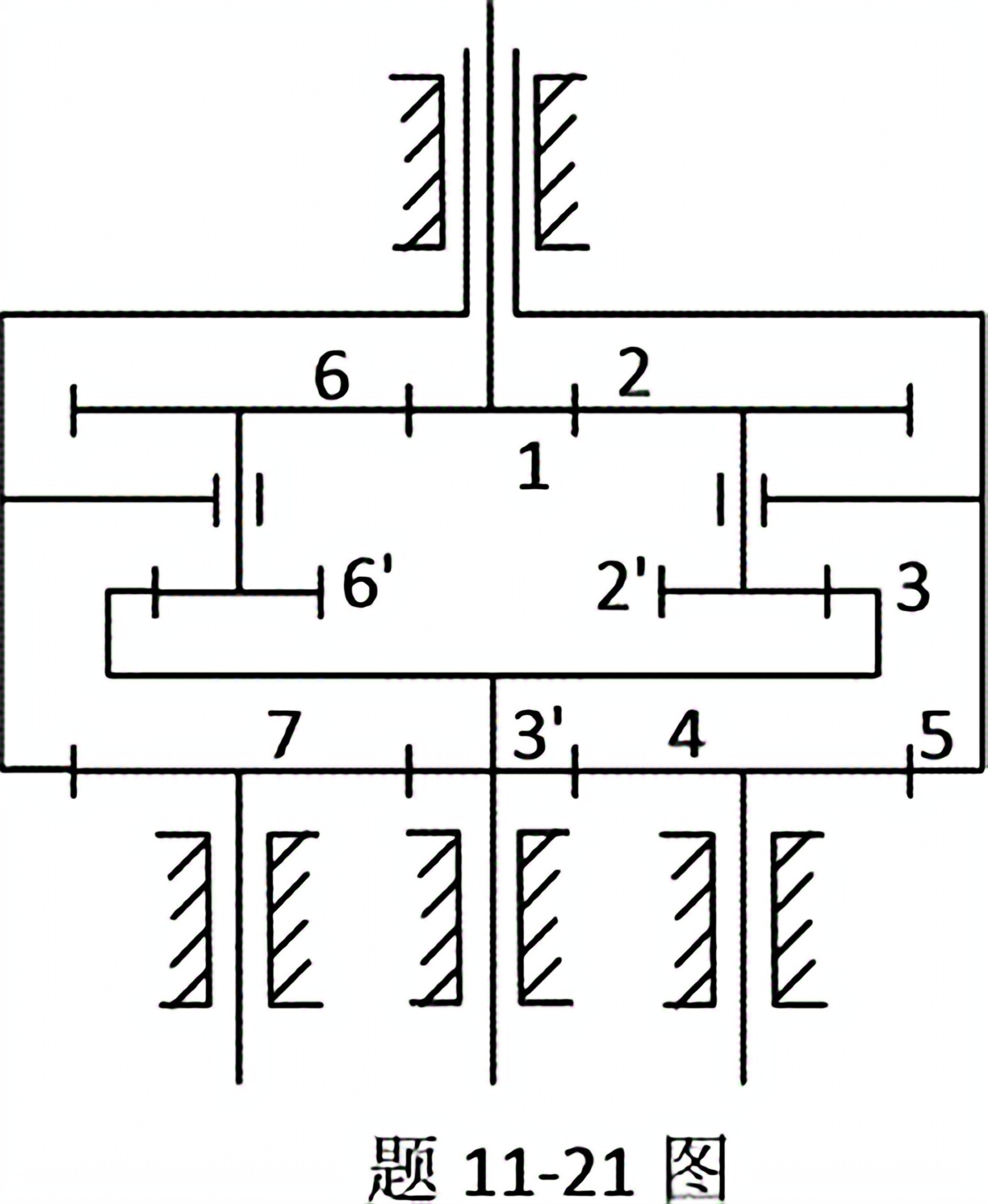
⏺11-21 在图示的轮系中,设各轮的模数均相同,且为标准传动,若已知z=z=z=z=20、z=z=z=z=40。试问:
当把齿轮1作为原动件时,该机构是否具有确定的运动?
齿轮3、5的齿数应如何确定?
当n=980 r/min时,n及n各为多少?
解:
该机构中齿轮6、6'和7是不影响运动传递的重复部分,将带入虚约束。齿轮1、5和机架构成复合铰链。
=3n-(2p+p)=3×5-(2×5+4)=1
当把齿轮1作为原动件时,该机构具有确定的运动。
根据齿轮1与3同心,得 r=r+r+r 即 z=z+z+z=20+40+20=80
根据齿轮3'与5同心,得 r=r+2r 即 z=z+2z=20+2×40=100
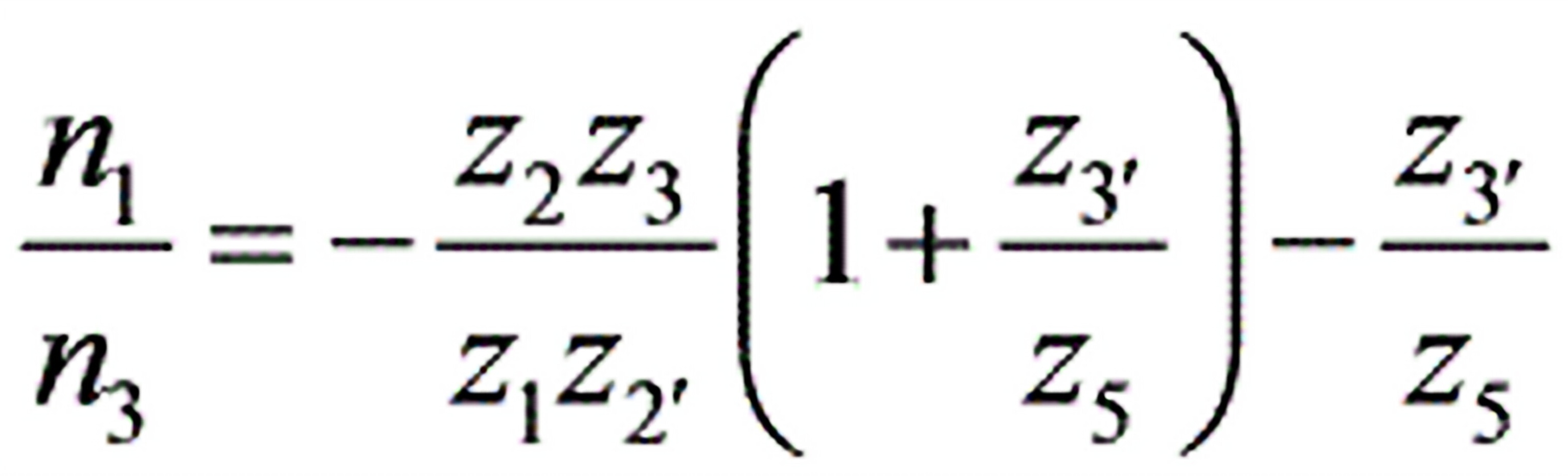
由2-2'-5-1-3组成差动轮系,有
i=(n-n)/(n-n)=-(zz)/(zz)
由3'-4-5组成定轴轮系,有
i=n/n=-z/z
因为 n=n 所以联立求解以上两式,得
n=-(5/49)n=-100 r/min n=n/49=20 r/min
题目解答
答案
分析: A 为复合铰链,不存在局部自由度和虚约束。 分析: B 、 E 为局部自由度。 注意:该机构在 D 处虽存在轨迹重合的问题,但由于 D 处相铰接的双滑块为一个 Ⅱ 级杆组,未引入约束,故机构不存在虚约束。如果将相铰接的双滑块改为相固联的十字滑块,则该机构就存在一个虚约束。 分析:该机构存在重复结构部分,故存在虚约束。实际上,从传递运动的独立性来看,有机构 ABCDE 就可以了,而其余部分为重复部分,则引入了虚约束。 分析: A 、 B 、 C 为复合铰链; D 处高副的数目为 2 。不存在局部自由度和虚约束。 ( P 12 在 A 点, P 23 在 B 点, P 34 在 C 点, P 14 在 D 点, P 13 在直线 AB 与 CD 的交点, P 24 在直线 AD 与 BC 的交点) 分析 因为曲柄[3] OA 上 M 与 ω 方向相反,所以曲柄 OA 为从动件,滑块为原动件, F 为驱动力, M 为工作阻力。连杆 AB 为二力构件。 在图 a) 中,连杆 AB 受压, F R12 和 F R32 共线,方向向内。∠ OAB 减小, ω 21 为顺时针方向,所以 F R12 切于 A 处摩擦圆下方。∠ ABO 增大, ω 23 为顺时针方向,所以 F R32 切于 B 处摩擦圆上方。故 F R12 和 F R32 作用线应同时切于 A 处摩擦圆的下方和 B 处摩擦圆的上方(如图 d 所示)。 在图 b) 中,连杆 AB 受压, F R12 和 F R32 共线,方向向内。∠ OAB 减小, ω 21 为顺时针方向,所以 F R12 切于 A 处摩擦圆下方。∠ ABO 减小, ω 23 为逆时针方向,所以 F R32 切于 B 处摩擦圆下方。故 F R12 和 F R32 作用线应同时切于 A 处摩擦圆的下方和 B 处摩擦圆的下方(如图 e 所示)。 在图 c) 中,连杆 AB 受拉, F R12 和 F R32 共线,方向向外。∠ OAB 增大, ω 21 为顺时针方向,所以 F R12 切于 A 处摩擦圆上方。∠ ABO 减小, ω 23 为顺时针方向,所以 F R32 切于 B 处摩擦圆下方。故 F R12 和 F R32 作用线应同时切于 A 处摩擦圆的上方和 B 处摩擦圆的下方(如图 f 所示)。