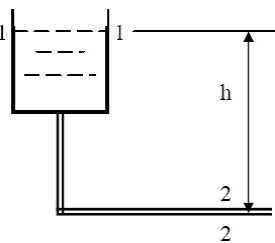
--- 1-|||----|||-----|||-h 欲建一水塔向某工厂供水,如图所示,从水塔到工厂的管长(包括局部阻力当量长度)为500m,最大流量为0.02m3·s-1。管出口处需保持10m 水柱的压头(表压)。若摩擦系数λ=0.023,求:(a)当管内流速为1.05 m·s-1,所需管径及塔高;(b)当管内流速为4 m·s-1,所需管径及塔高;(c)由(a)、(b)计算结果,分析满足一定流量时,塔高与管径的关系。
 欲建一水塔向某工厂供水,如图所示,从水塔到工厂的管长(包括局部阻力当量长度)为500m,最大流量为0.02m3·s-1。管出口处需保持10m 水柱的压头(表压)。若摩擦系数λ=0.023,求:(a)当管内流速为1.05 m·s-1,所需管径及塔高;(b)当管内流速为4 m·s-1,所需管径及塔高;(c)由(a)、(b)计算结果,分析满足一定流量时,塔高与管径的关系。
欲建一水塔向某工厂供水,如图所示,从水塔到工厂的管长(包括局部阻力当量长度)为500m,最大流量为0.02m3·s-1。管出口处需保持10m 水柱的压头(表压)。若摩擦系数λ=0.023,求:(a)当管内流速为1.05 m·s-1,所需管径及塔高;(b)当管内流速为4 m·s-1,所需管径及塔高;(c)由(a)、(b)计算结果,分析满足一定流量时,塔高与管径的关系。
题目解答
答案
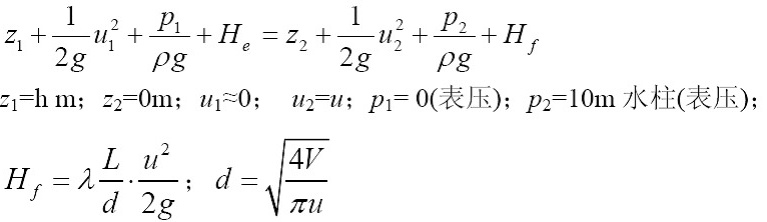
解:如图选取1,2 截面,计算基准面为管出口水平面。压力以表压表示。
在1→2 列柏努利方程,得:



解析
本题考查伯努利方程在管道流动中的应用,需结合摩擦损失计算和流量与管径的关系。解题核心在于:
- 建立能量方程:以水塔和工厂出口为控制截面,考虑动能、势能、压力能及摩擦损失;
- 流量与流速、管径的关系:通过公式 $Q = \dfrac{\pi d^2 u}{4}$ 联立求解;
- 分析塔高与管径的关系:通过计算结果归纳摩擦损失对塔高的影响规律。
第(a)题
计算管径
根据流量公式 $Q = \dfrac{\pi d^2 u}{4}$,变形得:
$d = \sqrt{\dfrac{4Q}{\pi u}} = \sqrt{\dfrac{4 \times 0.02}{3.14 \times 1.05}} \approx 0.156 \, \text{m}$
计算摩擦损失
摩擦损失公式为:
$H_f = \lambda \dfrac{L}{d} \cdot \dfrac{u^2}{2g} = 0.023 \times \dfrac{500}{0.156} \times \dfrac{1.05^2}{2 \times 9.81} \approx 4.14 \, \text{m水柱}$
计算塔高
代入伯努利方程:
$h = \dfrac{u_2^2}{2g} + p_2 + H_f = \dfrac{1.05^2}{2 \times 9.81} + 10 + 4.14 \approx 14.2 \, \text{m}$
第(b)题
计算管径
同理:
$d = \sqrt{\dfrac{4 \times 0.02}{3.14 \times 4}} \approx 0.08 \, \text{m}$
计算摩擦损失
$H_f = 0.023 \times \dfrac{500}{0.08} \times \dfrac{4^2}{2 \times 9.81} \approx 117.16 \, \text{m水柱}$
计算塔高
$h = \dfrac{4^2}{2 \times 9.81} + 10 + 117.16 \approx 128 \, \text{m}$
第(c)题
分析:
当流量固定时,管径减小会导致流速增大,从而摩擦损失急剧增加(与 $d^{-5}$ 成正比)。因此,塔高需显著增加以补偿更大的能量损失,说明塔高与管径呈五次方反比关系。