题目
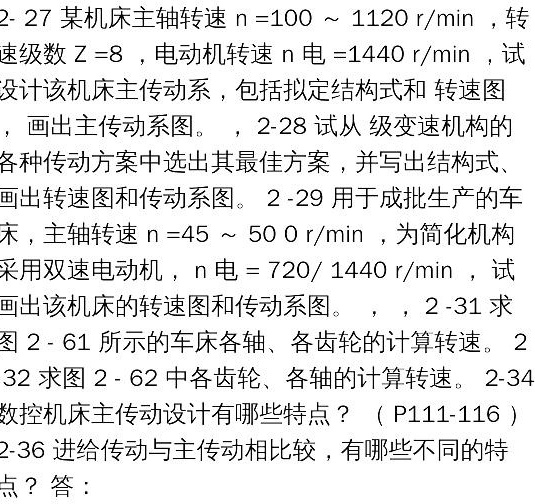
第二章:2-4 机床系列型谱含意是什么?答:先选择用量大的机床为“基型系列”,然后在此基础上派生出若干“变型系列”,基型和变型即为机床的系列型谱。例如,中型卧式车床的简略系列型谱如表2-1所示(P76)。2-8 工件表面的形成方法是什么?(P63)答:工件表面的形成方法有四种:轨迹法,如图2-2(a),(b);成形法,如图2-2(c),(d);相切法,如图2-2(e);展成法,如图2-2(f)。2-11 机床的复合运动、内联系传动链、运动轴的联动的含义及关系如何?(P69-71)答:机床的复合运动:运动之间有严格的运动关系(P65)。如车床主轴旋转和车螺纹的纵向移动。内联系传动链:机床执行件与执行件之间的传动链成为内联系传动链,内链将两个或以上的运动组成复合成形运动。车床车螺纹的传动链即为内联系传动链。运动轴的联动:数控机床各运动轴之间通过伺服电机联动可实现内链的复合成形运动,联动即为协调的运动。2-14 机床运动功能式和运动功能图表达的含义是什么?答:运动功能式(P67):表示机床运动的个数、形式(直线或回转[1]运动)、功能(主运动、进给运动、非成形运动)及排列顺序,是描述机床运动功能最简洁的表达形式。运动功能图(P68):与机床运动功能式对应的图成为运动功能图,如图2-4,又称机床运动原理图。2-18 机床运动分配式的含义是什么?(P70)答:运动分配式:带有接地符号“·”符号的运动功能式。一个运动功能式可能有几种运动分配式。如铣床运动功能式W /Xf, Zf, Yf, Cp /T,可能有下列4种运动分配式:①W /·Xf, Zf, Yf, Cp/ T②W /Xf·Zf, Yf, Cp/ T③W /Xf, Zf·Yf, Cp/ T④W /Xf, Zf, Yf·Cp/ T2-20 机床的主参数及尺寸运动参数根据什么确定?(P80-81)答:对于通用机床,机床的主参数及尺寸参数主要根据国家标准GB/T 15375-1994确定。对于专用机床,应根据加工工件要求,参照通用机床的有关标准来确定。机床的运动参数的确定主要依据所设计机床加工工件的尺寸、主传动类型和采用刀具的材质和类型等确定的。比如车床的设计,一定材质的车刀所承受的切削速度是一定的,工件直径增大,主轴转速应减小;反之,工件直径减小,主轴转速应增大。2-24 什么是传动组的级比和级比指数?常规变速传动系的各传动组的级比指数有什么规律性?答:级比:主动轴上同一点传往从动轴相邻两传动线的比值;用表示;其中指数称为级比指数,它相当于由相邻两传动线与从动轴交点之间相距的格数。常规变速传动系的各传动组的级比指数有什么规律是:基本组的级比指数X=1;,第一扩大组的级比指数X1=P(P基本组的传动副数);第二扩大组的级比指数X2=PP1(P1为第一扩大组的传动副数)。如12级传动的传动结构式为,排列为基本组、一扩、二扩;下角标为级比指数。2-26某车床的主轴转速为n=40~1800 r/min,公比φ=1.41,电动机的转速n电=1440 r/min,试拟定结构式、转速图;确定齿轮齿数、带轮直径、验算转速误差;画出主传动系图。解:(1)确定转速级数:根据教材式(3-2),其中,所以转速级数 (2) 确定传动结构式选择传动方案:,考虑到主传动设计前密后疏的原则,传动结构式应为,(3)绘制转速图根据表3-6标准数列,经圆整可以得到12级转速为:40, 56, 80, 112, 160, 224, 315, 450, 630, 900, 1250, 1800确定定比传动比:取轴Ⅰ的转速值为900r/min,则电机轴与轴Ⅰ的传动比为:确定各变速组最小传动比从转速点900 r/min到40r/min共有10格,按照前缓后急的原则,第二变速组最小传动线下降2格;第一变速组最小传动线下降1格;第二变速组下降3格,第三变速组最小传动线下降4格,最大上升2格。则,转速图如下:A. 初步设计的转速图 B. 最后确定的转速图 C. (4)传动系图设计(包括计算齿轮齿数、带轮直径) D. 参考教材p85,图3-13,可以得到本设计传动系图为 E. (5)验算实际转速误差 F. ,与标注转速相比,没有误差; G. ,实际误差;,实际误差。… …转速误差小于5%,符合设计要求。Z=8,电动机转速n电=1440 r/min,试设计该机床主传动系,包括拟定结构式和转速图,画出主传动系图。解:(1)计算公比根据教材式(3-2),可以得到,由于, 所以 (2)确定传动结构式Z=4×2; ② Z=2×4;③ Z=2×2×2Z=2×2×2根据前疏后密原则,选择结构式为: 8=21×22×24(3) 转速图的设计根据表3-6标准数列,经圆整可以得到8级转速为:100, 140, 200, 280, 400, 560, 800, 1120 r/min确定定比传动比:取轴Ⅰ的转速值为800r/min,则电机轴与轴Ⅰ的传动比为:确定各变速组最小传动比从转速点800 r/min到100r/min共有6格,三个变速组的最小传动线平均下降两格,按照前缓后急的原则,第二变速组最小传动线下降2格;第一变速组最小传动线下降2-1=1格;第三变速组最小传动线下降2+1=3格。(4)绘制转速图(5)传动系简图设计2-28 试从级变速机构的各种传动方案中选出其最佳方案,并写出结构式、画出转速图和传动系图。解:主传动最佳传动方案的传动结构式为 ,基本组传动副为3,第一扩大组传动副为3,级比指数为3;第二扩大组传动副为2,级比指数为9。根据标准数列表,取转速为:31.5, 40, 50, 63, 80, 100, 125, 160, 200, 250, 315, 400, 500, 630, 800, 1000, 1250, 1600。 设电机转速为1440r/min。确定定比传动比:取轴Ⅰ的转速值为800r/min,则电机轴与轴Ⅰ的传动比为:定比传动皮带轮的直径分别为130和234mm。确定各变速组最小传动比:从转速点800 r/min到31.5r/min共有14格,按照前缓后急的原则,基本组最小传动线下降2格,基本组相邻两变速组下降1格;第一变速组下降6格,其中相邻两变速组下降3格;第二变速组最小传动线下降6格,最大上升3格。初步确定的转速图如图1所示。初步设计确定的转速图 图(b) 确定齿轮齿数后的转速图假定同一变速组内每对齿轮的齿数和相等,根据教材表2-8(p100- -101),可以确定齿轮的齿数,齿轮齿数确定结果如图2所示。(4) 确定主轴的计算转速根据教材表2-9(p103),中型通用机床主轴计算转速为:r/min图(c)设计的主传动系统图2-29 用于成批生产的车床,主轴转速n=45~500 r/min,为简化机构采用双速电动机,n电=720/1440 r/min,试画出该机床的转速图和传动系图。解:(1)计算公比确定转速级数Z=8,则 , 所以 (2)确定传动结构式Z=2×2×2,根据前疏后密原则,考虑到电动机的情况,选择结构式为:8=22×21×24其中第一级是由双速电机确定的,实际变速箱的结构式为:4=21×24。(3) 转速图的设计根据表3-6标准数列,经圆整可以得到8级转速为:45, 63, 90, 125, 180, 250, 355, 500 r/min确定定比传动比:取轴Ⅰ的转速值为710, 355r/min,则电机轴与轴Ⅰ的传动比为:确定各变速组最小传动比从转速点355 r/min到45r/min共有6格,按照前缓后急的原则,第一变速组最小传动线下降2格;第二变速组最小传动线下降4格。(4)绘制转速图初步设计的转速图最后确定的转速图(5)传动系简图设计2-31 求图2-61所示的车床各轴、各齿轮的计算转速。解:如下图所示,根据教材p103表2-9所示,各轴的计算转速用红色的圈标注在图中,各对齿轮中小齿轮的计算转速用红色箭头标注在图中。2-32求图2-62中各齿轮、各轴的计算转速。解:如下图所示,根据教材p103表2-9所示,各轴的计算转速用红色的圈标注在图中,各对齿轮中小齿轮的计算转速用红色箭头标注在图中。P111-116)答:主传动采用直流或交流电动机无极调速;驱动电动机和主轴功率的匹配性设计;数控机床的高速主传动设计;采用部件标准、模块化结构设计;柔性化、复合化设计;并联机床设计。(本题需要适当展开、解释!)2-36 进给传动与主传动相比较,有哪些不同的特点?答:机床主传动设计特点:主传动采用恒功率传动;除主轴之外,各轴计算转速为最低转速;转速图为前密后疏结构;采用背轮机构、双公比传动、双速电机等方式。机床进给传动设计特点:进给传动是恒转矩传动;各传动件的计算转速是其最高转速;转速图为前疏后密结构;变速范围可比主传动大;采用传动间隙消除机构;采用快速空程传动和微量进给机构。
第二章:
2-4 机床系列型谱含意是什么?
答:先选择用量大的机床为“基型系列”,然后在此基础上派生出若干“变型系列”,基型和变型即为机床的系列型谱。例如,中型卧式车床的简略系列型谱如表2-1所示(P76)。
2-8 工件表面的形成方法是什么?(P63)
答:工件表面的形成方法有四种:轨迹法,如图2-2(a),(b);成形法,如图2-2(c),(d);相切法,如图2-2(e);展成法,如图2-2(f)。
2-11 机床的复合运动、内联系传动链、运动轴的联动的含义及关系如何?(P69-71)
答:机床的复合运动:运动之间有严格的运动关系(P65)。如车床主轴旋转和车螺纹的纵向移动。
内联系传动链:机床执行件与执行件之间的传动链成为内联系传动链,内链将两个或以上的运动组成复合成形运动。车床车螺纹的传动链即为内联系传动链。
运动轴的联动:数控机床各运动轴之间通过伺服电机联动可实现内链的复合成形运动,联动即为协调的运动。
2-14 机床运动功能式和运动功能图表达的含义是什么?
答:运动功能式(P67):表示机床运动的个数、形式(直线或回转[1]运动)、功能(主运动、进给运动、非成形运动)及排列顺序,是描述机床运动功能最简洁的表达形式。
运动功能图(P68):与机床运动功能式对应的图成为运动功能图,如图2-4,又称机床运动原理图。
2-18 机床运动分配式的含义是什么?(P70)
答:运动分配式:带有接地符号“·”符号的运动功能式。一个运动功能式可能有几种运动分配式。
如铣床运动功能式W /Xf, Zf, Yf, Cp /T,可能有下列4种运动分配式:
①W /·Xf, Zf, Yf, Cp/ T
②W /Xf·Zf, Yf, Cp/ T
③W /Xf, Zf·Yf, Cp/ T
④W /Xf, Zf, Yf·Cp/ T
2-20 机床的主参数及尺寸运动参数根据什么确定?(P80-81)
答:对于通用机床,机床的主参数及尺寸参数主要根据国家标准GB/T 15375-1994确定。对于专用机床,应根据加工工件要求,参照通用机床的有关标准来确定。
机床的运动参数的确定主要依据所设计机床加工工件的尺寸、主传动类型和采用刀具的材质和类型等确定的。比如车床的设计,一定材质的车刀所承受的切削速度是一定的,工件直径增大,主轴转速应减小;反之,工件直径减小,主轴转速应增大。
2-24 什么是传动组的级比和级比指数?常规变速传动系的各传动组的级比指数有什么规律性?
答:级比:主动轴上同一点传往从动轴相邻两传动线的比值;用 表示;其中指数
表示;其中指数 称为级比指数,它相当于由相邻两传动线与从动轴交点之间相距的格数。
称为级比指数,它相当于由相邻两传动线与从动轴交点之间相距的格数。
表示;其中指数称为级比指数,它相当于由相邻两传动线与从动轴交点之间相距的格数。常规变速传动系的各传动组的级比指数有什么规律是:基本组的级比指数X=1;,第一扩大组的级比指数X1=P(P基本组的传动副数);第二扩大组的级比指数X2=PP1(P1为第一扩大组的传动副数)。
如12级传动的传动结构式为 ,排列为基本组、一扩、二扩;下角标为级比指数。
,排列为基本组、一扩、二扩;下角标为级比指数。
,排列为基本组、一扩、二扩;下角标为级比指数。2-26某车床的主轴转速为n=40~1800 r/min,公比φ=1.41,电动机的转速n电=1440 r/min,试拟定结构式、转速图;确定齿轮齿数、带轮直径、验算转速误差;画出主传动系图。
解:(1)确定转速级数:
根据教材式(3-2),
其中 ,所以转速级数
,所以转速级数 
,所以转速级数 (2) 确定传动结构式
选择传动方案: ,考虑到主传动设计前密后疏的原则,
,考虑到主传动设计前密后疏的原则,
,考虑到主传动设计前密后疏的原则,传动结构式应为,
,(3)绘制转速图
根据表3-6标准数列,经圆整可以得到12级转速为:
40, 56, 80, 112, 160, 224, 315, 450, 630, 900, 1250, 1800
确定定比传动比:取轴Ⅰ的转速值为900r/min,则电机轴与轴Ⅰ的传动比为:
确定各变速组最小传动比
从转速点900 r/min到40r/min共有10格,按照前缓后急的原则,第二变速组最小传动线下降2格;第一变速组最小传动线下降1格;第二变速组下降3格,第三变速组最小传动线下降4格,最大上升2格。
则,转速图如下:
A. 初步设计的转速图B. 最后确定的转速图
C. (4)传动系图设计(包括计算齿轮齿数、带轮直径)
D. 参考教材p85,图3-13,可以得到本设计传动系图为
E. (5)验算实际转速误差
F.
 ,与标注转速相比,没有误差;
,与标注转速相比,没有误差;G.
 ,实际误差
,实际误差 ;
; ,实际误差
,实际误差 。
。… …
转速误差小于5%,符合设计要求。
Z=8,电动机转速n电=1440 r/min,试设计该机床主传动系,包括拟定结构式和转速图,画出主传动系图。
解:(1)计算公比
根据教材式(3-2),可以得到
 ,由于
,由于
 , 所以
, 所以 
(2)确定传动结构式
Z=4×2; ② Z=2×4;③ Z=2×2×2
Z=2×2×2
根据前疏后密原则,选择结构式为: 8=21×22×24
(3) 转速图的设计
根据表3-6标准数列,经圆整可以得到8级转速为:100, 140, 200, 280, 400, 560, 800, 1120 r/min
确定定比传动比:取轴Ⅰ的转速值为800r/min,则电机轴与轴Ⅰ的传动比为:
确定各变速组最小传动比
从转速点800 r/min到100r/min共有6格,三个变速组的最小传动线平均下降两格,按照前缓后急的原则,第二变速组最小传动线下降2格;第一变速组最小传动线下降2-1=1格;第三变速组最小传动线下降2+1=3格。
(4)绘制转速图
(5)传动系简图设计
2-28 试从
 级变速机构的各种传动方案中选出其最佳方案,并写出结构式、画出转速图和传动系图。
级变速机构的各种传动方案中选出其最佳方案,并写出结构式、画出转速图和传动系图。解:主传动最佳传动方案的传动结构式为
 ,基本组传动副为3,第一扩大组传动副为3,级比指数为3;第二扩大组传动副为2,级比指数为9。
,基本组传动副为3,第一扩大组传动副为3,级比指数为3;第二扩大组传动副为2,级比指数为9。根据标准数列表,取转速为:31.5, 40, 50, 63, 80, 100, 125, 160, 200, 250, 315, 400, 500, 630, 800, 1000, 1250, 1600。 设电机转速为1440r/min。
确定定比传动比:取轴Ⅰ的转速值为800r/min,则电机轴与轴Ⅰ的传动比为:
定比传动皮带轮的直径分别为130和234mm。
确定各变速组最小传动比:从转速点800 r/min到31.5r/min共有14格,按照前缓后急的原则,基本组最小传动线下降2格,基本组相邻两变速组下降1格;第一变速组下降6格,其中相邻两变速组下降3格;第二变速组最小传动线下降6格,最大上升3格。初步确定的转速图如图1所示。
初步设计确定的转速图 图(b) 确定齿轮齿数后的转速图
假定同一变速组内每对齿轮的齿数和相等,根据教材表2-8(p100- -101),可以确定齿轮的齿数,齿轮齿数确定结果如图2所示。
(4) 确定主轴的计算转速
根据教材表2-9(p103),中型通用机床主轴计算转速为:
 r/min
r/min图(c)设计的主传动系统图
2-29 用于成批生产的车床,主轴转速n=45~500 r/min,为简化机构采用双速电动机,n电=720/1440 r/min,试画出该机床的转速图和传动系图。
解:(1)计算公比确定转速级数
Z=8,
则
, 所以 
(2)确定传动结构式
Z=2×2×2,根据前疏后密原则,考虑到电动机的情况,选择结构式为:
8=22×21×24
其中第一级是由双速电机确定的,实际变速箱的结构式为:4=21×24。
(3) 转速图的设计
根据表3-6标准数列,经圆整可以得到8级转速为:45, 63, 90, 125, 180, 250, 355, 500 r/min
确定定比传动比:取轴Ⅰ的转速值为710, 355r/min,则电机轴与轴Ⅰ的传动比为:
确定各变速组最小传动比
从转速点355 r/min到45r/min共有6格,按照前缓后急的原则,第一变速组最小传动线下降2格;第二变速组最小传动线下降4格。
(4)绘制转速图
初步设计的转速图
最后确定的转速图
(5)传动系简图设计
2-31 求图2-61所示的车床各轴、各齿轮的计算转速。
解:如下图所示,根据教材p103表2-9所示,各轴的计算转速用红色的圈标注在图中,各对齿轮中小齿轮的计算转速用红色箭头标注在图中。
2-32求图2-62中各齿轮、各轴的计算转速。
解:如下图所示,根据教材p103表2-9所示,各轴的计算转速用红色的圈标注在图中,各对齿轮中小齿轮的计算转速用红色箭头标注在图中。
P111-116)
答:主传动采用直流或交流电动机无极调速;驱动电动机和主轴功率的匹配性设计;数控机床的高速主传动设计;采用部件标准、模块化结构设计;柔性化、复合化设计;并联机床设计。
(本题需要适当展开、解释!)
2-36 进给传动与主传动相比较,有哪些不同的特点?
答:机床主传动设计特点:主传动采用恒功率传动;除主轴之外,各轴计算转速为最低转速;转速图为前密后疏结构;采用背轮机构、双公比传动、双速电机等方式。
机床进给传动设计特点:进给传动是恒转矩传动;各传动件的计算转速是其最高转速;转速图为前疏后密结构;变速范围可比主传动大;采用传动间隙消除机构;采用快速空程传动和微量进给机构。
题目解答
答案