题目
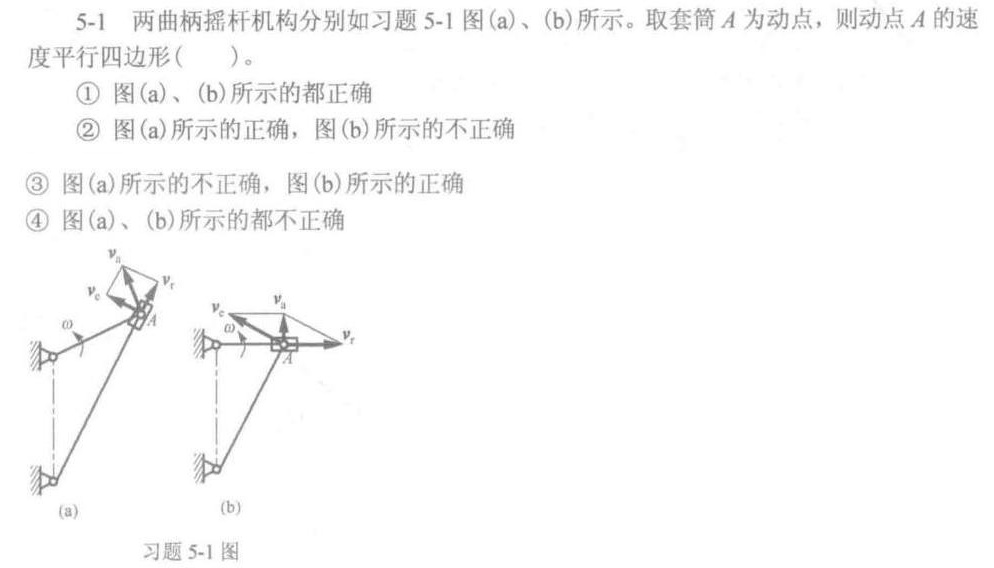
5-1 两曲柄摇杆机构分别如习题 5-1 图(a)、(b)所示。取套筒A为动点,则动点A的速-|||-度平行四边形 () 。-|||-①图(a)、(b)所示的都正确-|||-②图(a)所示的正确,图(b)所示的不正确-|||-③图(a)所示的不正确,图(b)所示的正确-|||-④图(a)、(b)所示的都不正确-|||-va-|||-ve vr-|||-ve va-|||-0.-|||-yr-|||-(a) (b)
题目解答
答案
解析
本题考查曲柄摇杆机构中动点速度平行四边形的正确画法。关键在于判断动点所在构件的运动类型(平移或转动),从而确定是否需要考虑科氏速度。若构件作平移运动,科氏速度为零,速度平行四边形由牵连速度($v_e$)和相对速度($v_r$)组成;若构件作转动,则需包含科氏速度($v_C$)。需结合具体机构运动形式分析各图的正确性。
图(a)分析
假设动点A所在的摇杆作转动,则其速度由三部分组成:
- 牵连速度$v_e$(摇杆转动引起的线速度);
- 相对速度$v_r$(沿摇杆滑动的速度);
- 科氏速度$v_C$(由动点相对转动构件的运动产生)。
若图(a)正确画出上述三个速度矢量的合成,则符合速度平行四边形的定义。
图(b)分析
若图(b)遗漏科氏速度或错误处理其方向,则速度平行四边形不完整。例如,仅考虑$ v_e $和$ v_r $的合成,而未包含$ v_C $,则与实际运动不符。