UG参数化设计技术2.1参数化设计的概念参数化设计是通过改动图形的某一部分或某几部分的尺寸,或修改已定义好的零件参数,自动完成对图形中相关部分的改动,从而实现对图形的驱动。参数驱动的方式便于用户修改和设计。用户在设计轮廓时无需准确地定位和定形,只需勾画出大致轮廓,然后通过修改标注的尺寸值来达到最终的形状,或者只需将零件的关键部分定义为某个参数,通过对参数的修改实现对产品的设计和优化。参数化设计极大地改善了图形的修改手段,提高了设计的柔性,在概念设计,动态设计,实体造型,装配,公差分析与综合,机构仿真,优化设计等领域发挥着越来越大的作用,体现出很高的应用价值。2.2参数化设计的内容UG提供了可以提取特征参数的数据表格,通过数据表格可以生成零件库。它的参数化设计基本内容包括:(l)根据图纸和自由变化参数表确定建模方法;(2)创建参数化模型;(3)设置参数之间的关系,也可在创建模型时设置;(4)提取自由变化参数;(5)创建零件库,输入零件系列数据,创建零件模型;(6)调入生成的模型,检查模型创建是否有误。程序参数化方法允许有经验的用户或二次开发软件工程师来定义产品的参数化模型。UG提供了二次开发的环境,如果利用UGO/PNEAPI或UGO/PNEGRPI创立用户程序,使用UG建模集成在一起,实现设计,建模的自动化,则建模速度将大大提高,改动设计也十分方便,非常适合系列化和标准化常用零件的建模设计。在UG二次开发建模的基础上,以VC十+.60编写开发界面程序,通过用户输入基本的要求,把设计计算步骤通过程序来实现,通过调用动态链接库,在UG启动[1]时使参数自动加载到UG中,完成零件模型的建立。执行代码少,连接速度快,界面简捷直观,操作方便,具有良好的人机交互性,可扩充性。UG二次开发参数化设计的具体实现过程在第五章中有详细的阐述。这种方法通过分析模型的特点,确定样板各尺寸之间的数字关系,给定输入参数,然后确定其它参数的值,并用高级语言编程实现参数化设计,即利用参数化绘图程序生成图形。本文正是用这种方法来实现参数化建模。它的特点是编程量大,程序难以调试,设计复杂程度高,但建立起来程序后利于修改和驱动,其可视化的环境也利于建立。2.3传动机构参数化设计思路UG和大多数的CAD软件一样作为通用支撑软件系统[2],它虽然在CAD/CAM上具有强大的功能,但是它没有提供专用产品所需要的完整计算机辅助设计/制造功能。由于机械产品的千变万化,需要针对具体对象在选用的CAD软件平台上进行二次开发,来设计出界面友好,功能强大和使用方便的专用产品的CAD/CAM系统。如果用户想要提高设计效率缩短设计周期就必须在此基础上进行二次开发。参数化设计的系统的流程图如图2.1所示.本系统通过UG/OPEN的工具,通过用户输入的信息驱动参数尺寸,生成传动机构的设计尺寸。图 2.1系统设计的流程图Fig.2.1 System design flow chart4设置系统环境与配置文件4.1设置系统环境(1)设置UG开发环境打开UG-BAS几DIR/ugii/目录下的ugii_ne.vdat文件(该文件包含Unigrpahics系统的全部环境变量及系统路径定义),找到下向两条语句:#UG_VENDOResesDIR=(UGALLIANC几DIR)vendor#U几SITE_DIR=(UGALLIANC几DIR)site将它们前面的注释符号“#”删除,以便它们起作用。这两条语句其实指明了供用户放置二次开发文件的目录。在Unigrpahies初始安装时,它们不起作用,当删除“#”号后,UG/OPEN才能从这些目录下得到二次开发的功能扩展。(2)设置环境变量在桌面上右击[我的电脑],在弹出的快捷菜单中选择[属性]命令,系统将弹出[系统特性]对话框,选择[高级]选择卡,设置系统的环境变量,可以使UG软件能够接受通过二次开发所编写的一些菜单和程序,从而实现界面设计和参数化建模.本文是在WindowsXP操作系统平台下进行UG软件的二次开发的,对于Windows的其他操作系统,设置的对话框的菜单略有不同,有效的设置不会影响功能的实现。单击其中的[环境变量]按钮,系统将弹出[环境变量]对话框,设置用户变量:uGll_USE_DIR,使它的值为: C:ugpai;设置系统变量:path,使它的值为C:ProgramFiles EDSUnigrpahicsNX2.0UGll。4.2配置文件在C盘根目录下创建ugapi文件夹,在文件夹ugapi根目录下创建application,startup两个子文件夹,A. pplication文件夹用来存放对话框文件.dlg文件。 B. rtup文件夹用来存放UG/OPEN MenuScript文件.men文件和动态连接库文件.dll文件. C. VC和UG之间数据传递的中转,可根据动态库的编写放在所需的位置。 D. 5传动机构设计 E. 5.1导轨与滑块的选用计算 F. 选择导轨有两种方式:一种看静态安全系数值,另一种是看预期寿命。本节中以第一种方式的选择计算为例子,导轨的型号选择基于下面的公式: G. W=1000kgf,本文中直线导轨为4个滑块,也就是说一根导轨上有2个滑块,那么此时,每个滑块的负载为: M导轨,则AMG20是理想的,因为根据查表5.1,它满足Co>1543(kgf)的条件,选择完毕导轨后,根据起型号,选择与之相匹配的滑块。 表5.1直线导轨的承载能力 Tab.1 The bearing capacity of the linear guide 5.2丝杠与支撑单元的选用计算 根据计算的结果,同滚珠丝杠选型表中的运行性能数据,选择滚珠丝杠副型号,给出滚珠丝杠主要尺寸。 鉴于滚珠丝杠选择要考虑的因素很多,不仅仅取决于计算数据,还受到启动和运行等因素的影响,公称直径与承载能力直接有关,有关资料推荐滚珠丝杠副的公称直径在大于丝杠工作长度的1/30时,能够满足滚珠丝杠承载能力的要求。数控机床常用的进给丝杠,公称直径取一般在20mm一80mm导程的大小根据的加工精度要求确定,精度要求高时,应将导程取小些,可减小杠上的摩擦阻力,但导程取小后,势必将滚珠直径取小,使滚珠丝杠副的承载能力降低。若丝杠副的公称直径不变,导程小,则螺旋升角也小,传动效率也变小。因此,导程的数值在满足加工精度的条件下尽可能取大些。 根据以上的分析,本文采用滚珠丝杠,直线导轨为传动部件,并对基于此类的传动机构进行了参数化的设计和选型。 5.3驱动装置的选用 机器人的驱动器类型可以能源形式分为:电动驱动器,液压驱动器,气动驱动器和其它形式驱动。其中电动驱动器是目前使用的最为广泛的驱动器。交流伺服电机的能源简单,速度变化范围大,效率高,速度和位置精度都很高。交流伺服电动机没有电刷和换向器,结构简单,运行可靠,对其它仪器不产生无线电干扰等结构特点,从结构上避免直流伺服电动机由于电刷磨损造成的不利因素,同时其工作性能接近于直流伺服电动机性能。交流伺服电机具有控制精度高,运行平稳,起动转矩大,过载能力强和响应速度快等优点,正逐渐地取代直流伺服电机而成为机器人的主要驱动器,因此在对此类机器人传动伺服驱动系统中选用交流伺服电动机中的三相永磁交流伺服电动机作为关节的驱动电机。 减速器的选用标准主要就是回程要小,这样才能满足控制精度的要求。行星轮减速器具有高度的可靠性,采用低背隙磨削齿轮副啮合,因此可以低转矩运转。传动比整数化负载平均分配到行星齿轮上,具有很高的扭转刚度。行星齿轮箱具有非常高的效率,采用了噪音优化轮副,噪音等级很低,低惯量,高动态,结构紧凑,质量轻。广泛应用于加工机床,机器人和自动化工程方面。 根据以上的分析,本文采用交流永磁同步伺服电机和精密行星轮减速器为驱动部件,对此类的驱动部件进行了参数化的选型。
UG参数化设计技术
2.1参数化设计的概念
参数化设计是通过改动图形的某一部分或某几部分的尺寸,或修改已定义好的零件参数,自动完成对图形中相关部分的改动,从而实现对图形的驱动。参数驱动的方式便于用户修改和设计。用户在设计轮廓时无需准确地定位和定形,只需勾画出大致轮廓,然后通过修改标注的尺寸值来达到最终的形状,或者只需将零件的关键部分定义为某个参数,通过对参数的修改实现对产品的设计和优化。参数化设计极大地改善了图形的修改手段,提高了设计的柔性,在概念设计,动态设计,实体造型,装配,公差分析与综合,机构仿真,优化设计等领域发挥着越来越大的作用,体现出很高的应用价值。
2.2参数化设计的内容
UG提供了可以提取特征参数的数据表格,通过数据表格可以生成零件库。它的参数化设计基本内容包括:
(l)根据图纸和自由变化参数表确定建模方法;
(2)创建参数化模型;
(3)设置参数之间的关系,也可在创建模型时设置;
(4)提取自由变化参数;
(5)创建零件库,输入零件系列数据,创建零件模型;
(6)调入生成的模型,检查模型创建是否有误。
程序参数化方法允许有经验的用户或二次开发软件工程师来定义产品的参数化模型。UG提供了二次开发的环境,如果利用UGO/PNEAPI或UGO/PNEGRPI创立用户程序,使用UG建模集成在一起,实现设计,建模的自动化,则建模速度将大大提高,改动设计也十分方便,非常适合系列化和标准化常用零件的建模设计。在UG二次开发建模的基础上,以VC十+.60编写开发界面程序,通过用户输入基本的要求,把设计计算步骤通过程序来实现,通过调用动态链接库,在UG启动[1]时使参数自动加载到UG中,完成零件模型的建立。执行代码少,连接速度快,界面简捷直观,操作方便,具有良好的人机交互性,可扩充性。UG二次开发参数化设计的具体实现过程在第五章中有详细的阐述。
这种方法通过分析模型的特点,确定样板各尺寸之间的数字关系,给定输入参数,然后确定其它参数的值,并用高级语言编程实现参数化设计,即利用参数化绘图程序生成图形。本文正是用这种方法来实现参数化建模。它的特点是编程量大,程序难以调试,设计复杂程度高,但建立起来程序后利于修改和驱动,其可视化的环境也利于建立。
2.3传动机构参数化设计思路
UG和大多数的CAD软件一样作为通用支撑软件系统[2],它虽然在CAD/CAM上具有强大的功能,但是它没有提供专用产品所需要的完整计算机辅助设计/制造功能。由于机械产品的千变万化,需要针对具体对象在选用的CAD软件平台上进行二次开发,来设计出界面友好,功能强大和使用方便的专用产品的CAD/CAM系统。如果用户想要提高设计效率缩短设计周期就必须在此基础上进行二次开发。参数化设计的系统的流程图如图2.1所示.本系统通过UG/OPEN的工具,通过用户输入的信息驱动参数尺寸,生成传动机构的设计尺寸。
图 2.1系统设计的流程图
Fig.2.1 System design flow chart
4设置系统环境与配置文件
4.1设置系统环境
(1)设置UG开发环境
打开$UG-BAS几DIR/ugii/目录下的ugii_ne.vdat文件(该文件包含Unigrpahics系统的全部环境变量及系统路径定义),找到下向两条语句:
#UG_VENDOResesDIR=${UGALLIANC几DIR}\vendor
#U几SITE_DIR=${UGALLIANC几DIR}\site
将它们前面的注释符号“#”删除,以便它们起作用。这两条语句其实指明了供用户放置二次开发文件的目录。在Unigrpahies初始安装时,它们不起作用,当删除“#”号后,UG/OPEN才能从这些目录下得到二次开发的功能扩展。
(2)设置环境变量
在桌面上右击[我的电脑],在弹出的快捷菜单中选择[属性]命令,系统将弹出[系统特性]对话框,选择[高级]选择卡,设置系统的环境变量,可以使UG软件能够接受通过二次开发所编写的一些菜单和程序,从而实现界面设计和参数化建模.本文是在WindowsXP操作系统平台下进行UG软件的二次开发的,对于Windows的其他操作系统,设置的对话框的菜单略有不同,有效的设置不会影响功能的实现。
单击其中的[环境变量]按钮,系统将弹出[环境变量]对话框,设置用户变量:uGll_USE_DIR,使它的值为: C:\\ugpai;设置系统变量:path,使它的值为C:\\ProgramFiles\ EDS\UnigrpahicsNX2.0\UGll。
4.2配置文件
在C盘根目录下创建ugapi文件夹,在文件夹ugapi根目录下创建application,
startup两个子文件夹,
A. pplication文件夹用来存放对话框文件.dlg文件。B. rtup文件夹用来存放UG/OPEN MenuScript文件.men文件和动态连接库文件.dll文件.
C. VC和UG之间数据传递的中转,可根据动态库的编写放在所需的位置。
D. 5传动机构设计
E. 5.1导轨与滑块的选用计算
F. 选择导轨有两种方式:一种看静态安全系数值,另一种是看预期寿命。本节中以第一种方式的选择计算为例子,导轨的型号选择基于下面的公式:
G.

W=1000kgf,本文中直线导轨为4个滑块,也就是说一根导轨上有2个滑块,那么此时,每个滑块的负载为:
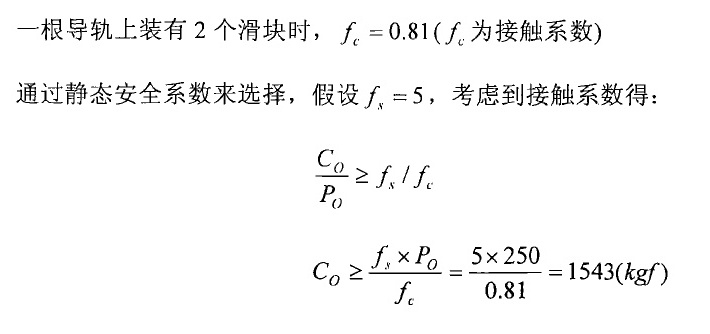
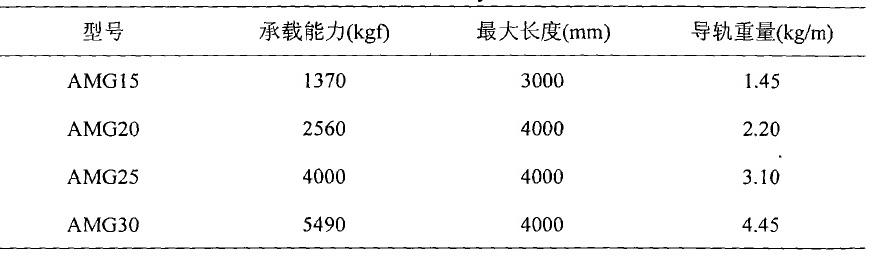
M导轨,则AMG20是理想的,因为根据查表5.1,它满足Co>1543(kgf)的条件,选择完毕导轨后,根据起型号,选择与之相匹配的滑块。
表5.1直线导轨的承载能力
Tab.1 The bearing capacity of the linear guide
5.2丝杠与支撑单元的选用计算
根据计算的结果,同滚珠丝杠选型表中的运行性能数据,选择滚珠丝杠副型号,给出滚珠丝杠主要尺寸。
鉴于滚珠丝杠选择要考虑的因素很多,不仅仅取决于计算数据,还受到启动和运行等因素的影响,公称直径
 与承载能力直接有关,有关资料推荐滚珠丝杠副的公称直径在大于丝杠工作长度的1/30时,能够满足滚珠丝杠承载能力的要求。数控机床常用的进给丝杠,公称直径取一般在20mm一80mm导程的大小根据的加工精度要求确定,精度要求高时,应将导程取小些,可减小杠上的摩擦阻力,但导程取小后,势必将滚珠直径取小,使滚珠丝杠副的承载能力降低。若丝杠副的公称直径不变,导程小,则螺旋升角也小,传动效率也变小。因此,导程的数值在满足加工精度的条件下尽可能取大些。
与承载能力直接有关,有关资料推荐滚珠丝杠副的公称直径在大于丝杠工作长度的1/30时,能够满足滚珠丝杠承载能力的要求。数控机床常用的进给丝杠,公称直径取一般在20mm一80mm导程的大小根据的加工精度要求确定,精度要求高时,应将导程取小些,可减小杠上的摩擦阻力,但导程取小后,势必将滚珠直径取小,使滚珠丝杠副的承载能力降低。若丝杠副的公称直径不变,导程小,则螺旋升角也小,传动效率也变小。因此,导程的数值在满足加工精度的条件下尽可能取大些。根据以上的分析,本文采用滚珠丝杠,直线导轨为传动部件,并对基于此类的传动机构进行了参数化的设计和选型。
5.3驱动装置的选用
机器人的驱动器类型可以能源形式分为:电动驱动器,液压驱动器,气动驱动器和其它形式驱动。其中电动驱动器是目前使用的最为广泛的驱动器。交流伺服电机的能源简单,速度变化范围大,效率高,速度和位置精度都很高。交流伺服电动机没有电刷和换向器,结构简单,运行可靠,对其它仪器不产生无线电干扰等结构特点,从结构上避免直流伺服电动机由于电刷磨损造成的不利因素,同时其工作性能接近于直流伺服电动机性能。交流伺服电机具有控制精度高,运行平稳,起动转矩大,过载能力强和响应速度快等优点,正逐渐地取代直流伺服电机而成为机器人的主要驱动器,因此在对此类机器人传动伺服驱动系统中选用交流伺服电动机中的三相永磁交流伺服电动机作为关节的驱动电机。
减速器的选用标准主要就是回程要小,这样才能满足控制精度的要求。行星轮减速器具有高度的可靠性,采用低背隙磨削齿轮副啮合,因此可以低转矩运转。传动比整数化负载平均分配到行星齿轮上,具有很高的扭转刚度。行星齿轮箱具有非常高的效率,采用了噪音优化轮副,噪音等级很低,低惯量,高动态,结构紧凑,质量轻。广泛应用于加工机床,机器人和自动化工程方面。
根据以上的分析,本文采用交流永磁同步伺服电机和精密行星轮减速器为驱动部件,对此类的驱动部件进行了参数化的选型。
题目解答
答案
The bearing capacity of the linear guide
解析
题目围绕UG参数化设计技术展开,涵盖参数化设计概念、内容、传动机构参数化设计思路及相关零部件选用计算等内容。问题要求根据文本信息给出答案,文本中“表5.1直线导轨的承载能力”的英文对应项为“The bearing capacity of the linear guide”,此即为题目所指答案。