题目
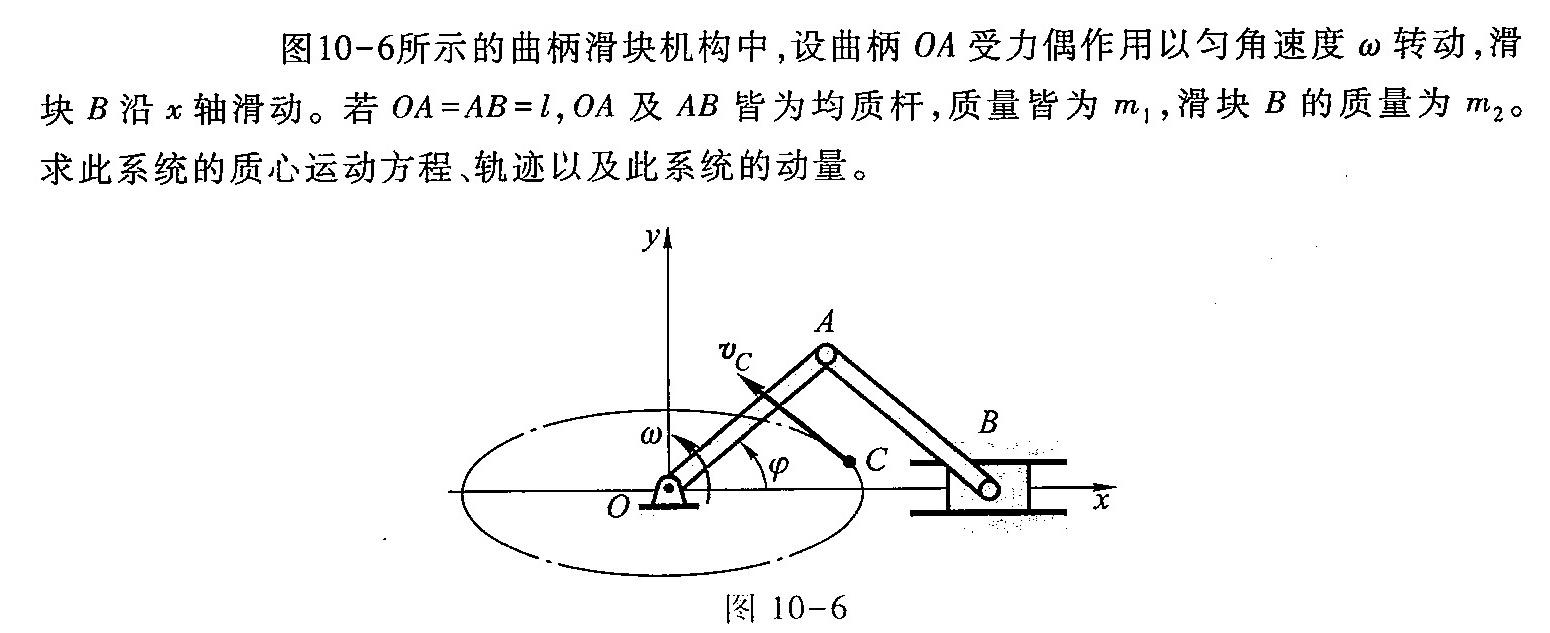
图 10-6 所示的曲柄滑块机构中,设曲柄OA受力偶作用以匀角速度w转动,滑-|||-块B沿x轴滑动。若 =AB=1, OA及AB皆为均质杆,质量皆为m1,滑块B的质量为m20-|||-求此系统的质心运动方程、轨迹以及此系统的动量。-|||-y4-|||-A-|||-vc Q-|||-w B-|||-φ C-|||-x-|||-图 10-6
题目解答
答案
解析
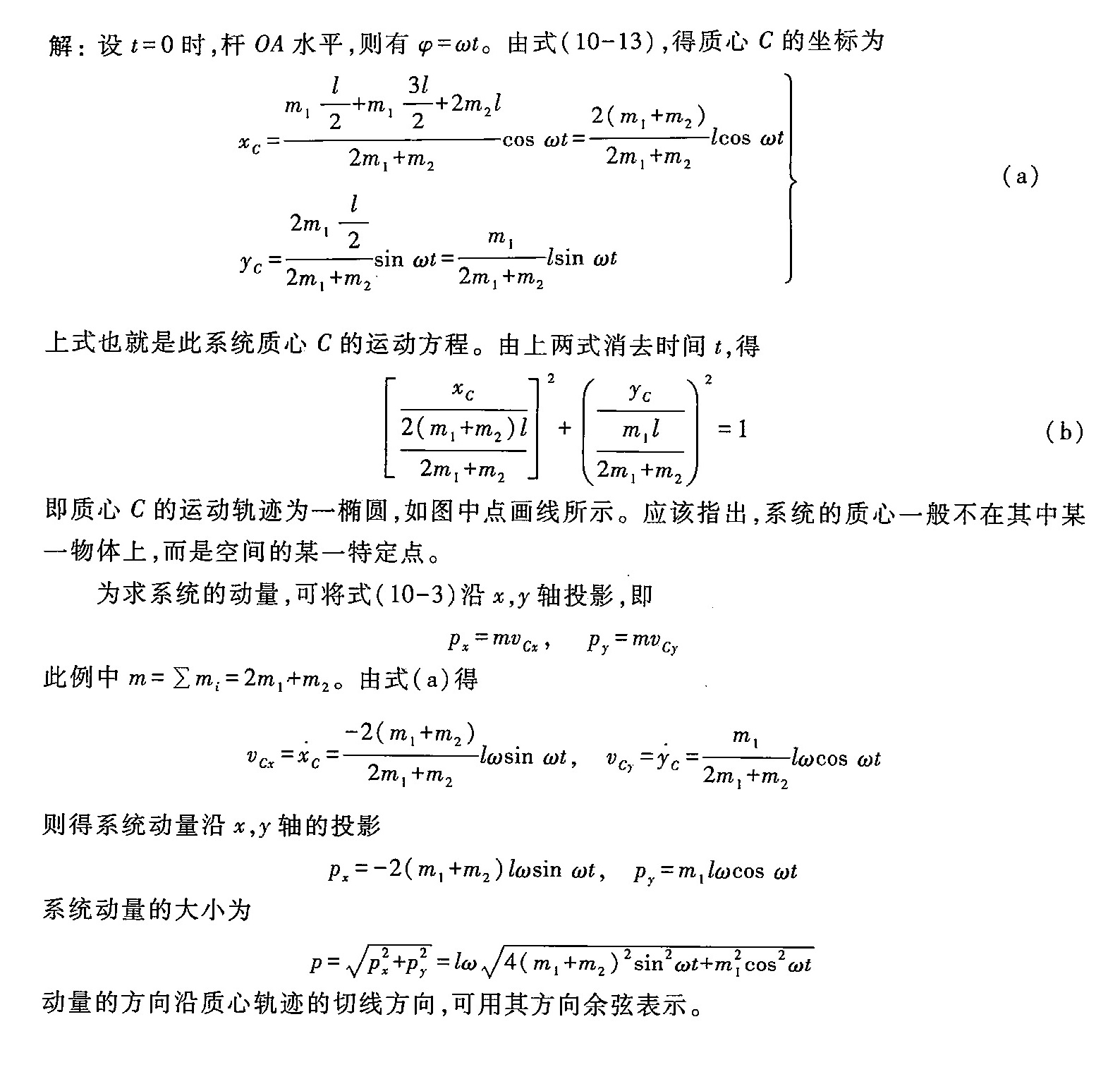
步骤 1:确定质心位置
质心C的坐标可以通过质心公式计算。质心公式为:
\[ x_C = \frac{\sum m_i x_i}{\sum m_i} \]
\[ y_C = \frac{\sum m_i y_i}{\sum m_i} \]
其中,\(m_i\)是每个物体的质量,\(x_i\)和\(y_i\)是每个物体的质心坐标。
步骤 2:计算质心坐标
对于曲柄滑块机构,质心C的坐标为:
\[ x_C = \frac{m_1 \cdot \frac{l}{2} + m_1 \cdot l + m_2 \cdot l}{2m_1 + m_2} = \frac{2m_1l + m_2l}{2m_1 + m_2} \]
\[ y_C = \frac{m_1 \cdot \frac{l}{2} \sin(\omega t)}{2m_1 + m_2} = \frac{m_1l \sin(\omega t)}{2m_1 + m_2} \]
步骤 3:确定质心运动轨迹
质心C的运动轨迹可以通过消去时间t来确定。由质心坐标公式,消去时间t,得到:
\[ x_C = \frac{2m_1l + m_2l}{2m_1 + m_2} \]
\[ y_C = \frac{m_1l \sin(\omega t)}{2m_1 + m_2} \]
消去时间t,得到质心C的运动轨迹为:
\[ \left(\frac{x_C}{l} - \frac{2m_1 + m_2}{2m_1 + m_2}\right)^2 + \left(\frac{y_C}{l}\right)^2 = 1 \]
这是一个椭圆方程。
步骤 4:计算系统的动量
系统的动量可以通过质心的速度来计算。质心的速度为:
\[ v_{Cx} = \frac{dx_C}{dt} = 0 \]
\[ v_{Cy} = \frac{dy_C}{dt} = \frac{m_1l \omega \cos(\omega t)}{2m_1 + m_2} \]
系统的动量为:
\[ P_x = m v_{Cx} = 0 \]
\[ P_y = m v_{Cy} = (2m_1 + m_2) \frac{m_1l \omega \cos(\omega t)}{2m_1 + m_2} = m_1l \omega \cos(\omega t) \]
系统的动量大小为:
\[ P = \sqrt{P_x^2 + P_y^2} = m_1l \omega \cos(\omega t) \]
动量的方向沿质心轨迹的切线方向,可用其方向余弦表示。
质心C的坐标可以通过质心公式计算。质心公式为:
\[ x_C = \frac{\sum m_i x_i}{\sum m_i} \]
\[ y_C = \frac{\sum m_i y_i}{\sum m_i} \]
其中,\(m_i\)是每个物体的质量,\(x_i\)和\(y_i\)是每个物体的质心坐标。
步骤 2:计算质心坐标
对于曲柄滑块机构,质心C的坐标为:
\[ x_C = \frac{m_1 \cdot \frac{l}{2} + m_1 \cdot l + m_2 \cdot l}{2m_1 + m_2} = \frac{2m_1l + m_2l}{2m_1 + m_2} \]
\[ y_C = \frac{m_1 \cdot \frac{l}{2} \sin(\omega t)}{2m_1 + m_2} = \frac{m_1l \sin(\omega t)}{2m_1 + m_2} \]
步骤 3:确定质心运动轨迹
质心C的运动轨迹可以通过消去时间t来确定。由质心坐标公式,消去时间t,得到:
\[ x_C = \frac{2m_1l + m_2l}{2m_1 + m_2} \]
\[ y_C = \frac{m_1l \sin(\omega t)}{2m_1 + m_2} \]
消去时间t,得到质心C的运动轨迹为:
\[ \left(\frac{x_C}{l} - \frac{2m_1 + m_2}{2m_1 + m_2}\right)^2 + \left(\frac{y_C}{l}\right)^2 = 1 \]
这是一个椭圆方程。
步骤 4:计算系统的动量
系统的动量可以通过质心的速度来计算。质心的速度为:
\[ v_{Cx} = \frac{dx_C}{dt} = 0 \]
\[ v_{Cy} = \frac{dy_C}{dt} = \frac{m_1l \omega \cos(\omega t)}{2m_1 + m_2} \]
系统的动量为:
\[ P_x = m v_{Cx} = 0 \]
\[ P_y = m v_{Cy} = (2m_1 + m_2) \frac{m_1l \omega \cos(\omega t)}{2m_1 + m_2} = m_1l \omega \cos(\omega t) \]
系统的动量大小为:
\[ P = \sqrt{P_x^2 + P_y^2} = m_1l \omega \cos(\omega t) \]
动量的方向沿质心轨迹的切线方向,可用其方向余弦表示。