形状和位置公差各规定了哪些项目?它们的符号是什么?答:形位公差项目分为14种,各项目的名称及符号下表所示:分类项 目特征符号有或无基准要求形状公差形状直线度 无平面度无圆度无圆柱度无形状或位置轮廓线轮廓度有或无面轮廓度有或无位置公差定向平行度有垂直度有倾斜度有定位位置度有或无同轴度[1](同心度)有对称度有跳动圆跳动有跳动全跳动有4-2、试解释图中注出的各项形位公差,要求说明公差项目名称、被测要素、基准要素和公差带的形状、大小和位置。答:0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D:当零件绕公共基准轴线A-B作无轴向移动回转时,被测圆锥面在任一测量平面内的斜向跳动量均不得大于公差值0.025mm。0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D:被测中心平面必须位于距离为公差值0.025mm,且相对基准中心线F对称配置的两平行平面之间。0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D:被测圆柱面必须位于半径差为公差值0.01mm的两同轴圆柱面之间。0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D:被测轴线必须位于距离为公差值0.02mm ,且在给定方向上平行于公共基准轴线A-B的两平行平面之间。0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D:当零件绕公共基准轴线C-D作无轴向移动回转时,被测圆柱面在任一测量平面内的径向跳动量均不得大于公差值0.025mm。0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D:被测圆柱面必须位于半径差为公差值0.006mm的两同轴圆柱面之间。4-3 下列形位公差特征项目的公差带有何差异?(1)圆度和径向跳动公差带。(2)端面对轴线的垂直度和端面全跳动公差带。(3)圆柱度和径向全跳动公差带。答:(1)径向圆跳动公差带与圆度公差带在形状方面相同,但前者公差带圆心的位置是固定,而后者公差带圆心的位置是浮动。(2)端面全跳动公差带与回转体端面垂直度公差带形状一样,均为垂直于基准轴线的一对平行平面。公差带的另三个要素,只要公差值相同,则大小、方向、位置完全相同。(3)径向全跳动公差带与圆柱度公差带形状相同,区别在于径向全跳动公差带必须与基准轴线同轴,位置是固定的。而圆柱度公差带的轴线则与其它无关,位置浮动。4-4, 什么叫最小条件?为什么要规定最小条件?评定位置误差的最小包容区域与评定形状误差的最小包容区域有何不同?答; 被测实际要素对其理想要素的最大变动量为最小,叫最小条件.被测实际要素对其理想要素进行比较时,理想要素对于实际要素的位置不同,评定的形状误差值也不同.为了使评定结果唯一所以要规定最小条件.形状误差的最小包容区域与形状公差带形状相同,它的方向和位置是浮动的.定向误差最小包容区域与定向公差带形状相同,在相对于基准保持确定方向的条件下,位置是可以浮动的。定位误差最小包容区域与定位公差带形状相同,相对于基准具有确定的方向和位置。4-5、试述独立原则、包容要求、最大实体要求和最小实体要求的应用场合。答:(1)独立原则的应用场合1)尺寸精度和形位精度都要求较高,并需要分别满足要求的场合。2)尺寸精度与形位精度要求相差较大的场合。3)尺寸精度与形位精度无关的场合。4)零件上的未注形位公差一律遵循独立原则。(2)包容要求的应用场合包容要求主要用于必须保证配合性质的场合,特别是要求精密配合的场合,用最大实体边界保证必要的最小间隙或最大过盈,用最小实体尺寸防止间隙过大或过盈过小。(3)最大实体要求的应用场合最大实体要求常用于对零件配合性质要求不严,但要求顺利保证零件可装配性的场合,例如用于法兰盘上的连接用孔组或轴承端盖上的连接用孔组的位置度公差。(4)最小实体要求的应用场合最小实体要求常用于保证零件的最小壁厚,以保证必要的强度要求的场合,例如空心圆柱的凸台、带孔的小垫圈等的位置度公差。4-6、按图4-34的标注填表。A. B. C. D. MM(d) 0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D(e) E. 图4-34 F. 的垂直度误差为φ0.04mm,试判断其垂直度是否合格?为什么?mM G. 解;根据标注,当工件圆柱直径为19.97mm时与最大实体尺寸φ20偏离了φ0.03mm,可补赏给轴线的垂直度公差,这时垂直度公差可为φ0.05mm,现在垂直度公差为φ0.04mm,小于公差,所以合格.4-8 同一要素的形状公差,定向位置公差,定位位置公差间有何联系?它们的公差值应保持何种关系?答; 同一要素的定位位置公差具有综合控制方向和形状的功能.它们的公差值应保持定位位置公差大于定向位置公差,定向位置公差大于形状公差.4-9 对某一圆柱面给定径向圆跳动公差t,能否说径向圆跳动未超差.则圆度误差也肯定未超差t?为什么?答; 对某一圆柱面给定径向圆跳动公差t,该圆柱面如果合格径向圆跳动误差未超差.则圆度误差也肯定未超差t.因为径向圆跳动公差具有综合控制方向和形状的功能.所以圆度误差未超差.h,实际尺寸的最大差值为0.03mm,否说平行度误差一定不会超差?0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D解;平面度公差0.03mm小于0.05mm可以肯定平行度误差一定不会超差.4-11、指出图3-51两图形中的形位公差的标注错误,并改正。(注意:不能改变形位公差项目符号)。0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D0.01 0.02 _(2)-(E)_(1) 两处-|||-0.025 C-D-|||-0.025 _(2)-(E)_(1) 0.006-|||-θ--|||-= 0.025 F-|||-θ--|||-θ-|||-90-|||-F ⑧ A-|||-中心孔B6 C-|||-D
形状和位置公差各规定了哪些项目?它们的符号是什么?
答:形位公差项目分为14种,各项目的名称及符号下表所示:
分类
项 目
特征符号
有或无基准要求
形状公差
形状
直线度
无
平面度
无
圆度
无
圆柱度
无
形状或位置
轮廓
线轮廓度
有或无
面轮廓度
有或无
位置公差
定向
平行度
有
垂直度
有
倾斜度
有
定位
位置度
有或无
同轴度[1](同心度)
有
对称度
有
跳动
圆跳动
有
跳动
全跳动
有
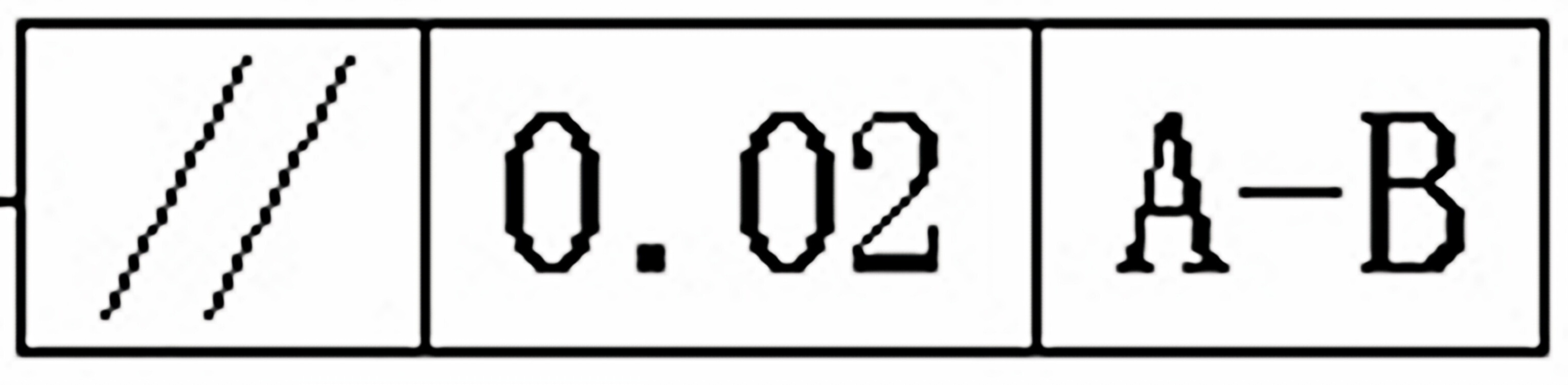
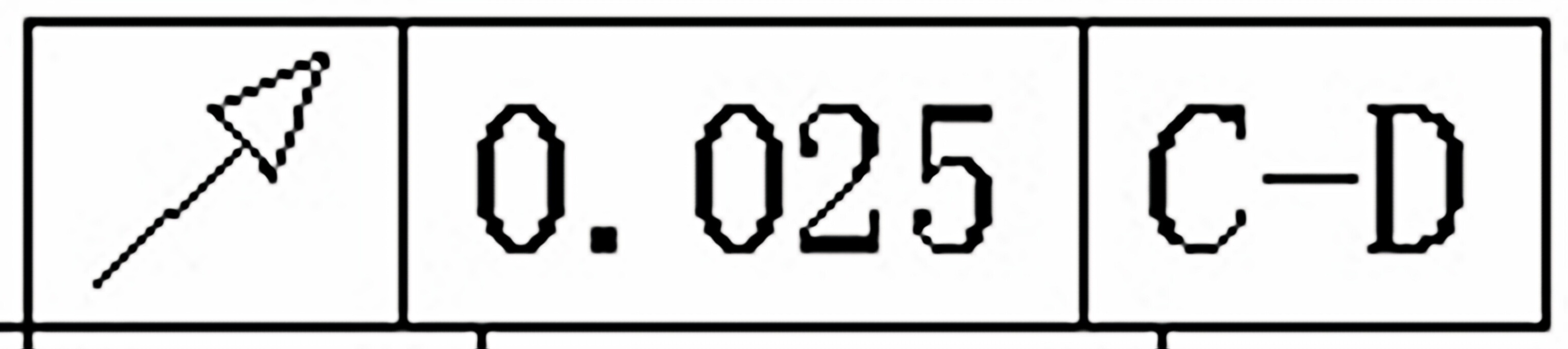
4-2、试解释图中注出的各项形位公差,要求说明公差项目名称、被测要素、基准要素和公差带的形状、大小和位置。
答: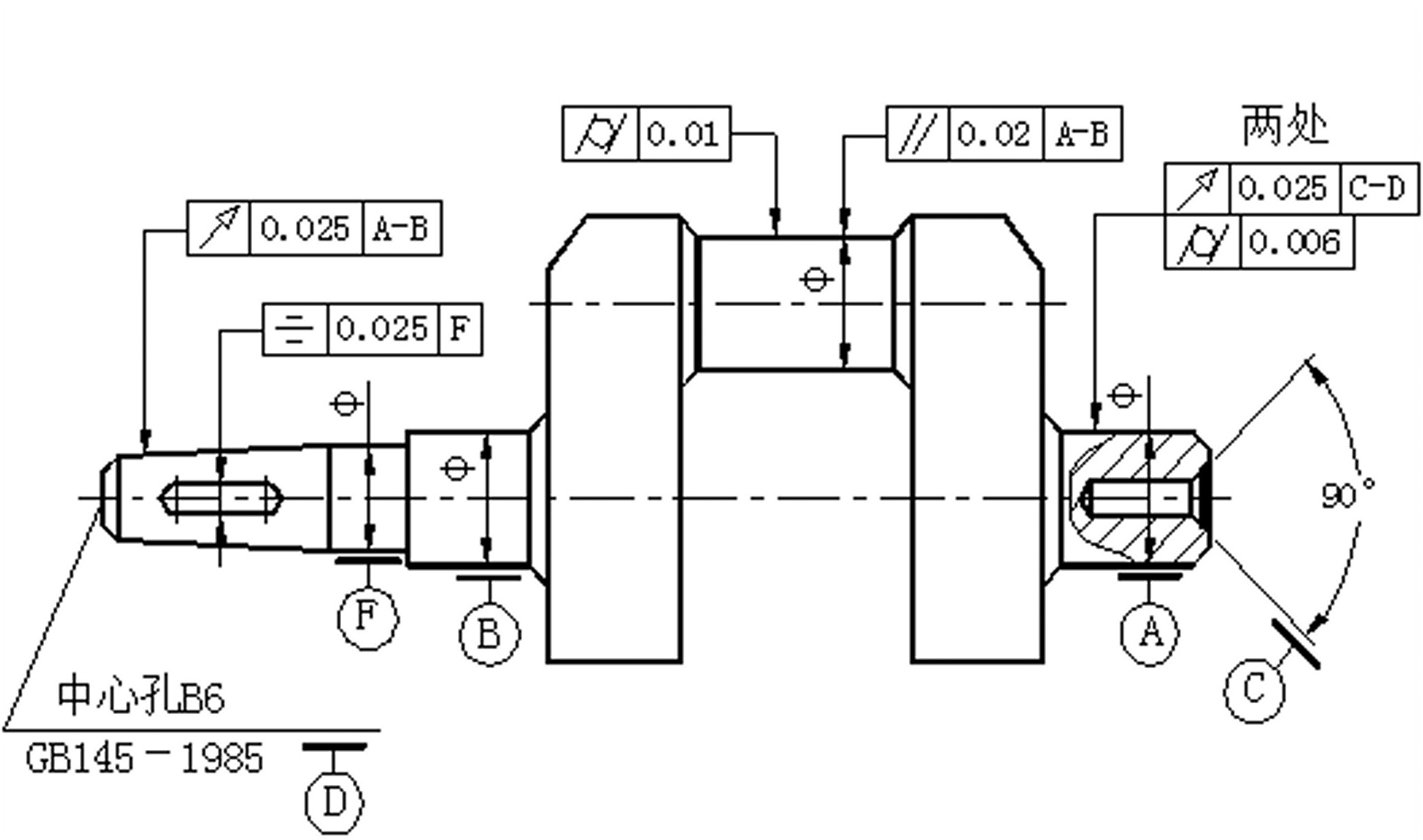 :当零件绕公共基准轴线A-B作无轴向移动回转时,被测圆锥面在任一测量平面内的斜向跳动量均不得大于公差值0.025mm。
:当零件绕公共基准轴线A-B作无轴向移动回转时,被测圆锥面在任一测量平面内的斜向跳动量均不得大于公差值0.025mm。
 :被测中心平面必须位于距离为公差值0.025mm,且相对基准中心线F对称配置的两平行平面之间。
:被测中心平面必须位于距离为公差值0.025mm,且相对基准中心线F对称配置的两平行平面之间。
 :被测圆柱面必须位于半径差为公差值0.01mm的两同轴圆柱面之间。
:被测圆柱面必须位于半径差为公差值0.01mm的两同轴圆柱面之间。
 :被测轴线必须位于距离为公差值0.02mm ,且在给定方向上平行于公共基准轴线A-B的两平行平面之间。
:被测轴线必须位于距离为公差值0.02mm ,且在给定方向上平行于公共基准轴线A-B的两平行平面之间。
 :当零件绕公共基准轴线C-D作无轴向移动回转时,被测圆柱面在任一测量平面内的径向跳动量均不得大于公差值0.025mm。
:当零件绕公共基准轴线C-D作无轴向移动回转时,被测圆柱面在任一测量平面内的径向跳动量均不得大于公差值0.025mm。
 :被测圆柱面必须位于半径差为公差值0.006mm的两同轴圆柱面之间。
:被测圆柱面必须位于半径差为公差值0.006mm的两同轴圆柱面之间。
4-3 下列形位公差特征项目的公差带有何差异?
(1)圆度和径向跳动公差带。
(2)端面对轴线的垂直度和端面全跳动公差带。
(3)圆柱度和径向全跳动公差带。
答:(1)径向圆跳动公差带与圆度公差带在形状方面相同,但前者公差带圆心的位置是固定,而后者公差带圆心的位置是浮动。
(2)端面全跳动公差带与回转体端面垂直度公差带形状一样,均为垂直于基准轴线的一对平行平面。公差带的另三个要素,只要公差值相同,则大小、方向、位置完全相同。
(3)径向全跳动公差带与圆柱度公差带形状相同,区别在于径向全跳动公差带必须与基准轴线同轴,位置是固定的。而圆柱度公差带的轴线则与其它无关,位置浮动。
4-4, 什么叫最小条件?为什么要规定最小条件?评定位置误差的最小包容区域与评定形状误差的最小包容区域有何不同?
答; 被测实际要素对其理想要素的最大变动量为最小,叫最小条件.被测实际要素对其理想要素进行比较时,理想要素对于实际要素的位置不同,评定的形状误差值也不同.为了使评定结果唯一所以要规定最小条件.
形状误差的最小包容区域与形状公差带形状相同,它的方向和位置是浮动的.
定向误差最小包容区域与定向公差带形状相同,在相对于基准保持确定方向的条件下,位置是可以浮动的。
定位误差最小包容区域与定位公差带形状相同,相对于基准具有确定的方向和位置。
4-5、试述独立原则、包容要求、最大实体要求和最小实体要求的应用场合。
答:(1)独立原则的应用场合
1)尺寸精度和形位精度都要求较高,并需要分别满足要求的场合。
2)尺寸精度与形位精度要求相差较大的场合。
3)尺寸精度与形位精度无关的场合。
4)零件上的未注形位公差一律遵循独立原则。
(2)包容要求的应用场合
包容要求主要用于必须保证配合性质的场合,特别是要求精密配合的场合,用最大实体边界保证必要的最小间隙或最大过盈,用最小实体尺寸防止间隙过大或过盈过小。
(3)最大实体要求的应用场合
最大实体要求常用于对零件配合性质要求不严,但要求顺利保证零件可装配性的场合,例如用于法兰盘上的连接用孔组或轴承端盖上的连接用孔组的位置度公差。
(4)最小实体要求的应用场合
最小实体要求常用于保证零件的最小壁厚,以保证必要的强度要求的场合,例如空心圆柱的凸台、带孔的小垫圈等的位置度公差。
4-6、按图4-34的标注填表。
A.B.
C.
D. MM(d)

 (e)
(e)E. 图4-34
F. 的垂直度误差为φ0.04mm,试判断其垂直度是否合格?为什么?mM
G. 解;根据标注,当工件圆柱直径为19.97mm时与最大实体尺寸φ20偏离了φ0.03mm,可补赏给轴线的垂直度公差,这时垂直度公差可为φ0.05mm,现在垂直度公差为φ0.04mm,小于公差,所以合格.
4-8 同一要素的形状公差,定向位置公差,定位位置公差间有何联系?它们的公差值应保持何种关系?
答; 同一要素的定位位置公差具有综合控制方向和形状的功能.它们的公差值应保持定位位置公差大于定向位置公差,定向位置公差大于形状公差.
4-9 对某一圆柱面给定径向圆跳动公差t,能否说径向圆跳动未超差.则圆度误差也肯定未超差t?为什么?
答; 对某一圆柱面给定径向圆跳动公差t,该圆柱面如果合格径向圆跳动误差未超差.则圆度误差也肯定未超差t.因为径向圆跳动公差具有综合控制方向和形状的功能.所以圆度误差未超差.
h,实际尺寸的最大差值为0.03mm,否说平行度误差一定不会超差?

解;平面度公差0.03mm小于0.05mm可以肯定平行度误差一定不会超差.
4-11、指出图3-51两图形中的形位公差的标注错误,并改正。(注意:不能改变形位公差项目符号)。


题目解答
答案
z1要2的3位位置公4具有5合控制方6和形状的7能8 . 90的*差值应保@定位位置!~大于a向位置b差 c 定d位置公ef于形状公g h