题目
钢调质 D. ZCuSnIOPbl(9)在蜗杆传动中,轮齿承载能力计算,主要是针对 D 来进行的。A. 蜗杆齿面接触强度和蜗轮齿根弯曲强度 B. 蜗轮齿面接触强度和蜗杆齿根弯曲强度 C. 蜗杆齿面接触强度和蜗杆齿根弯曲强度⏺ D. 蜗轮齿面接触强度和蜗轮齿根弯曲强度 E. 。 F. 防止润滑油受热后外溢,造成环境污染 G. 防止润滑油温度过高使润滑条件恶化 防止蜗轮材料在高温下力学性能下降 防止蜗轮蜗杆发生热变形后正确啮合受到 破坏 向是正确的。 (Q (D) 图 11-1 ti、轴向力Fai分别与蜗轮所 _ 、 A 大小相等,方向相反。 圆周力Ft2 轴向力Fa2 r2 不是蜗杆传动的优 点。 传动平稳,噪声小 传 动比可以很大 可以自锁 传动效率高 。 1、2、4、6 2~5 3~6 4~8 。 蜗杆主动,蜗轮从动 蜗 轮主动,蜗杆从动 蜗杆或蜗轮主动 增速传动 。 保证蜗杆有足够的刚度 提高蜗杆传动的效率 利于蜗轮滚刀的标准化 便于蜗杆刀具的标准化 。 不变 改变 不一定改变 是否改变由设计者确定 (18)蜗轮轮缘与轮毂采用不同材料的目的是为了 。 加工方便 提高精度 节约有色金属 减轻重量 I轴的转向,欲提升重物 W, 。 右、右 右、左 左、右 I-|||-小-|||-n-|||-x-|||-x 三Ⅱ-|||-Ⅲ-|||-蜗轮-|||-卷筒-|||-w 图 11-2 _B 。 钢和铸铁 钢和青铜 钢和铝合金 钢和钢 (21)在蜗杆传动的强度计算中,若蜗轮的材料选用 有 关。 蜗轮的铸造方法 蜗杆与蜗轮齿面间的相对滑动速度 应力循环次数 蜗轮受双向载荷还是单向载荷 (22)蜗杆减速器采用风扇冷却时,风扇应装在 —。 蜗杆轴上 蜗轮轴上 较高的(上面的)轴上 较低的(下面的)轴上 (23)蜗杆传动中,蜗轮的轮缘通常采用青铜,蜗杆 _。 强度高 减摩耐磨性好 加 价格便宜 HT20O的开式蜗杆传动,其主要 。 齿面点蚀 齿面磨损 齿 蜗轮轮齿折断 (25)在其他条件相同时,若增加蜗杆头数,则齿面 。 增加 保持不变 减 可能增加或减小 。 增加蜗轮齿数Z2 Zi 减小模数m 增大蜗杆直径系数q 公式计算。 d^mq ・ d^mzi ^mq B・ d^mzi C・ di 匹 nh d1 =2a -d2 (28)蜗杆传动热平衡计算的目的是为了控制温升, _ 。 蜗杆力学性能下降 润滑油变质和胶合 传动效率下降 蜗轮材料退火 。 增大蜗杆的分度圆直径 di 采用高强度合金钢制造蜗杆 提高蜗杆硬度和降低表面粗糙度 增加蜗杆头数 ⏺ 当量摩擦角 大于 等于 小于或等于 (31)蜗杆传动在单位时间内的发热量, 来进行计算的。 传递的功率p与传动效率 杆的转速ni与传动效率 传动比i和传动效率 Vs ^ 40,转速n^50r/min, 则蜗杆传动啮合节点的相对滑动速度vs等干 D m/s o 6.63 _力的影响。 径向 轴向 切 径向和轴向 _D 的参数 为标准值。 法平面 轴面 端 中间平面 BC 。 圆环面蜗杆传动 圆柱面蜗 杆传动 阿基米德蜗杆传动 锥蜗杆传 动 (36)蜗杆传动与齿轮传动相比较,其主要特点有 BC 。 传动比大,传动平稳 可实现自 锁 发热量大 传递功率 大 _ 公式 计算是正确的。 i =Wi/W2 i =Z2/Z1 i=d2.di i (38)常用蜗杆传动的传动比的范围通常为 。 ii2 ■ 1 B ii2 =1~8 C ii2 =8~80 。 q=d「m q』 q = ¥ m d1 蜗杆。 单头,小升角 单头,大升 角 多头,小升角 多头,大升 角 (41)在其他条件相同情况下,若增加蜗杆头数 z,则 。 增加 保持不变 减小 可能增加,也可能减小 。 蜗杆的圆周速度 蜗轮的 圆周速度 (v2 +v2/2 (vi—蜗杆的圆周速度,v2 —蜗轮的圆 周速度) (43)以下几种蜗杆传动中,传动效率最高的是 。 m = 6mm,乙=2,v=2 50 , q=9 m = 6mm,乙=2 , 2 50 ,q =11 m =6mm 严=1,®v=2”50", q=9 m = 6mm, 1,v = 2 50 , q = 11 i和 :ai;蜗轮螺旋角「端面模数和压力角分别为mt2和:t2。若 蜗杆和蜗轮正确啮合,则以下条件中, ABCD 成 立。 = 旋向相同 mai = mt2 (45)一对变位的蜗杆传动,若其变位系数为 x 0, 。 蜗轮的节圆直径大于其分度圆直径 其压力角和啮合角相等 和标准传动相比,蜗杆的齿顶高增大,齿根高 减小 蜗杆传动的节圆柱直径大于分度圆柱直径 ti、Fai、Fri与蜗 t2、Fa2、Fr2关系为 D 。 Fti讥,Fai=Fa2 ,入十边,并且方向相反 Fti 二 Ft2 , Fai 二 Fa2 , F” 二 F「2,并且方向相同 Fti = Ft2 , Fai = Ft2 , Fri =巳,并且方向相反 Fti 二 Fa2 , Fai 二 Ft2 , Fri =Fr2,并且方向相反 (47)采用蜗杆变位传动时, B 仅对蜗杆进行变位 仅对 蜗轮进行变位 同时对蜗杆、蜗轮进行变位 (48)对于普通圆柱蜗杆传动,下列说法错误的 。 传动比不等于蜗轮与蜗杆分度圆直径比 蜗杆直径系数q越小,则蜗杆刚度越大 在蜗杆端面内模数和压力角为标准值 蜗轮头数z多时,传动效率提高 二填空题 (1)在蜗杆传动中,产生自锁的条件是 螺旋线升 (导程)角小于啮合面的当量磨擦角 或,壮+(1-2。)或 丫八。 O (2)对闭式蜗杆传动,通常是按一蜗轮齿面接触疲劳 强度进行设计,而按 蜗轮齿根弯曲疲劳 强度进行校 核;对于开式蜗杆传动,则通常只需按 蜗轮齿根弯曲 疲劳强度进行设计。 (3)在闭式蜗杆传动中,只需对 —蜗轮—进行―齿面 点蚀(替代胶合)和齿根弯曲疲劳 强度计算。 (4)蜗杆传动的承载能力计算包括以下几个方面: 蜗轮齿根弯曲疲劳强度 、蜗轮齿面接触疲劳强度 蜗杆刚度。 (5)蜗杆传动中,蜗杆的头数根据 要求的传动比 和 传动效率 选定:蜗轮的齿数主要是根据 传动比 确定。 (6)蜗杆传动中,作用在蜗杆上的 3个分力中最大 的是 轴向力 。 (7)蜗杆传动变位的目的主要是为了 配凑中心 距 、 提高承载能力 、 提高传动效率 。 _以蜗杆齿根 圆直径为直径的轴 进行强度 和刚度的校 核。 ZCuAII0Fe3作蜗轮轮缘材料时, 其许用接触应力X 1与相对滑动速度Vs有关,而与_接 触疲劳次数 无关。 Z2 o (11)在蜗杆传动中,由于 材料和结构 的原因, 蜗杆螺旋部分的强度总是高于蜗轮轮齿的强度, 所以失效常发生在蜗轮轮齿上。 (12)普通圆柱蜗杆传动的标准模数m和标准压力角 :在 中间平 面上,在该平面内,蜗杆传动相当于丄 条与齿轮 啮合传动。 ^点 _、 —。但因蜗杆传动在齿 面间有较大的相对滑动速度,所以更容易产生胶合和 磨损失效。 (14)在蜗杆传动中,蜗轮的螺旋线方向应与蜗杆螺 旋线方向相同 。 (15)规定蜗杆直径系数q(或分度圆直径di )的标准, 是为了 减少蜗轮滚刀的数目,以利于刀具的标准
钢调质 D. ZCuSnIOPbl
(9)在蜗杆传动中,轮齿承载能力计算,主要是针
对 D 来进行的。
A. 蜗杆齿面接触强度和蜗轮齿根弯曲强度B. 蜗轮齿面接触强度和蜗杆齿根弯曲强度
C. 蜗杆齿面接触强度和蜗杆齿根弯曲强度⏺
D. 蜗轮齿面接触强度和蜗轮齿根弯曲强度
E. 。
F. 防止润滑油受热后外溢,造成环境污染
G. 防止润滑油温度过高使润滑条件恶化
防止蜗轮材料在高温下力学性能下降
防止蜗轮蜗杆发生热变形后正确啮合受到 破坏
向是正确的。
(Q (D)
图 11-1
ti、轴向力Fai分别与蜗轮所
_ 、 A 大小相等,方向相反。
圆周力Ft2
轴向力Fa2
r2
不是蜗杆传动的优
点。
传动平稳,噪声小
传
动比可以很大
可以自锁
传动效率高
。
1、2、4、6
2~5
3~6
4~8
。
蜗杆主动,蜗轮从动
蜗
轮主动,蜗杆从动
蜗杆或蜗轮主动
增速传动
。
保证蜗杆有足够的刚度
提高蜗杆传动的效率
利于蜗轮滚刀的标准化
便于蜗杆刀具的标准化
。
不变
改变
不一定改变
是否改变由设计者确定
(18)蜗轮轮缘与轮毂采用不同材料的目的是为了
。
加工方便
提高精度
节约有色金属
减轻重量
I轴的转向,欲提升重物 W,
。
右、右
右、左
左、右
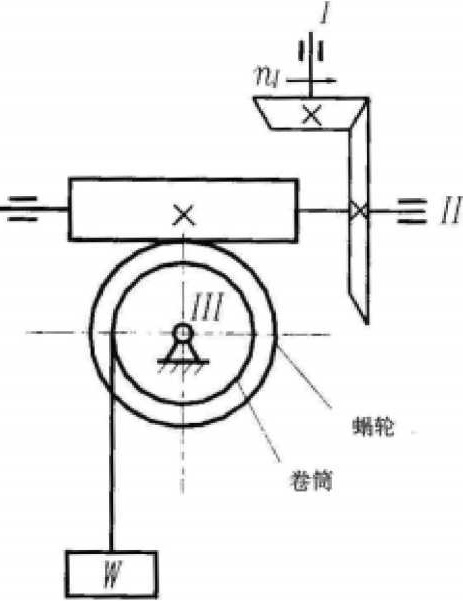
图 11-2
_B 。
钢和铸铁
钢和青铜
钢和铝合金
钢和钢
(21)在蜗杆传动的强度计算中,若蜗轮的材料选用
有
关。
蜗轮的铸造方法
蜗杆与蜗轮齿面间的相对滑动速度
应力循环次数
蜗轮受双向载荷还是单向载荷
(22)蜗杆减速器采用风扇冷却时,风扇应装在
—。
蜗杆轴上
蜗轮轴上
较高的(上面的)轴上
较低的(下面的)轴上
(23)蜗杆传动中,蜗轮的轮缘通常采用青铜,蜗杆
_。
强度高
减摩耐磨性好
加
价格便宜
HT20O的开式蜗杆传动,其主要
。
齿面点蚀
齿面磨损
齿
蜗轮轮齿折断
(25)在其他条件相同时,若增加蜗杆头数,则齿面
。
增加
保持不变
减
可能增加或减小
。
增加蜗轮齿数Z2
Zi
减小模数m
增大蜗杆直径系数q
公式计算。
d^mq
・ d^mzi
^mq B・ d^mzi C・ di 匹
nh
d1 =2a -d2
(28)蜗杆传动热平衡计算的目的是为了控制温升,
_ 。
蜗杆力学性能下降
润滑油变质和胶合
传动效率下降
蜗轮材料退火
。
增大蜗杆的分度圆直径 di
采用高强度合金钢制造蜗杆
提高蜗杆硬度和降低表面粗糙度
增加蜗杆头数
⏺
当量摩擦角
大于
等于
小于或等于
(31)蜗杆传动在单位时间内的发热量, 来进行计算的。
传递的功率p与传动效率
杆的转速ni与传动效率
传动比i和传动效率
Vs
^ 40,转速n^50r/min, 则蜗杆传动啮合节点的相对滑动速度vs等干 D m/s o
6.63
_力的影响。
径向
轴向
切
径向和轴向
_D 的参数
为标准值。
法平面
轴面
端
中间平面
BC 。
圆环面蜗杆传动
圆柱面蜗
杆传动
阿基米德蜗杆传动
锥蜗杆传
动
(36)蜗杆传动与齿轮传动相比较,其主要特点有
BC 。
传动比大,传动平稳
可实现自
锁
发热量大
传递功率
大
_ 公式 计算是正确的。
i =Wi/W2
i =Z2/Z1
i=d2.di
i
(38)常用蜗杆传动的传动比的范围通常为
。
ii2 ■ 1 B ii2 =1~8 C ii2 =8~80
。
q=d「m
q』
q = ¥
m d1
蜗杆。
单头,小升角
单头,大升
角
多头,小升角
多头,大升
角
(41)在其他条件相同情况下,若增加蜗杆头数 z,则
。
增加
保持不变
减小
可能增加,也可能减小
。
蜗杆的圆周速度
蜗轮的
圆周速度
(v2 +v2/2 (vi—蜗杆的圆周速度,v2 —蜗轮的圆 周速度)
(43)以下几种蜗杆传动中,传动效率最高的是
。
m = 6mm,乙=2,v=2 50 , q=9
m = 6mm,乙=2 , 2 50 ,q =11
m =6mm 严=1,®v=2”50", q=9
m = 6mm, 1,v = 2 50 , q = 11
i和 :ai;蜗轮螺旋角「端面模数和压力角分别为mt2和:t2。若 蜗杆和蜗轮正确啮合,则以下条件中, ABCD 成
立。
=
旋向相同
mai = mt2
(45)一对变位的蜗杆传动,若其变位系数为 x 0,
。
蜗轮的节圆直径大于其分度圆直径
其压力角和啮合角相等
和标准传动相比,蜗杆的齿顶高增大,齿根高 减小
蜗杆传动的节圆柱直径大于分度圆柱直径
ti、Fai、Fri与蜗
t2、Fa2、Fr2关系为 D 。
Fti讥,Fai=Fa2 ,入十边,并且方向相反
Fti 二 Ft2 , Fai 二 Fa2 , F” 二 F「2,并且方向相同
Fti = Ft2 , Fai = Ft2 , Fri =巳,并且方向相反
Fti 二 Fa2 , Fai 二 Ft2 , Fri =Fr2,并且方向相反 (47)采用蜗杆变位传动时, B
仅对蜗杆进行变位
仅对
蜗轮进行变位
同时对蜗杆、蜗轮进行变位
(48)对于普通圆柱蜗杆传动,下列说法错误的
。
传动比不等于蜗轮与蜗杆分度圆直径比
蜗杆直径系数q越小,则蜗杆刚度越大
在蜗杆端面内模数和压力角为标准值
蜗轮头数z多时,传动效率提高
二填空题
(1)在蜗杆传动中,产生自锁的条件是 螺旋线升
(导程)角小于啮合面的当量磨擦角 或,壮+(1-2。)或 丫八。
O
(2)对闭式蜗杆传动,通常是按一蜗轮齿面接触疲劳 强度进行设计,而按 蜗轮齿根弯曲疲劳 强度进行校 核;对于开式蜗杆传动,则通常只需按 蜗轮齿根弯曲 疲劳强度进行设计。
(3)在闭式蜗杆传动中,只需对 —蜗轮—进行―齿面 点蚀(替代胶合)和齿根弯曲疲劳 强度计算。
(4)蜗杆传动的承载能力计算包括以下几个方面: 蜗轮齿根弯曲疲劳强度 、蜗轮齿面接触疲劳强度 蜗杆刚度。
(5)蜗杆传动中,蜗杆的头数根据 要求的传动比 和 传动效率 选定:蜗轮的齿数主要是根据 传动比 确定。
(6)蜗杆传动中,作用在蜗杆上的 3个分力中最大
的是 轴向力 。
(7)蜗杆传动变位的目的主要是为了 配凑中心
距 、 提高承载能力 、 提高传动效率 。
_以蜗杆齿根 圆直径为直径的轴 进行强度 和刚度的校
核。
ZCuAII0Fe3作蜗轮轮缘材料时, 其许用接触应力X 1与相对滑动速度Vs有关,而与_接 触疲劳次数 无关。
Z2 o
(11)在蜗杆传动中,由于 材料和结构 的原因, 蜗杆螺旋部分的强度总是高于蜗轮轮齿的强度, 所以失效常发生在蜗轮轮齿上。
(12)普通圆柱蜗杆传动的标准模数m和标准压力角 :在 中间平 面上,在该平面内,蜗杆传动相当于丄 条与齿轮 啮合传动。
^点
_、 —。但因蜗杆传动在齿 面间有较大的相对滑动速度,所以更容易产生胶合和 磨损失效。
(14)在蜗杆传动中,蜗轮的螺旋线方向应与蜗杆螺 旋线方向相同 。
(15)规定蜗杆直径系数q(或分度圆直径di )的标准,
是为了 减少蜗轮滚刀的数目,以利于刀具的标准
题目解答
答案
= = = . ■ / 壮 丫 八