裂纹体断裂的主要原因:载荷的大小及其使物体形成的应力;裂纹的大小及裂纹的长短或深浅。1)________2)传动系统的作用:1传递动力;2实现预期的运动.3)传动形式选择的基本原则主要有:1小功率传动应在满足工作性能的前期下选用结构简单的传动装置,尽可能降低制造成本; 2大管理层传动应优先考虑传动的效率,节约能源,降低运转个维修费用; 3当机构要求变速时,若能与电动机调速比[1]相适应,可采用定传动比传动装置;当要求变速范围大,用电动机调速不能满足要求时,应采用变速比传动; 4当载荷变化频繁,且可能出现过载时,应考虑增加过载保护装置; 5传动装置的选用必须与制造技术水平相适应,应尽可能选用专业厂生产的通用传动部件或元件4)传动系统的分类:;Ⅰ按传动比或输出速度是否有变化分㈠固定传动比的系统[2](定比传动系统).㈡可调传动比的传动系统:1有级变速传动, 2无级变速传动(机械无级变速,电力无级变速,液压无级调速,气压无级调速).;Ⅱ按原动机驱动执行机构[3]的数目分㈠独立驱动的传动系统(只有一个执行机构,有运动不相关的多个执行机构,数字控制的自动机械);㈡集中驱动的传动系统(执行机构之间有一定的传动比要求,执行机构之间有动作的顺序要求,各执行机构的运动相互独立)㈢联合驱动的传动系统(有多个原动机经传动链联合驱动)5)执行构件的运动形式:回转[4]运动(连续回转运动、间歇回转运动)、直线运动6)每一个运动必须有一条外联传动链;只有复合运动才有内联传动链;内联传动链决定对工件的加工质[5]量,所以不能用传动比不准确的传动副和摩擦副、液压传动等7)设计外传动链主要考虑保证要求的转速或速度以及传递的功率;设计内传动链主要考虑保证传动精度8)外传动链功能:把动力从原动机传递给执行机构;保证执行机构的转速或速度和一定的条速范围;能够方便地进行运动的启动[6]、停止、换向、制动。内传动链功能:进行运动和动力的传递,并实现运动形式的改变;保证运动与运动之间严格的速比,完成运动之间的协调配合。9)定比传动机构的作用:将原动机输出的转速降低(或提高),并将其转矩提高(或降低)10)自动机械对其定比传动机构的要求是:传递足够的功率和扭矩,并具有较高的传动效率;体积小,重量轻;噪声在允许的范围内;结构简单,制造`装配和维修的工艺性好;润滑和密封良好,防止出现”三漏”(漏水`漏气`漏油)现象.在传动比分配上采用前小后大原则11)运动曲线:双停留曲线,单停留曲线,无停留曲线。12)当传动要求尺寸紧凑时——齿轮传动;主、从动轴平行时——带、链、圆柱齿轮传动;主、从动轴间距大——带、链传动;主、从动轴在同一轴线——二级、多级齿轮传动、行星齿轮传动;主从动轴相交——圆锥齿轮、圆锥摩擦轮传动;两轴交错——蜗杆涡轮、螺旋齿轮传动13)无级变速装置应用场合:①工艺参数多变的机器②要求转速连续变化的机器③探求机器最佳的工作速度④协调几台机器或一台机器的传动系统中几个运转单元之间的运转速度⑤缓速启动和便于越过共振区.14)。-|||-半-|||-三-|||-一机器零件`构件的原始误差:能够引起机构误差的机器零件`构件在制造和装配方面的各种误差均称为机构的原始误差.其主要有:1尺寸误差(eg构件长度尺寸`中心距及角度)` 2形状误差(eg轮廓形状误差), 3偏心距误差, 4运动副轴线的偏斜, 5运动副的间隙.15)运动曲线具有下列性质:1位移是时间的单值函数, 2位移是时间的连续函数,可以微分; 3由于时间不可逆,所以过去的状态会影响到未来,而未来的状态对过去没有影响.16)广义的运动曲线,不仅指位移和时间关系曲线,还包括速度`加速度`跃度等运动量随时间的变化曲线.对于性能优良的运动曲线,其位移`速度`加速度有应连续.17)运动曲线的选用原则:1低速机构应选Vm较小的曲线,Jm值允许较大. 2高速重载情况.应选Vm与(AV)m较小的曲线,以改善受力条件. 3中速轻载情况,应选用Am与Jm较小的曲线,以减小振动,保证从动件运转时的工作精度. 4高速轻载机构,一般应考虑Jm较小的曲线. 5结构固有频率较低的凸轮机构,选用曲线时要使最高阶谐波频率低于固有频率. (最大速度Vm;最大跃度Jm;动载转矩特性值(AV)m;最大家速度Am)18)常用间歇运动机构有:1棘轮机构; 2槽轮机构; 3分度凸轮机构; 4不完全齿轮机构; 5星轮机构; 6曲柄导杆机构.19)。-|||-半-|||-三-|||-一设计间歇运动机构时,应满足的要求: 1停歇位置准确可靠:主要通过一定形式的定位机构来保证. 2换位迅速平稳:生产中的换位一般是菜空行程的辅助操作时间内进行.换位迅速有利于提高生产效率.换位平稳是要尽量减小从动件运动开始和终了时的加速度.降低惯性冲击个噪声.换位平稳是换位迅速的必要条件. 3调节性能好:方便调节,以适应不同的工艺要求. 4定位精度能够长期保持,结构简单紧凑,制造工艺性好. ..20)。-|||-半-|||-三-|||-一棘轮机构由棘轮`棘爪`机架等组成.主动杆1空套在与棘轮3固定在一起的从动轴上,驱动棘爪2与主动杆的转动副相连,并通过弹簧5的张力使驱动棘爪2压向棘轮3当杆1逆时针方向摆动时,驱动棘爪2插入棘轮齿槽,推动棘轮转过一个角度.当杆1顺时针方向摆动时,棘爪被拉出棘轮齿槽,棘轮处于静止状态,从而实现棘轮3作单向的间隙转动/.杆1的往复摆动可以利用杆机构`凸轮机构等来驱动.21)棘轮机构主要用于将周期性的往复运动转换为棘轮的单向间歇转动,也常用于防逆转装置.22)棘轮机构的特点是结构简单`制作容易,便于实现调节,但精度低,工作室噪声和冲击大,磨损快.so,多用于运动速度和精度不高,传递动力不大的分度`计数`供料和制动等场合.23)棘轮机构的种类:1齿式棘轮机构2摩擦棘轮机构(eg超越离合器) 3特殊棘轮机构24)棘轮回转角一般不超过45°,最大不超过90°~100°.其调节方法有:1改变摆杆摆动角度2改变棘爪每次推过的齿数(eg用遮板遮住齿)25)。-|||-半-|||-三-|||-一。-|||-半-|||-三-|||-一槽轮机构工作原理:平面外槽轮机构,拨销盘上的转臂4以匀角速度w转动.当转臂上的拨销3进入槽轮1的径向槽中时,转臂通过拨销驱动槽轮以角速度w转动.当拨销转过2∮角度后,拨销脱开槽轮,转臂继续转动而槽轮不动,直到拨销进入下一个槽内,又重复以上循环.这样就把转臂的连续回转运动转换成槽轮的单向步进回转运动.在槽轮不动的时间内,靠拨销盘上锁紧弧5和槽轮上定位弧2的配合实现槽轮的定位锁紧.26)槽轮机构的特点及应用:1结构简单`紧凑,工作可靠; 2转位迅速,效率高;能平稳地改变从动件的角速度; 4槽轮机构运动规律不能选择,调节性能差,在拨销进入和脱出槽轮时会产生有限的二次冲击; 5当精度要求较高时需另加定位装置,制造`装配精度要求较高.常用与低`中速工位不太多(4~8,很少超过12)的转位``分度等步进传动中.eg包装机械`陶瓷机械`玻璃制品机械等.27)合理设计槽轮机构及其负载部件的原则:1应尽量减少负载部件的重量,如工作台采用轻质材料或进行合理设计; 2应设法减少负载部件的回转半径,有时单个大径(多工位)工作台不如多个小径(少工位)工作台更经济; 3设计时应注意槽轮槽数不宜太少(即尽量加大拨销盘的工作转角),转速不宜太高.28)改善槽轮机构运动特性方法: 1增加槽数和增速传动,使运动平衡可靠(①增加槽轮的槽数,②增加增速机构eg槽轮转45°工作部件转90°); 2改变主动拨销的角速度; 3改变主动拨销的回转半径
裂纹体断裂的主要原因:载荷的大小及其使物体形成的应力;裂纹的大小及裂纹的长短或深浅。
1)________
2)传动系统的作用:1传递动力;2实现预期的运动.
3)传动形式选择的基本原则主要有:1小功率传动应在满足工作性能的前期下选用结构简单的传动装置,尽可能降低制造成本; 2大管理层传动应优先考虑传动的效率,节约能源,降低运转个维修费用; 3当机构要求变速时,若能与电动机调速比[1]相适应,可采用定传动比传动装置;当要求变速范围大,用电动机调速不能满足要求时,应采用变速比传动; 4当载荷变化频繁,且可能出现过载时,应考虑增加过载保护装置; 5传动装置的选用必须与制造技术水平相适应,应尽可能选用专业厂生产的通用传动部件或元件
4)传动系统的分类:;Ⅰ按传动比或输出速度是否有变化分㈠固定传动比的系统[2](定比传动系统).㈡可调传动比的传动系统:1有级变速传动, 2无级变速传动(机械无级变速,电力无级变速,液压无级调速,气压无级调速).;Ⅱ按原动机驱动执行机构[3]的数目分㈠独立驱动的传动系统(只有一个执行机构,有运动不相关的多个执行机构,数字控制的自动机械);㈡集中驱动的传动系统(执行机构之间有一定的传动比要求,执行机构之间有动作的顺序要求,各执行机构的运动相互独立)㈢联合驱动的传动系统(有多个原动机经传动链联合驱动)
5)执行构件的运动形式:回转[4]运动(连续回转运动、间歇回转运动)、直线运动
6)每一个运动必须有一条外联传动链;只有复合运动才有内联传动链;内联传动链决定对工件的加工质[5]量,所以不能用传动比不准确的传动副和摩擦副、液压传动等
7)设计外传动链主要考虑保证要求的转速或速度以及传递的功率;设计内传动链主要考虑保证传动精度
8)外传动链功能:把动力从原动机传递给执行机构;保证执行机构的转速或速度和一定的条速范围;能够方便地进行运动的启动[6]、停止、换向、制动。内传动链功能:进行运动和动力的传递,并实现运动形式的改变;保证运动与运动之间严格的速比,完成运动之间的协调配合。
9)定比传动机构的作用:将原动机输出的转速降低(或提高),并将其转矩提高(或降低)
10)自动机械对其定比传动机构的要求是:传递足够的功率和扭矩,并具有较高的传动效率;体积小,重量轻;噪声在允许的范围内;结构简单,制造`装配和维修的工艺性好;润滑和密封良好,防止出现”三漏”(漏水`漏气`漏油)现象.在传动比分配上采用前小后大原则
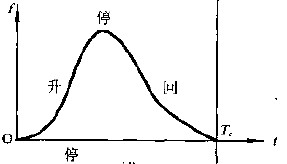
11)运动曲线:双停留曲线,单停留曲线,无停留曲线。
12)当传动要求尺寸紧凑时——齿轮传动;主、从动轴平行时——带、链、圆柱齿轮传动;主、从动轴间距大——带、链传动;主、从动轴在同一轴线——二级、多级齿轮传动、行星齿轮传动;主从动轴相交——圆锥齿轮、圆锥摩擦轮传动;两轴交错——蜗杆涡轮、螺旋齿轮传动
13)无级变速装置应用场合:①工艺参数多变的机器②要求转速连续变化的机器③探求机器最佳的工作速度④协调几台机器或一台机器的传动系统中几个运转单元之间的运转速度⑤缓速启动和便于越过共振区.
14) 机器零件`构件的原始误差:能够引起机构误差的机器零件`构件在制造和装配方面的各种误差均称为机构的原始误差.其主要有:1尺寸误差(eg构件长度尺寸`中心距及角度)` 2形状误差(eg轮廓形状误差), 3偏心距误差, 4运动副轴线的偏斜, 5运动副的间隙.
机器零件`构件的原始误差:能够引起机构误差的机器零件`构件在制造和装配方面的各种误差均称为机构的原始误差.其主要有:1尺寸误差(eg构件长度尺寸`中心距及角度)` 2形状误差(eg轮廓形状误差), 3偏心距误差, 4运动副轴线的偏斜, 5运动副的间隙.
15)运动曲线具有下列性质:1位移是时间的单值函数, 2位移是时间的连续函数,可以微分; 3由于时间不可逆,所以过去的状态会影响到未来,而未来的状态对过去没有影响.
16)广义的运动曲线,不仅指位移和时间关系曲线,还包括速度`加速度`跃度等运动量随时间的变化曲线.对于性能优良的运动曲线,其位移`速度`加速度有应连续.
17)运动曲线的选用原则:1低速机构应选Vm较小的曲线,Jm值允许较大. 2高速重载情况.应选Vm与(AV)m较小的曲线,以改善受力条件. 3中速轻载情况,应选用Am与Jm较小的曲线,以减小振动,保证从动件运转时的工作精度. 4高速轻载机构,一般应考虑Jm较小的曲线. 5结构固有频率较低的凸轮机构,选用曲线时要使最高阶谐波频率低于固有频率. (最大速度Vm;最大跃度Jm;动载转矩特性值(AV)m;最大家速度Am)
18)常用间歇运动机构有:1棘轮机构; 2槽轮机构; 3分度凸轮机构; 4不完全齿轮机构; 5星轮机构; 6曲柄导杆机构.
19) 设计间歇运动机构时,应满足的要求: 1停歇位置准确可靠:主要通过一定形式的定位机构来保证. 2换位迅速平稳:生产中的换位一般是菜空行程的辅助操作时间内进行.换位迅速有利于提高生产效率.换位平稳是要尽量减小从动件运动开始和终了时的加速度.降低惯性冲击个噪声.换位平稳是换位迅速的必要条件. 3调节性能好:方便调节,以适应不同的工艺要求. 4定位精度能够长期保持,结构简单紧凑,制造工艺性好. ..
设计间歇运动机构时,应满足的要求: 1停歇位置准确可靠:主要通过一定形式的定位机构来保证. 2换位迅速平稳:生产中的换位一般是菜空行程的辅助操作时间内进行.换位迅速有利于提高生产效率.换位平稳是要尽量减小从动件运动开始和终了时的加速度.降低惯性冲击个噪声.换位平稳是换位迅速的必要条件. 3调节性能好:方便调节,以适应不同的工艺要求. 4定位精度能够长期保持,结构简单紧凑,制造工艺性好. ..
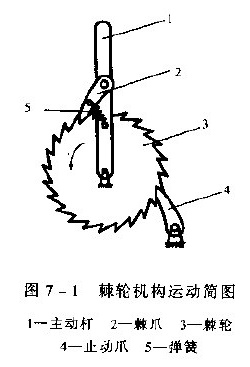
20) 棘轮机构由棘轮`棘爪`机架等组成.主动杆1空套在与棘轮3固定在一起的从动轴上,驱动棘爪2与主动杆的转动副相连,并通过弹簧5的张力使驱动棘爪2压向棘轮3当杆1逆时针方向摆动时,驱动棘爪2插入棘轮齿槽,推动棘轮转过一个角度.当杆1顺时针方向摆动时,棘爪被拉出棘轮齿槽,棘轮处于静止状态,从而实现棘轮3作单向的间隙转动/.杆1的往复摆动可以利用杆机构`凸轮机构等来驱动.
棘轮机构由棘轮`棘爪`机架等组成.主动杆1空套在与棘轮3固定在一起的从动轴上,驱动棘爪2与主动杆的转动副相连,并通过弹簧5的张力使驱动棘爪2压向棘轮3当杆1逆时针方向摆动时,驱动棘爪2插入棘轮齿槽,推动棘轮转过一个角度.当杆1顺时针方向摆动时,棘爪被拉出棘轮齿槽,棘轮处于静止状态,从而实现棘轮3作单向的间隙转动/.杆1的往复摆动可以利用杆机构`凸轮机构等来驱动.
21)棘轮机构主要用于将周期性的往复运动转换为棘轮的单向间歇转动,也常用于防逆转装置.
22)棘轮机构的特点是结构简单`制作容易,便于实现调节,但精度低,工作室噪声和冲击大,磨损快.so,多用于运动速度和精度不高,传递动力不大的分度`计数`供料和制动等场合.
23)棘轮机构的种类:1齿式棘轮机构2摩擦棘轮机构(eg超越离合器) 3特殊棘轮机构
24)棘轮回转角一般不超过45°,最大不超过90°~100°.其调节方法有:1改变摆杆摆动角度2改变棘爪每次推过的齿数(eg用遮板遮住齿)
25)
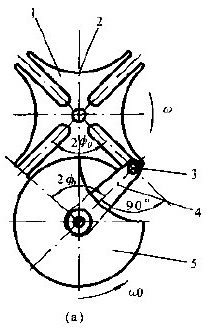
 槽轮机构工作原理:平面外槽轮机构,拨销盘上的转臂4以匀角速度w转动.当转臂上的拨销3进入槽轮1的径向槽中时,转臂通过拨销驱动槽轮以角速度w转动.当拨销转过2∮角度后,拨销脱开槽轮,转臂继续转动而槽轮不动,直到拨销进入下一个槽内,又重复以上循环.这样就把转臂的连续回转运动转换成槽轮的单向步进回转运动.在槽轮不动的时间内,靠拨销盘上锁紧弧5和槽轮上定位弧2的配合实现槽轮的定位锁紧.
槽轮机构工作原理:平面外槽轮机构,拨销盘上的转臂4以匀角速度w转动.当转臂上的拨销3进入槽轮1的径向槽中时,转臂通过拨销驱动槽轮以角速度w转动.当拨销转过2∮角度后,拨销脱开槽轮,转臂继续转动而槽轮不动,直到拨销进入下一个槽内,又重复以上循环.这样就把转臂的连续回转运动转换成槽轮的单向步进回转运动.在槽轮不动的时间内,靠拨销盘上锁紧弧5和槽轮上定位弧2的配合实现槽轮的定位锁紧.
26)槽轮机构的特点及应用:1结构简单`紧凑,工作可靠; 2转位迅速,效率高;能平稳地改变从动件的角速度; 4槽轮机构运动规律不能选择,调节性能差,在拨销进入和脱出槽轮时会产生有限的二次冲击; 5当精度要求较高时需另加定位装置,制造`装配精度要求较高.常用与低`中速工位不太多(4~8,很少超过12)的转位``分度等步进传动中.eg包装机械`陶瓷机械`玻璃制品机械等.
27)合理设计槽轮机构及其负载部件的原则:1应尽量减少负载部件的重量,如工作台采用轻质材料或进行合理设计; 2应设法减少负载部件的回转半径,有时单个大径(多工位)工作台不如多个小径(少工位)工作台更经济; 3设计时应注意槽轮槽数不宜太少(即尽量加大拨销盘的工作转角),转速不宜太高.
28)改善槽轮机构运动特性方法: 1增加槽数和增速传动,使运动平衡可靠(①增加槽轮的槽数,②增加增速机构eg槽轮转45°工作部件转90°); 2改变主动拨销的角速度; 3改变主动拨销的回转半径
题目解答
答案
一方面,传动系统要把原动机输出的功率和扭矩传递到执行机构,使之克服生产阻力而做工;另一方面,传动系统要实现减速、变速、运动形式的改变,使执行机构能完成预定的运动。因此,传递动力和实现预期的运动是传动系统的两个基本任务。