题目
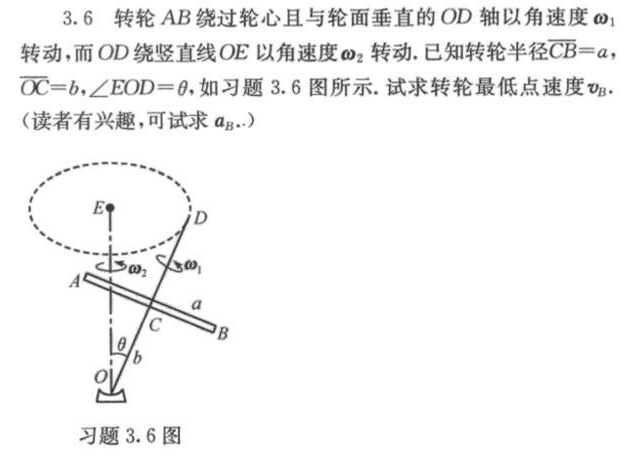
3.6 转轮AB绕过轮心且与轮面垂直的OD轴以角速度w1-|||-转动,而OD绕竖直线OE以角速度w2转动.已知转轮半径 overline (CB)=a,-|||-overrightarrow (OC)=b, angle EOD=theta , 如习题3.6图所示.试求转轮最低点速度UB·-|||-(读者有兴趣,可试求aB··)-|||-E D-|||-A-|||-002 501-|||-a-|||-C B-|||-θ,-|||-b-|||-习题3.6图
题目解答
答案

解析
步骤 1:确定坐标系
建立坐标系Oxyz,其中Ox沿CB方向,Oz沿OD方向。这样可以方便地表示转轮的角速度和位置向量。
步骤 2:计算转轮的角速度
转轮AB绕过轮心且与轮面垂直的OD轴以角速度$\omega_1$转动,而OD绕竖直线OE以角速度$\omega_2$转动。因此,转轮的总角速度$\omega$为两个角速度的矢量和。根据题意,$\omega = \omega_1 + \omega_2$。由于$\omega_1$和$\omega_2$的方向不同,需要将它们分解到坐标系中。$\omega_1$的方向垂直于转轮平面,即沿Oz方向,而$\omega_2$的方向垂直于OE,即沿Ox方向。因此,$\omega = -\omega_2 \sin \theta \hat{i} + (\omega_1 + \omega_2 \sin \theta) \hat{k}$。
步骤 3:计算转轮最低点的位置向量
转轮最低点B的位置向量为$\overrightarrow{r_B} = a\hat{i} + b\hat{k}$,其中a为转轮半径,b为OC的长度。
步骤 4:计算转轮最低点的速度
转轮最低点的速度$\overrightarrow{v_B}$可以通过角速度$\omega$和位置向量$\overrightarrow{r_B}$的叉乘得到,即$\overrightarrow{v_B} = \omega \times \overrightarrow{r_B}$。将$\omega$和$\overrightarrow{r_B}$代入,得到$\overrightarrow{v_B} = [-\omega_2 \sin \theta \hat{i} + (\omega_1 + \omega_2 \sin \theta) \hat{k}] \times (a\hat{i} + b\hat{k})$。计算叉乘,得到$\overrightarrow{v_B} = [a(\omega_1 + \omega_2 \sin \theta) - b\omega_2 \sin \theta] \hat{j}$。
建立坐标系Oxyz,其中Ox沿CB方向,Oz沿OD方向。这样可以方便地表示转轮的角速度和位置向量。
步骤 2:计算转轮的角速度
转轮AB绕过轮心且与轮面垂直的OD轴以角速度$\omega_1$转动,而OD绕竖直线OE以角速度$\omega_2$转动。因此,转轮的总角速度$\omega$为两个角速度的矢量和。根据题意,$\omega = \omega_1 + \omega_2$。由于$\omega_1$和$\omega_2$的方向不同,需要将它们分解到坐标系中。$\omega_1$的方向垂直于转轮平面,即沿Oz方向,而$\omega_2$的方向垂直于OE,即沿Ox方向。因此,$\omega = -\omega_2 \sin \theta \hat{i} + (\omega_1 + \omega_2 \sin \theta) \hat{k}$。
步骤 3:计算转轮最低点的位置向量
转轮最低点B的位置向量为$\overrightarrow{r_B} = a\hat{i} + b\hat{k}$,其中a为转轮半径,b为OC的长度。
步骤 4:计算转轮最低点的速度
转轮最低点的速度$\overrightarrow{v_B}$可以通过角速度$\omega$和位置向量$\overrightarrow{r_B}$的叉乘得到,即$\overrightarrow{v_B} = \omega \times \overrightarrow{r_B}$。将$\omega$和$\overrightarrow{r_B}$代入,得到$\overrightarrow{v_B} = [-\omega_2 \sin \theta \hat{i} + (\omega_1 + \omega_2 \sin \theta) \hat{k}] \times (a\hat{i} + b\hat{k})$。计算叉乘,得到$\overrightarrow{v_B} = [a(\omega_1 + \omega_2 \sin \theta) - b\omega_2 \sin \theta] \hat{j}$。