题目
如图所示是汽车无人驾驶系统示意图.它由车载电脑、激光探测仪、雷达探测器、摄像设备等组成.摄像头会识别交通指示牌和信号灯,轮胎附近的传感器可以检测速度和方位.安装的系列传感器使得汽车可以清晰地“看到”周围物体,清楚地掌握它们的大小、距离,能判断出周围物体将可能对车辆的运动和路线造成什么影响,并作出相应的反应,进行正常行驶.请根据示意图和上述说明,完成12-13题.激光测距仪 视频摄像头-|||-车载雷达-|||-微型传感器 车载电脑-|||-标准车载雷达【小题1】以下关于该系统的说法中,不正确的是( ) A. 该系统具有检测、判断、自动驾驶等作用,体现了系统的目的性 B. 传感器的精确度会影响系统对周围环境的识别,体现了系统的相关性 C. 系统启动后先自检,调整各参数至最佳状态,再进入工作模式,体现系统的整体性 D. 该系统能够适应各种交通状况,体现了系统的环境适应性【小题2】以下对该系统的优化措施中,不正确的是( ) A. 配备备用电源,在突发情况下能正常工作 B. 增加车身强度,提高行车安全性 C. 设置驾驶模式一键切换,支持人工驾驶 D. 添加网络组件,实时定位并全程记录系统运行情况
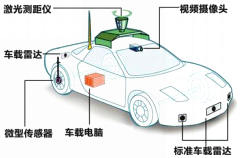
如图所示是汽车无人驾驶系统示意图.它由车载电脑、激光探测仪、雷达探测器、摄像设备等组成.摄像头会识别交通指示牌和信号灯,轮胎附近的传感器可以检测速度和方位.安装的系列传感器使得汽车可以清晰地“看到”周围物体,清楚地掌握它们的大小、距离,能判断出周围物体将可能对车辆的运动和路线造成什么影响,并作出相应的反应,进行正常行驶.请根据示意图和上述说明,完成12-13题.
【小题1】以下关于该系统的说法中,不正确的是( )
【小题2】以下对该系统的优化措施中,不正确的是( )
【小题1】以下关于该系统的说法中,不正确的是( )
- A. 该系统具有检测、判断、自动驾驶等作用,体现了系统的目的性
- B. 传感器的精确度会影响系统对周围环境的识别,体现了系统的相关性
- C. 系统启动后先自检,调整各参数至最佳状态,再进入工作模式,体现系统的整体性
- D. 该系统能够适应各种交通状况,体现了系统的环境适应性
【小题2】以下对该系统的优化措施中,不正确的是( )
- A. 配备备用电源,在突发情况下能正常工作
- B. 增加车身强度,提高行车安全性
- C. 设置驾驶模式一键切换,支持人工驾驶
- D. 添加网络组件,实时定位并全程记录系统运行情况
题目解答
答案
【小题1】ABD都正确。C错误。系统启动后先自检,调整各参数至最佳状态,再进入工作模式,体现系统的相关性。
故选:C。
【小题2】ACD都正确。B错误。增加车身长度不会提高行车安全性。
故选:B。
解析
考查要点:本题主要考查系统的基本特性(目的性、相关性、整体性、环境适应性)以及系统优化的原则。
解题核心:
- 系统特性判断:需明确各选项对应系统特性的定义,如相关性强调系统各部分相互作用,整体性强调整体功能大于部分之和。
- 优化措施合理性:需结合系统优化的目标(安全性、可靠性、经济性等)分析措施是否合理。
关键点:
- 系统相关性:系统各部分协同工作才能实现功能,如自检调整参数体现各部分关联。
- 优化误区:增加车身强度与行车安全性无直接关系,优化需针对系统功能而非无关因素。
第(1)题
选项分析:
- A:系统实现检测、判断、自动驾驶,体现目的性(正确)。
- B:传感器精度影响环境识别,体现相关性(正确)。
- C:自检调整参数后工作,体现各部分协同优化,应为相关性而非整体性(错误)。
- D:适应交通状况,体现环境适应性(正确)。
结论:选C。
第(2)题
选项分析:
- A:备用电源保障可靠性(正确)。
- B:增加车身强度与系统功能无关,无法直接提高安全性(错误)。
- C:支持人工驾驶模式切换提升用户体验(正确)。
- D:网络组件增强监控和记录能力(正确)。
结论:选B。