瞬态响应的稳定条件答:当汽车的行驶速度较低时,汽车的横摆角速度(2)`收敛,汽车是稳定的。随着汽车行驶速度的增加,且汽车为过多转向时,(2)`有可能为负值 (2)`即发散,汽车是不稳定的。第四题 应用题1.画出线性二自由度汽车模型,并列出其运动微分方程和稳态响应。(2)`运动微分方程:(2)`(2)`稳态响应:(2)` (2)`(2)`2.6450N轻型客车在试验中发现过多转向和中性转向现象,工程师们在悬架上加装横向稳定杆以提高前悬架的侧倾角刚度,结果汽车的转向特性变为不足转向。试分析其理论依据(要求有必要的公式和曲线)。答:由课本知识分析可知:汽车稳态行驶时,车厢侧倾角决定于侧倾力矩(2)`和悬架总的角刚度(2)`,即(2)`。前、后悬架作用于车厢的恢复力矩增加:(2)`,(2)`其中(2)`,(2)`分别为前、后悬架的侧倾角刚度,悬架总的角刚度(2)`为前、后悬架及横向稳定杆的侧倾角刚度之和。由以上的分析易知,当增加横向稳定杆后汽车前悬架的侧倾角刚度增大,后悬架侧倾角刚度不变,所以前悬架作用于车厢的恢复力矩增加(总侧倾力矩不变),由此汽车前轴左、右车轮载荷变化量就较大。在这种情况下,如果左右车轮轮胎的侧偏刚度在非线性区,则汽车趋于增加不足转向量。3.某种汽车的质心位置、轴距和前后轮胎的型号已定。按照二自由度操纵稳定性模型,其稳态转向特性为过多转向,试找出五种改善其特性的方法。答:①增加主销内倾角;②增大主销后倾角;③在汽车前悬架加装横向稳定杆;④使汽车前束具有在压缩行程减小,复原行程增大的特性;⑤使后悬架的侧倾转向具有趋于不足转向的特性。4.汽车空载和满载是否具有相同的操纵稳定性?答:不具有相同的操纵稳定。因为汽车空载和满载时汽车的总质量、质心位置会发生变化,这些将会影响汽车的稳定性因数、轮胎侧偏刚度、汽车侧倾刚度等操纵稳定性参数。5.试用有关公式说明汽车质心位置对主要描述和评价汽车操纵稳定性、稳态响应指标的影响。答:以静态储备系数为例说明汽车质心位置对稳态响应指标的影响:(2)`((2)`,为中性转向点至前轴的距离)当中性转向点与质心位置重合时,S.M.=0,汽车为中性转向特性;当质心在中性转向点之前时,(2)`,S.M.为正值,汽车具有不足转向特性;当质心在中性转向点之后时,(2)`,S.M.为负值,汽车具有过多转向特性。6.二自由度轿车模型的有关参数如下:总质量 m=1818.2kg绕Oz轴转动惯量 (2)`轴距 L=3.048m质心至前轴距离 a=1.463m质心至后轴距离 b=1.585m前轮总侧偏刚度 k1=-62618N/rad后轮总侧偏刚度 k2=-110185N/rad转向系总传动比 i=20试求:1)稳定性因数K、特征车速uch。2)稳态横摆角速度增益曲线(2)`、车速u=22.35m/s时的转向灵敏度(2)`。3)静态储备系数S.M.,侧向加速度为0.4g时的前、后轮侧偏角绝对值之差(2)`与转弯半径的比值R/R(R=15m)。4)车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率(2)`、阻尼比(2)`、反应时间(2)`与峰值反应时间(2)`
瞬态响应的稳定条件
答:当汽车的行驶速度较低时,汽车的横摆角速度 收敛,汽车是稳定的。随着汽车行驶速度的增加,且汽车为过多转向时,
收敛,汽车是稳定的。随着汽车行驶速度的增加,且汽车为过多转向时, 有可能为负值 即发散,汽车是不稳定的。
有可能为负值 即发散,汽车是不稳定的。
第四题 应用题
1.画出线性二自由度汽车模型,并列出其运动微分方程和稳态响应。
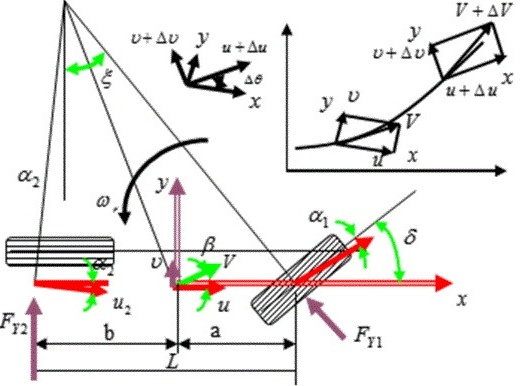
运动微分方程:

稳态响应:
2.6450N轻型客车在试验中发现过多转向和中性转向现象,工程师们在悬架上加装横向稳定杆以提高前悬架的侧倾角刚度,结果汽车的转向特性变为不足转向。试分析其理论依据(要求有必要的公式和曲线)。
答:由课本知识分析可知:汽车稳态行驶时,车厢侧倾角决定于侧倾力矩 和悬架总的角刚度
和悬架总的角刚度 ,即
,即 。
。
前、后悬架作用于车厢的恢复力矩增加:
 ,
,
其中 ,
, 分别为前、后悬架的侧倾角刚度,悬架总的角刚度为前、后悬架及横向稳定杆的侧倾角刚度之和。
分别为前、后悬架的侧倾角刚度,悬架总的角刚度为前、后悬架及横向稳定杆的侧倾角刚度之和。
由以上的分析易知,当增加横向稳定杆后汽车前悬架的侧倾角刚度增大,后悬架侧倾角刚度不变,所以前悬架作用于车厢的恢复力矩增加(总侧倾力矩不变),由此汽车前轴左、右车轮载荷变化量就较大。在这种情况下,如果左右车轮轮胎的侧偏刚度在非线性区,则汽车趋于增加不足转向量。
3.某种汽车的质心位置、轴距和前后轮胎的型号已定。按照二自由度操纵稳定性模型,其稳态转向特性为过多转向,试找出五种改善其特性的方法。
答:①增加主销内倾角;②增大主销后倾角;③在汽车前悬架加装横向稳定杆;④使汽车前束具有在压缩行程减小,复原行程增大的特性;⑤使后悬架的侧倾转向具有趋于不足转向的特性。
4.汽车空载和满载是否具有相同的操纵稳定性?
答:不具有相同的操纵稳定。因为汽车空载和满载时汽车的总质量、质心位置会发生变化,这些将会影响汽车的稳定性因数、轮胎侧偏刚度、汽车侧倾刚度等操纵稳定性参数。
5.试用有关公式说明汽车质心位置对主要描述和评价汽车操纵稳定性、稳态响应指标的影响。
答:以静态储备系数为例说明汽车质心位置对稳态响应指标的影响:
 (
( ,为中性转向点至前轴的距离)
,为中性转向点至前轴的距离)
当中性转向点与质心位置重合时,S.M.=0,汽车为中性转向特性;
当质心在中性转向点之前时, ,S.M.为正值,汽车具有不足转向特性;
,S.M.为正值,汽车具有不足转向特性;
当质心在中性转向点之后时, ,S.M.为负值,汽车具有过多转向特性。
,S.M.为负值,汽车具有过多转向特性。
6.二自由度轿车模型的有关参数如下:
总质量 m=1818.2kg
绕Oz轴转动惯量 
轴距 L=3.048m
质心至前轴距离 a=1.463m
质心至后轴距离 b=1.585m
前轮总侧偏刚度 k1=-62618N/rad
后轮总侧偏刚度 k2=-110185N/rad
转向系总传动比 i=20
试求:
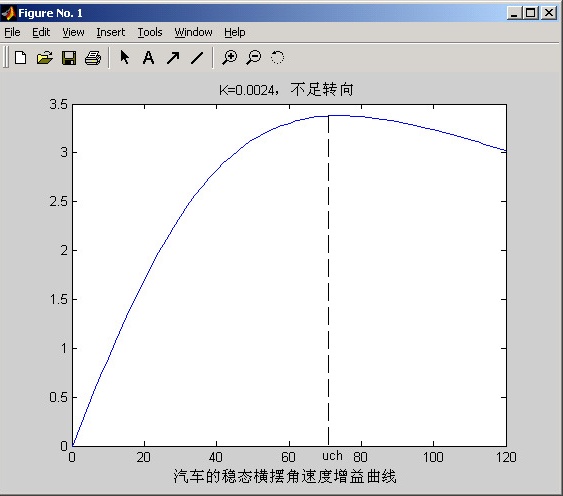
1)稳定性因数K、特征车速uch。
2)稳态横摆角速度增益曲线 、车速u=22.35m/s时的转向灵敏度
、车速u=22.35m/s时的转向灵敏度 。
。
3)静态储备系数S.M.,侧向加速度为0.4g时的前、后轮侧偏角绝对值之差 与转弯半径的比值R/R(R=15m)。
与转弯半径的比值R/R(R=15m)。
4)车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率 、阻尼比
、阻尼比 、反应时间
、反应时间 与峰值反应时间
与峰值反应时间
题目解答
答案
解:
1)稳定性因数

特征车速
2)稳态横摆角速度增益曲线如下图所示:
车速u=22.35m/s时的转向灵敏度 /20=0.168
/20=0.168
3)态储备系数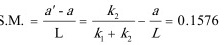 ,
,
 时前、后轮侧偏角绝对值之差
时前、后轮侧偏角绝对值之差


4)速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率 ,
,
阻尼比 ,
,
反应时间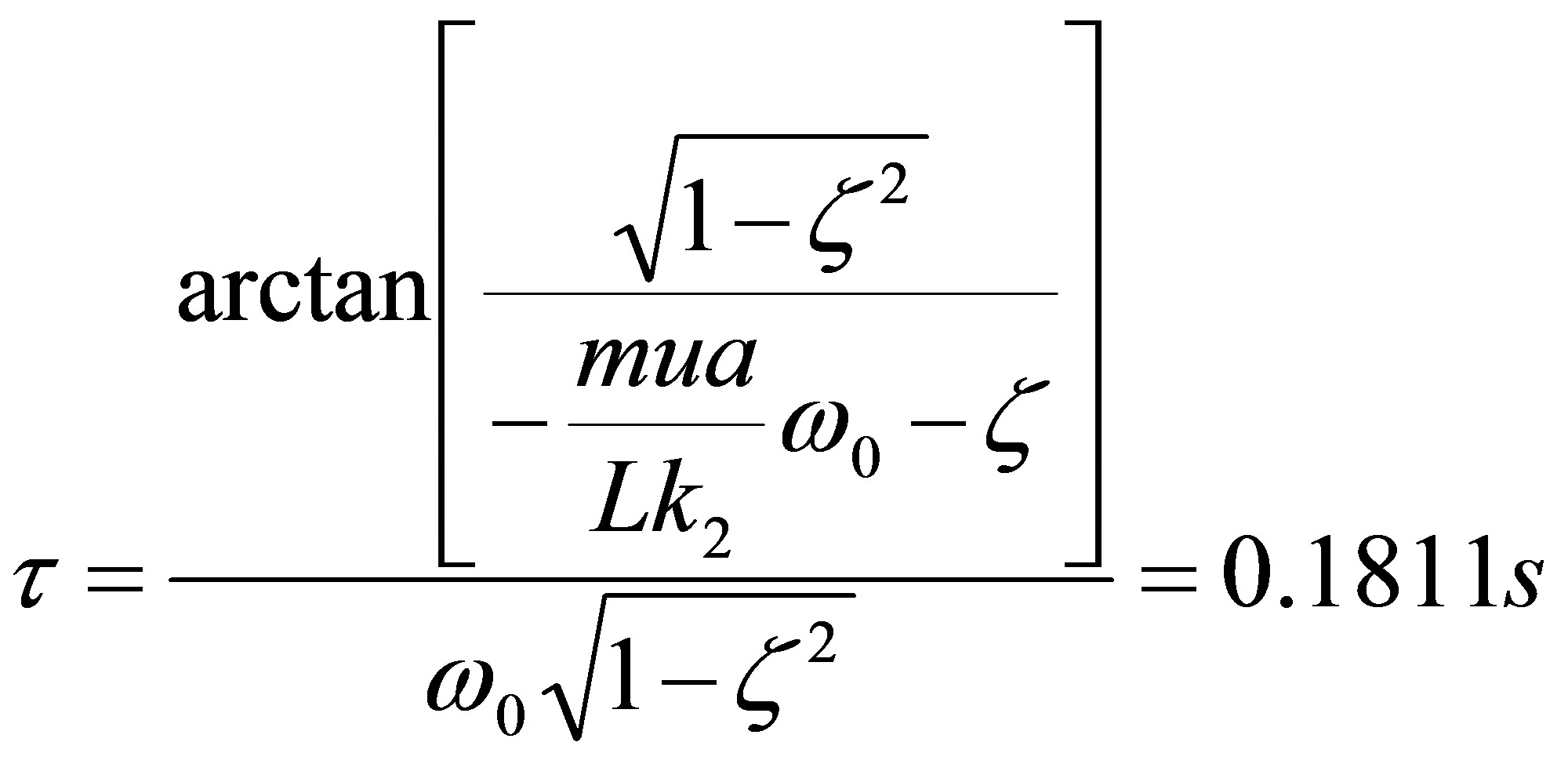
峰值反应时间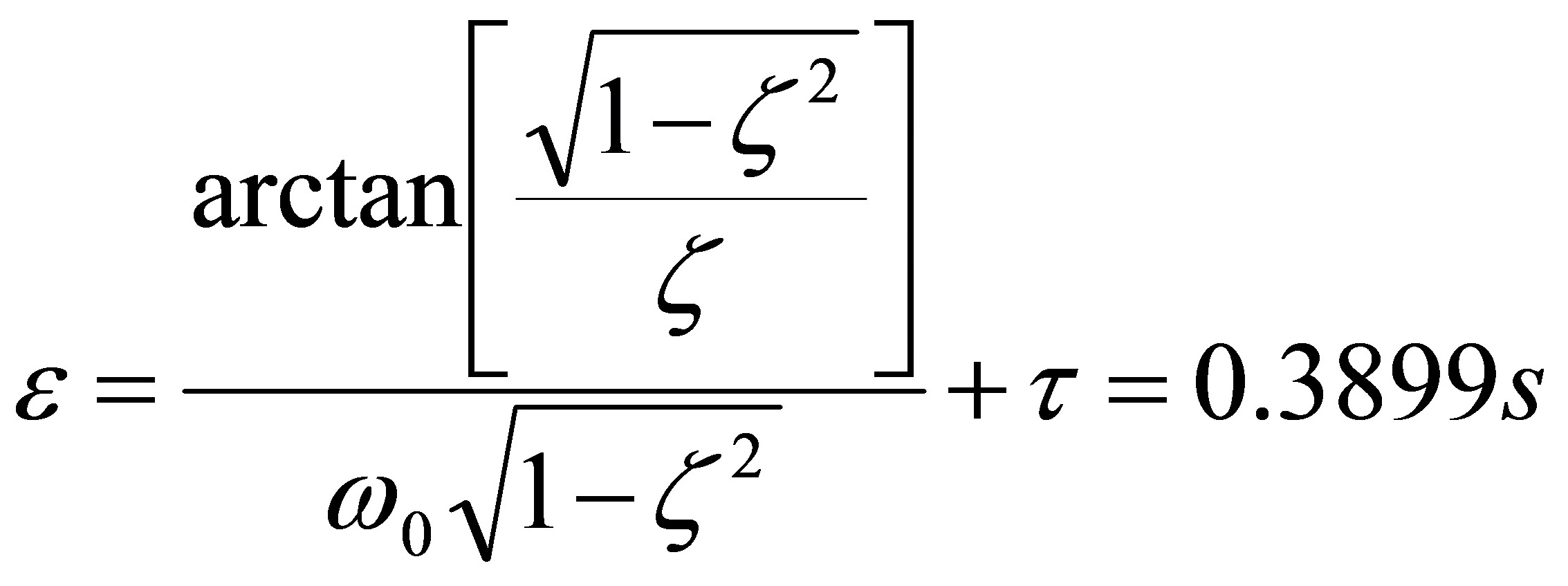
7.稳态响应中横摆角速度增益达到最大值时的车速称为特征车速 。证明:特征车速
。证明:特征车速 ,且在特征车速时的横摆角速度增益,为具有相等轴距L中性转向汽车横摆角速度增益的一半。
,且在特征车速时的横摆角速度增益,为具有相等轴距L中性转向汽车横摆角速度增益的一半。
答:特征车速指汽车稳态横摆角速度增益达到最大值时的车速,汽车稳态横摆角速度增益为:

当 ,即
,即 时等号成立,所以特征车速。此时的横摆角速度增益
时等号成立,所以特征车速。此时的横摆角速度增益 ,具有相等轴距L中性转向汽车的横摆角速度增益为u/L,前者是二者的一半。
,具有相等轴距L中性转向汽车的横摆角速度增益为u/L,前者是二者的一半。
7.测定汽车稳态转向特性常用两种方法,一为固定方向盘转角法,并以R/R-ay曲线来表示汽车的转向特性;另一为固定圆周法。试验时在场地上画一圆,驾驶员以低速沿圆周行使,记录转向盘转角 ,然后驾驶员控制转向盘使汽车始终在圆周上以低速连续加速行使。随着车速的提高,提高转向盘转角
,然后驾驶员控制转向盘使汽车始终在圆周上以低速连续加速行使。随着车速的提高,提高转向盘转角 (一般)将随之加大。记录下角,并以
(一般)将随之加大。记录下角,并以 曲线来评价汽车的转向特性。试证:
曲线来评价汽车的转向特性。试证: ,说明如何根据
,说明如何根据 曲线来判断汽车的转向特性。
曲线来判断汽车的转向特性。
证明:设转向器的总传动比为i,设低速运动时的前轮转角为 ,则
,则
 ,(其中R为圆周半径)。
,(其中R为圆周半径)。
连续急速行使时,由式(5-11): ,又
,又 ,得
,得
 。
。
所以,证毕。
中性转向时,K=0, ,是一条直线;不足转向时,K>0,
,是一条直线;不足转向时,K>0, , 将随车速得增加而逐渐增大;K<0,
, 将随车速得增加而逐渐增大;K<0, ,将随车速得增加而逐渐减小。
,将随车速得增加而逐渐减小。
8.转向盘力特性与哪些因素有关,试分析之。
答:转向盘力随汽车运动状况而变化的规律称为转向盘力特性,与下列因素有关:转向器传动比及其变化规律、转向器效率、动力转向器的转向盘操作力特性、转向杆系传动比、转向杆系效率、由悬架导向杆系决定的主销位置、轮胎上的载荷、轮胎气压、轮胎力学特性、地面附着条件、转向盘转动惯量、转向柱摩擦阻力以及汽车整体动力学特性等。
9.下图为三种前独立悬架对车轮相对车身垂直上下位移时前束变化的影响。试问图中哪一条曲线具有侧倾过多转向效果?
答:曲线1对应的前独立悬架,转弯时车厢侧倾,内侧前轮处于反弹行程,前束增加,车轮向汽车纵向中心线转动,外侧前轮处于压缩行程,前束减小,车轮向外转动。采用这种悬架导致汽车的侧倾转向增加了不足转向量,具有侧倾不足转向效果。
曲线2对应的前独立悬架,曲线较其他两种更贴近纵坐标轴,说明这种悬架的侧倾转向量很小,几乎等于零。
曲线3对应的前独立悬架,转弯时车厢侧倾,内侧前轮处于反弹行程,前束减小,车轮向汽车纵向中心线相反方向转动,外侧前轮处于压缩行程,前束增大,车轮向内转动。采用这种悬架导致汽车的侧倾转向增加了过多转向量,具有侧倾过多转向效果。