题目
3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为Ty=-19.313+295.27(1330+3527-30040-3-384295.27(n/1000)-165.44-165.44(-)(n/1000)^2+40.874^2+40.874(-)^3-(n/1000)^3-3.8445(n/1000)^4式中,Tq为发动机转矩(N•m);n为发动机转速(r/min)。发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min。装载质量 2000kg整车整备质量 1800kg总质量 3880kg车轮半径 0.367m传动系机械效率 ηt=0.85滚动阻力系数 f=0.013空气阻力系数×迎风面积 CDA=2.77m2主减速器传动比 i=5.83飞轮转动惯量 If=0.218kg•m2二前轮转动惯量 Iw1=1.798kg•m2四后轮转动惯量 Iw2=3.598kg•m2变速器传动比 ig(数据如下表)Ⅰ档Ⅱ档Ⅲ档Ⅳ档Ⅴ档四档变速器6.093.091.711.00-五档变速器5.562.7691.6441.000.793轴距 L=3.2m质心至前轴距离(满载) a=1.974m质心高(满载) hg=0.9m
3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选
其中的一种进行整车性能计算):
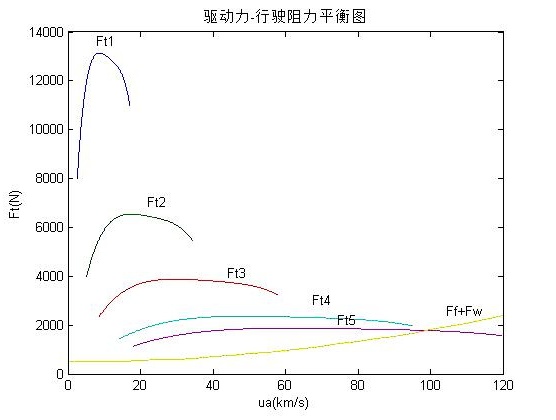
1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
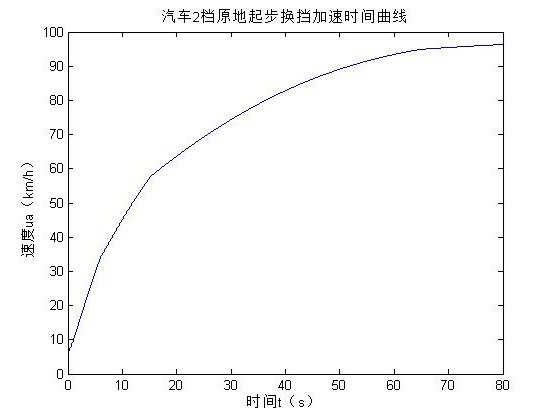
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
轻型货车的有关数据:
汽油发动机使用外特性的Tq-n曲线的拟合公式为

式中,Tq为发动机转矩(N•m);n为发动机转速(r/min)。
发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min。
装载质量 2000kg
整车整备质量 1800kg
总质量 3880kg
车轮半径 0.367m
传动系机械效率 ηt=0.85
滚动阻力系数 f=0.013
空气阻力系数×迎风面积 CDA=2.77m2
主减速器传动比 i=5.83
飞轮转动惯量 If=0.218kg•m2
二前轮转动惯量 Iw1=1.798kg•m2
四后轮转动惯量 Iw2=3.598kg•m2
变速器传动比 ig(数据如下表)
Ⅰ档 | Ⅱ档 | Ⅲ档 | Ⅳ档 | Ⅴ档 | |
四档变速器 | 6.09 | 3.09 | 1.71 | 1.00 | - |
五档变速器 | 5.56 | 2.769 | 1.644 | 1.00 | 0.793 |
轴距 L=3.2m
质心至前轴距离(满载) a=1.974m
质心高(满载) hg=0.9m
题目解答
答案
解:Matlab程序:
(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序:
n=[600:10:4000];
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;
m=3880;g=9.8;nmin=600;nmax=4000;
G=m*g;
ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;
L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;
Ft1=Tq*ig(1)*i0*nT/r;
Ft2=Tq*ig(2)*i0*nT/r;
Ft3=Tq*ig(3)*i0*nT/r;
Ft4=Tq*ig(4)*i0*nT/r;
Ft5=Tq*ig(5)*i0*nT/r;
ua1=0.377*r*n/ig(1)/i0;
ua2=0.377*r*n/ig(2)/i0;
ua3=0.377*r*n/ig(3)/i0;
ua4=0.377*r*n/ig(4)/i0;
ua5=0.377*r*n/ig(5)/i0;
ua=[0:5:120];
Ff=G*f;
Fw=CDA*ua.^2/21.15;
Fz=Ff+Fw;
plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);
title('驱动力-行驶阻力平衡图');
xlabel('ua(km/s)');
ylabel('Ft(N)');
gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw');
zoom on;
[x,y]=ginput(1);
zoom off;
disp('汽车最高车速=');disp(x);disp('km/h');
汽车最高车速=
99.3006
km/h
(2)求汽车最大爬坡度程序:
n=[600:10:4000];
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;
m=3880;g=9.8;nmin=600;nmax=4000;
G=m*g;
ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;
L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;
Ft1=Tq*ig(1)*i0*nT/r;
ua1=0.377*r*n/ig(1)/i0;
Ff=G*f;
Fw1=CDA*ua1.^2/21.15;
Fz1=Ff+Fw1;
Fi1=Ft1-Fz1;
Zoom on;
imax=100*tan(asin(max(Fi1/G)));
disp('汽车最大爬坡度=');
disp(imax);
disp('%');
汽车最大爬坡度=
35.2197%
(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:
clear
n=[600:10:4000];
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;
m=3880;g=9.8;nmin=600;nmax=4000;
G=m*g;
ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;
L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;
Ft1=Tq*ig(1)*i0*nT/r;
Ft2=Tq*ig(2)*i0*nT/r;
Ft3=Tq*ig(3)*i0*nT/r;
Ft4=Tq*ig(4)*i0*nT/r;
Ft5=Tq*ig(5)*i0*nT/r;
ua1=0.377*r*n/ig(1)/i0;
ua2=0.377*r*n/ig(2)/i0;
ua3=0.377*r*n/ig(3)/i0;
ua4=0.377*r*n/ig(4)/i0;
ua5=0.377*r*n/ig(5)/i0;
Fw1=CDA*ua1.^2/21.15;
Fw2=CDA*ua2.^2/21.15;
Fw3=CDA*ua3.^2/21.15;
Fw4=CDA*ua4.^2/21.15;
Fw5=CDA*ua5.^2/21.15;
Ff=G*f;
deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2);
deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);
deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2);
deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);
deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);
a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;
a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;
a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;
a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;
a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;
plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);
axis([0 99 0 10]);
title('汽车的加速度倒数曲线');
xlabel('ua(km/h)');
ylabel('1/a');
gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');
a=max(a1);
af=asin(max(Ft1-Ff-Fw1)/G);
C=tan(af)/(a/L+hg*tan(af)/L);
disp('假设后轮驱动,最大爬坡度相应的附着率=');
disp(C);
假设后轮驱动,最大爬坡度相应的附着率=
0.4219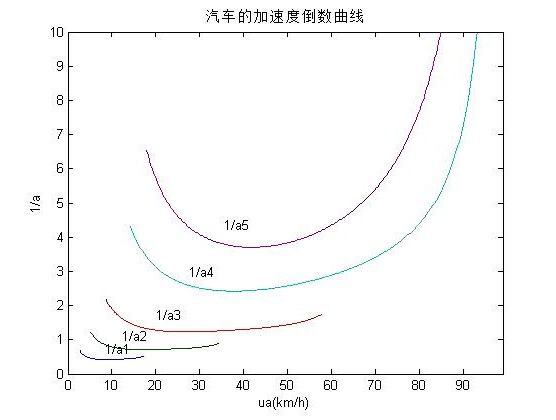
(4) >>clear
nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;
Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;
G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];
nmin=600;nmax=4000;
u1=0.377*r*nmin./ig/i0;
u2=0.377*r*nmax./ig/i0;
deta=0*ig;
for i=1:5
deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);
end
ua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;
Ff=G*f;
Fw=CDA*ua.^2/21.15;
for i=1:N
k=i;
if ua(i)<=u2(2)
n=ua(i)*(ig(2)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*ig(2)*i0*nT/r;
inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
elseif ua(i)<=u2(3)
n=ua(i)*(ig(3)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*ig(3)*i0*nT/r;
inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
elseif ua(i)<=u2(4)
n=ua(i)*(ig(4)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*ig(4)*i0*nT/r;
inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
else
n=ua(i)*(ig(5)*i0/r)/0.377;
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;
Ft=Tq*ig(5)*i0*nT/r;
inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));
delta(i)=0.01*inv_a(i)/3.6;
end
a=delta(1:k);
t(i)=sum(a);
end
plot(t,ua);
axis([0 80 0 100]);
title('汽车2档原地起步换挡加速时间曲线');
xlabel('时间t(s)');
ylabel('速度ua(km/h)');
>> ginput
ans =
25.8223 70.0737
25.7467 70.0737
所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s