题目
0879满载时,后制动器[1]损坏,汽车制动距离 Sm3=13.59865.11二自由度轿车模型的有关参数如下:总质里m=1818.2kg绕Oz轴转动惯量I z 3885 kg m轴距L=3.048m质心至前轴距离a=1.463m质心至后轴距离b=1.585m前轮总侧偏刚度k1=-62618N/rad后轮总侧偏刚度k2=-110185N/rad转向系总传动比i=20试求:1) 稳定性因数K、特征车速Uch。2) 稳态横摆角速度增益曲线 — Ua、车速u=22.35m/s 时的转向灵敏度—s sw3) 静态储备系数 S.M.,侧向加速度为 0.4g时的前、后轮侧偏角绝对值之差1 2与转弯半径的比值 R/Ro(Ro=15m)。4) 车速u=30.56m/s 时,瞬态响应的横摆角速度波动的固有(圆)频率 °、阻尼比、反应时间 与峰值反应时间
0879
满载时,后制动器[1]损坏,汽车制动距离 Sm3=
13.5986
5.11二自由度轿车模型的有关参数如下:
总质里 | m=1818.2kg |
绕Oz轴转动惯量 | I z 3885 kg m |
轴距 | L=3.048m |
质心至前轴距离 | a=1.463m |
质心至后轴距离 | b=1.585m |
前轮总侧偏刚度 | k1=-62618N/rad |
后轮总侧偏刚度 | k2=-110185N/rad |
转向系总传动比 | i=20 |
试求: |
1) 稳定性因数K、特征车速Uch。
2) 稳态横摆角速度增益曲线 — Ua、车速u=22.35m/s 时的转向灵敏度—
s sw
3) 静态储备系数 S.M.,侧向加速度为 0.4g时的前、后轮侧偏角绝对值之差
1 2与转弯半径的比值 R/Ro(Ro=15m)。
4) 车速u=30.56m/s 时,瞬态响应的横摆角速度波动的固有(圆)频率 °、阻
尼比、反应时间 与峰值反应时间
题目解答
答案
解:Matlab程序:
m=1818.2;lz=3885;L=3.048;a=1.463;b=1.585;k1=-62618;k2=-110185;
i=20;g=9.8;R0=15;u1=30.56;
K=m*(a/k2-b/k1)/LA2;
Uch=(1/K)〈/2);% 特征车速
disp('稳定性因数(sA2/mA2)K=');
disp(K);
disp(' 特征车速 (m/s)Uch=');
km/h
disp(Uch);
u=0:0.05:30;
S=u./(L*(1+K*u.A2));% 稳态横摆角速度增益
plot(u,S);
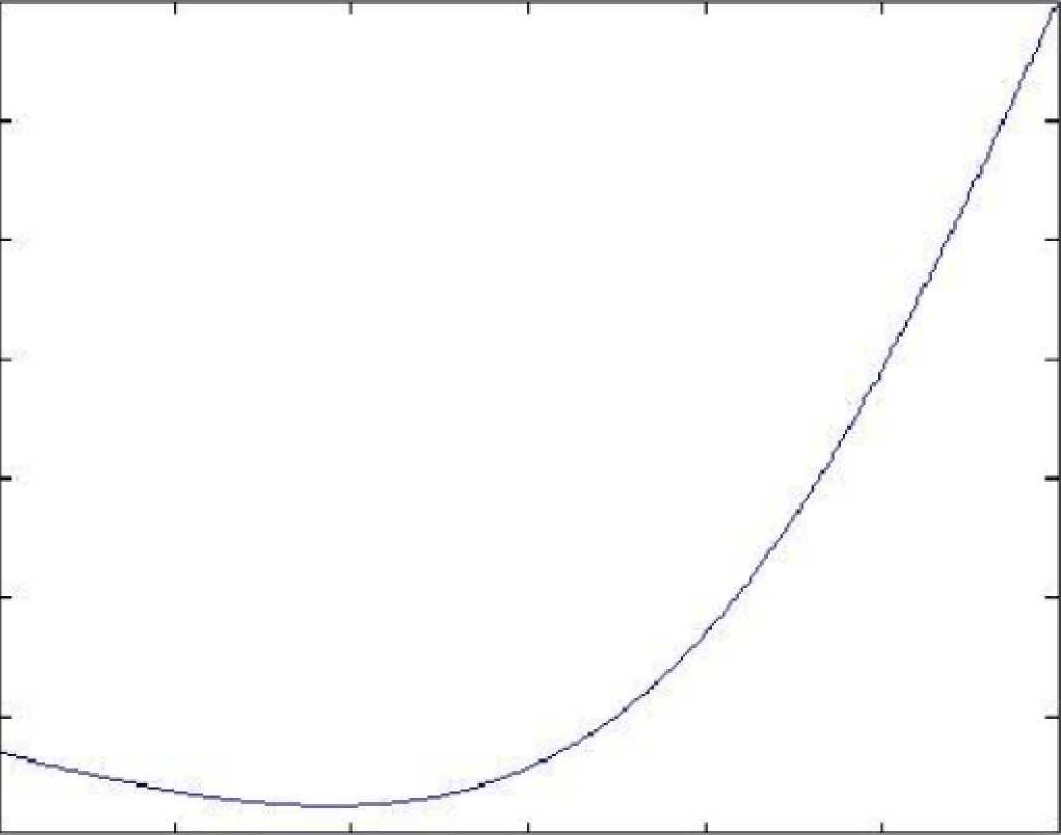
title(' 汽车稳态横摆角速度增益曲线 ');
xlabel(' 车速 u(m/s)');
ylabel(' 稳态横摆角速度增益 ');
disp('u=22.35m/s 时,转向灵敏度为 ');
disp(S(448));
SM=k2/(k1+k2)-a/L;
ay=0.4*g;
A=K*ay*L;
B=L/R0;
R=L/(B-A);
C=R/R0;% 转弯半径比
disp(' 静态储备系数 S.M.=');
disp(SM);
disp(' 侧向加速度为 0.4g 时前、后轮侧偏角绝对值之差 (rad) a1-a2='); disp(A);
disp(' 侧向加速度为 0.4g 时转弯半径比值 R/R0='); disp(C);
W0=L/u1*(k1*k2/(m*lz)*(1+K*uM2)F(1/2);% 固有(圆)频率
D=(-m*(k1*aA2+k2*bA2)-lz*(k1+k2))/(2*L*(m*lz*k1*k2*(1+K*uM2)F(1
/2));% 阻尼比
t=ata n((1-DA2)A(1/2)/(-m*u1*a*W0/(L*k2)-D))/(W0*(1-DA2F(1/2));%
应时间
E=ata n( (1-DA2F(1/2)/D)/(W0*(1-DA2F(1/2))+t;% 峰值反应时间
disp(' 车速 u=30.56m/s 时的瞬态响应参数分别为: ');
disp('横摆角速度波动的固有(圆)频率(rad)为');
disp(W0);
disp(' 阻尼比为 ');
disp(D);
disp('反应时间(s)为');
disp(t);
disp('峰值反应时间(s)为');
disp(E);
稳定性因数(sA2/mA2)K=
0.0024
特征车速 (m/s)Uch=
20.6053
u=22.35m/s 时,转向灵敏度为
3.3690
静态储备系数 S.M.=
0.1576
侧向加速度为 0.4g 时前、后轮侧偏角绝对值之差
0.0281
侧向加速度为 0.4g 时转弯半径比值 R/R0=
1.1608
车速 u=30.56m/s 时的瞬态响应参数分别为: 横摆角速度波动的固有 (圆)频率 (rad) 为
5.5758
阻尼比为
0.5892
反应时间(s)为
0.1811
峰值反应时间(s)为
0.3899