题目
第五章汽车的操纵稳定性5.11二自由度轿车模型的有关参数如下:总质量 m=1818.2kg绕Oz轴转动惯量 =3885kgcdot (m)^2轴距 L=3.048m质心至前轴距离 a=1.463m质心至后轴距离 b=1.585m前轮总侧偏刚度 k1=-62618N/rad后轮总侧偏刚度 k2=-110185N/rad转向系总传动比 i=20试求:1)稳定性因数K、特征车速uch。2)稳态横摆角速度增益曲线=3885kgcdot (m)^2、车速u=22.35m/s时的转向灵敏度=3885kgcdot (m)^2。3)静态储备系数S.M.,侧向加速度为0.4g时的前、后轮侧偏角绝对值之差=3885kgcdot (m)^2与转弯半径的比值R/R(R=15m)。4)车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率=3885kgcdot (m)^2、阻尼比=3885kgcdot (m)^2、反应时间=3885kgcdot (m)^2与峰值反应时间=3885kgcdot (m)^2注意:2)所求的转向灵敏度=3885kgcdot (m)^2中的=3885kgcdot (m)^2是指转向盘转角,除以转向系传动比才是车轮转角。
第五章汽车的操纵稳定性
5.11二自由度轿车模型的有关参数如下:
总质量 m=1818.2kg
绕Oz轴转动惯量 
轴距 L=3.048m
质心至前轴距离 a=1.463m
质心至后轴距离 b=1.585m
前轮总侧偏刚度 k1=-62618N/rad
后轮总侧偏刚度 k2=-110185N/rad
转向系总传动比 i=20
试求:
1)稳定性因数K、特征车速uch。
2)稳态横摆角速度增益曲线 、车速u=22.35m/s时的转向灵敏度
、车速u=22.35m/s时的转向灵敏度 。
。
3)静态储备系数S.M.,侧向加速度为0.4g时的前、后轮侧偏角绝对值之差 与转弯半径的比值R/R(R=15m)。
与转弯半径的比值R/R(R=15m)。
4)车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率 、阻尼比
、阻尼比 、反应时间
、反应时间 与峰值反应时间
与峰值反应时间
注意:2)所求的转向灵敏度中的 是指转向盘转角,除以转向系传动比才是车轮转角。
是指转向盘转角,除以转向系传动比才是车轮转角。
题目解答
答案
解:
1)稳定性因数

特征车速
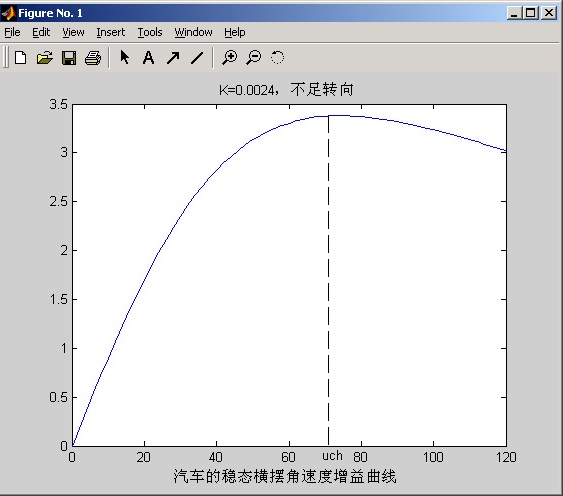
2)稳态横摆角速度增益曲线如下图所示:
车速u=22.35m/s时的转向灵敏度 /20=0.168
/20=0.168
3)态储备系数 ,
,
 时前、后轮侧偏角绝对值之差
时前、后轮侧偏角绝对值之差


4)速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率 ,
,
阻尼比 ,
,
反应时间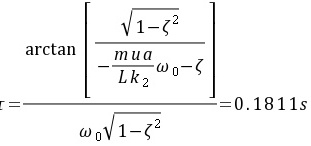
峰值反应时间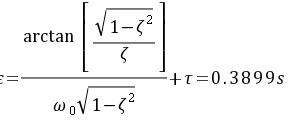
解析
步骤 1:计算稳定性因数K
稳定性因数K的计算公式为:$K=\dfrac{m}{L^2}(\dfrac{a}{k_1}-\dfrac{b}{k_2})$,其中m为总质量,L为轴距,a为质心至前轴距离,b为质心至后轴距离,k1为前轮总侧偏刚度,k2为后轮总侧偏刚度。
步骤 2:计算特征车速uch
特征车速uch的计算公式为:$u_{ch}=\sqrt{\dfrac{1}{K}}$,其中K为稳定性因数。
步骤 3:计算稳态横摆角速度增益曲线$n-(\dfrac{8}{10})$
稳态横摆角速度增益曲线$n-(\dfrac{8}{10})$的计算公式为:$n=\dfrac{1}{1+Ku^2}$,其中K为稳定性因数,u为车速。
步骤 4:计算车速u=22.35m/s时的转向灵敏度wr sw
转向灵敏度wr sw的计算公式为:$\dfrac{\omega_r}{S_{sw}}=\dfrac{1}{i}\dfrac{1}{1+Ku^2}$,其中i为转向系总传动比,K为稳定性因数,u为车速。
步骤 5:计算静态储备系数S.M.
静态储备系数S.M.的计算公式为:$S.M.=\dfrac{a'-a}{L}=\dfrac{k_2}{k_1+k_2}-\dfrac{a}{L}$,其中a'为质心至前轴距离,a为质心至后轴距离,k1为前轮总侧偏刚度,k2为后轮总侧偏刚度,L为轴距。
步骤 6:计算侧向加速度为0.4g时的前、后轮侧偏角绝对值之差${x}_{1}-{a}_{2}$与转弯半径的比值R/R(R=15m)
侧向加速度为0.4g时的前、后轮侧偏角绝对值之差${x}_{1}-{a}_{2}$与转弯半径的比值R/R(R=15m)的计算公式为:${x}_{1}-{a}_{2}=R\cdot a_y$,其中R为转弯半径,a_y为侧向加速度。
步骤 7:计算车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率、阻尼比、反应时间与峰值反应时间
瞬态响应的横摆角速度波动的固有(圆)频率、阻尼比、反应时间与峰值反应时间的计算公式为:${\omega}_0=\dfrac{L}{u}\sqrt{\dfrac{k_1k_2}{mL^2}}(1+K^2)$,$\zeta=\dfrac{-m(a^2k_1+b^2k_2)-L^2(k_1+k_2)}{2L\sqrt{mL^2k_1k_2(1+K^2)}}$,$t_r=\dfrac{1}{\omega_0\sqrt{1-\zeta^2}}\arctan\left(\dfrac{\sqrt{1-\zeta^2}}{\zeta}\right)$,$t_p=\dfrac{\pi}{\omega_0\sqrt{1-\zeta^2}}$,其中m为总质量,L为轴距,a为质心至前轴距离,b为质心至后轴距离,k1为前轮总侧偏刚度,k2为后轮总侧偏刚度,K为稳定性因数,u为车速。
稳定性因数K的计算公式为:$K=\dfrac{m}{L^2}(\dfrac{a}{k_1}-\dfrac{b}{k_2})$,其中m为总质量,L为轴距,a为质心至前轴距离,b为质心至后轴距离,k1为前轮总侧偏刚度,k2为后轮总侧偏刚度。
步骤 2:计算特征车速uch
特征车速uch的计算公式为:$u_{ch}=\sqrt{\dfrac{1}{K}}$,其中K为稳定性因数。
步骤 3:计算稳态横摆角速度增益曲线$n-(\dfrac{8}{10})$
稳态横摆角速度增益曲线$n-(\dfrac{8}{10})$的计算公式为:$n=\dfrac{1}{1+Ku^2}$,其中K为稳定性因数,u为车速。
步骤 4:计算车速u=22.35m/s时的转向灵敏度wr sw
转向灵敏度wr sw的计算公式为:$\dfrac{\omega_r}{S_{sw}}=\dfrac{1}{i}\dfrac{1}{1+Ku^2}$,其中i为转向系总传动比,K为稳定性因数,u为车速。
步骤 5:计算静态储备系数S.M.
静态储备系数S.M.的计算公式为:$S.M.=\dfrac{a'-a}{L}=\dfrac{k_2}{k_1+k_2}-\dfrac{a}{L}$,其中a'为质心至前轴距离,a为质心至后轴距离,k1为前轮总侧偏刚度,k2为后轮总侧偏刚度,L为轴距。
步骤 6:计算侧向加速度为0.4g时的前、后轮侧偏角绝对值之差${x}_{1}-{a}_{2}$与转弯半径的比值R/R(R=15m)
侧向加速度为0.4g时的前、后轮侧偏角绝对值之差${x}_{1}-{a}_{2}$与转弯半径的比值R/R(R=15m)的计算公式为:${x}_{1}-{a}_{2}=R\cdot a_y$,其中R为转弯半径,a_y为侧向加速度。
步骤 7:计算车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率、阻尼比、反应时间与峰值反应时间
瞬态响应的横摆角速度波动的固有(圆)频率、阻尼比、反应时间与峰值反应时间的计算公式为:${\omega}_0=\dfrac{L}{u}\sqrt{\dfrac{k_1k_2}{mL^2}}(1+K^2)$,$\zeta=\dfrac{-m(a^2k_1+b^2k_2)-L^2(k_1+k_2)}{2L\sqrt{mL^2k_1k_2(1+K^2)}}$,$t_r=\dfrac{1}{\omega_0\sqrt{1-\zeta^2}}\arctan\left(\dfrac{\sqrt{1-\zeta^2}}{\zeta}\right)$,$t_p=\dfrac{\pi}{\omega_0\sqrt{1-\zeta^2}}$,其中m为总质量,L为轴距,a为质心至前轴距离,b为质心至后轴距离,k1为前轮总侧偏刚度,k2为后轮总侧偏刚度,K为稳定性因数,u为车速。