试画出图中构件AB的受力图。未画重力的物体的重量均不计,所有接触处均为光滑接触。F-|||-W2-|||-Ay-|||-W1-|||-FAxF-|||-W2-|||-Ay-|||-W1-|||-FAx⏺习题 ·2-1 试计算图2-31中力F对点O之矩。 图2-31·2-4 平面力系中各力大小分别为,作用位置如图2-34所示,图中尺寸的单位为mm。试求力系向O点和O点简化的结果。 图2-34·2-6 外伸梁的支承和载荷如图2-36所示。已知F=2kN,M=2.5 kN·m,q=1kN/m。不计梁重,试求梁的支座反力。F-|||-W2-|||-Ay-|||-W1-|||-FAx图2-36·2-11 曲柄滑块机构在图2-41所示位置平衡,已知滑块上所受的力F=400N,如不计所有构件的重量,试求作用在曲柄OA上的力偶的力偶矩M。F-|||-W2-|||-Ay-|||-W1-|||-FAx 图2-41F-|||-W2-|||-Ay-|||-W1-|||-FAx·2-15 屋架桁架如图2-45所示,已知载荷F=10kN。试求杆1、2、3、4、5和6的内力。图2-45·3-20 如图3-45所示,货物重为W=10kN,用绞车匀速地沿斜面提升,绞车鼓轮重力为W=1kN,鼓轮直径d=240mm,A为径向止推轴承,B为径向轴承,十字杠杆的四臂各长1m,在每臂端点作用一圆周力F。试求力F的大小及A、B两轴承的约束反力。图3-45·3-23 试求图3-48所示各型材截面形心的位置图3-48·3-25 如图3-50所示,机床重为25kN,当水平放置时( F-|||-W2-|||-Ay-|||-W1-|||-FAx),秤上的读数为17.5kN;当 时秤上的读数为15kN。试确定机床重心的位置。F-|||-W2-|||-Ay-|||-W1-|||-FAx图3-50·4-1 如图4-9所示,偏心轮半径为R,绕轴O转动,转角φ=ωt(ω为常量),偏心距OC=e ,偏心轮带动顶杆AB沿铅垂直线作往复运动。试求顶杆的运动方程和速度。·4-3 点沿曲线AOB运动,如图4-11所示。曲线由AO、OB两段圆弧组成,AO段半径R=18m,OB段半径R=24m,取圆弧交接处O为原点,规定正方向如图。已知点的运动方程s=3+4t-t,t以s 计,s以m计。试求:(1) 点由t=0 到t=5s所经过的路程;(2)t=5s时点的加速度。 图4-11·4-4 小环M在铅垂面内沿曲杆ABCE从点A由静止开始运动,如图4-12所示。在直线段AB上,小环的加速度为g;在圆弧段BCE上,小环的切向加速度 。曲杆尺寸如图所示,试求小环在C、D两处的速度和加速度。图4-124-7 已知动点的运动方程为: 。试求其轨迹方程和速度、加速度。并求当t=1s时,点的切向加速度、法向加速度和曲率半径。(x、y的单位为m,t的单位为s)。习题·5-1 杆OA与OB长度相等且相互平行,在其上铰接一三角形板ABC,尺寸如图5-15所示。图示瞬时,曲柄OA的角速度为ω=5rad/s,角加速度为α=2rad/s ,试求三角板上点C和点D在该瞬时的速度和加速度。·5-3 电机转子的角加速度与时间t成正比,当t=0时,初角速度等于零。经过3s后,转子转过6圈。试写出转子的转动方程,并求t=2s时转子的角速度。·5-4 杆OA可绕定轴O转动。一绳跨过定滑轮B,其一端系于杆OA上A点,另一端以匀速u向下拉动,如图5-16所示。设OA=OB=l,初始时φ=0 ,试求杆OA的转动方程。·5-5 如图5-17所示,电动机轴上的小齿轮A驱动连接在提升铰盘上的齿轮B,物块M从其静止位置被提升,以匀加速度升高到1.2m时获得速度0.9m/s。试求当物块经过该位置时:(1)绳子上与鼓轮相接触的一点C的加速度;(2)小齿轮A的角速度和角加速度。(本例图中尺寸放大10倍)·5-6 图5-18所示机构中,杆AB以匀速v向上滑动,通过滑块A带动摇杆OC绕O轴作定轴转动。开始时φ=0,试求当φ=π/4时,摇杆OC的角速度和角加速度。F-|||-W2-|||-Ay-|||-W1-|||-FAx图5-18习题6-1、如图所示,光点M 沿y 轴作谐振动,其运动方程为x = 0, y = a cos(kt + β )如将点M 投影到感光记录纸上,此纸以等速向左运动。求点M 在记录纸上的轨迹。6-2、水流在水轮机工作轮入口处的绝对速度15 m/s ,并与直径成β = 60°角,如图所示,工作轮的半径R = 2m,转速n = 30 r/min。为避免水流与工作轮叶片相冲击,叶片应恰当地安装,以使水流对工作轮的相对速度与叶片相切。求在工作轮外缘处水流对工作轮的相对速度的大小方向。6-3、如图所示,瓦特离心调速器以角速度ω 绕铅直轴转动。由于机器负荷的变化,调速器重球以角速度ω1 向外张开。如ω = 10 rad/s ,ω1= 1.2 rad/s,球柄长l = 500mm,悬挂球柄的支点 到铅直轴的距离为e = 50 mm,球柄与铅直轴间所成的交角β= 30°。求此时重球的绝对速度。6-4、车床主轴的转速n = 30 r/min,工件的直径d = 40 mm,如图所示。如车刀横向走刀速度为v = 10 mm/s,求车刀对工件的相对速度。6-5、图所示曲柄滑道机构中,曲柄长OA = r,并以等角速度ω 绕轴O转动。装在水平杆上的滑槽DE 与水平线成60°角。求当曲柄与水平线的交角分别为ϕ = 0°,30°,60°时,杆BC的速度。F-|||-W2-|||-Ay-|||-W1-|||-FAx6-6、图所示公路上行驶的两车速度都恒为72 km/h。图示瞬时,在车B 中的观察者看来,车A 的速度、加速度应为多大?6-7、剪切金属板的‘ 飞剪机’ 结构如图。工作台AB 的移动规律是F-|||-W2-|||-Ay-|||-W1-|||-FAx,滑块C 带动上刀片E 沿导柱运动以切断工件D,下刀片F 固定在工作台上。设曲柄OC = 0.6 m,t = 1 s时,ϕ = 60°。求该瞬时刀片E 相对于工作台运动的速度和加速度,并求曲柄OC 转动的角速度及角加速度。F-|||-W2-|||-Ay-|||-W1-|||-FAx6-8、牛头刨床机构如图所示。已知200 mm,角速度,ω1 = 2 rad/s。求图示位置滑枕CD 的速度和加速度。习题7-1、半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动,如图所示。如曲柄OA 以等角加速度α 绕轴O 转动,当运动开始时,角速度ω0= 0,转角ϕ 0 =0 。求动齿轮以中心A 为基点的平面运动方程。7-2、如图所示,在筛动机构中,筛子的摆动是由曲柄杆机构所带动。已知曲柄OA 的转速 nOA = 40 r /min ,OA = 0.3 m。当筛子BC 运动到与点O 在同一水平线上时,∠BAO = 90°。求此瞬时筛子BC 的速度。7-3、四连杆机构中,连杆AB 上固结1 块三角板ABD,如图9-6a 所示。机构由曲柄O1A带动。已知曲柄的角速度ωO1 A = 2 rad/s;曲柄O1 A =0.1 m ,水平距离O 1 O2 = 0.05 m ,AD = 0.05 m;当O 1 A铅直时,AB 平行于O1 O2 ,且AD与A O1在同1 直线上;角ϕ = 30°。求三角板ABD 的角速度和点D 的速度。F-|||-W2-|||-Ay-|||-W1-|||-FAx7-4、图所示双曲柄连杆机构的滑块B 和E 用杆BE 连接。主动曲柄OA 和从动曲柄OD 都绕O 轴转动。主动曲柄OA 以等角速度ω0 = 12 rad/s转动。已知机构的尺寸为:OA=0.1m,OD=0.12 m,A. 垂直于滑块的导轨方向时,从动曲柄 B. OD 和连杆DE 的角速度。 C. F-|||-W2-|||-Ay-|||-W1-|||-FAx D. O A 1 绕轴O 1 转动,并借连杆AB 带动曲柄OB;而曲柄OB 活 E. O 上,如图所示。在轴O 上装有齿轮I,齿轮II 与连杆AB 固结于一体。已知: F. O 1=6 rad/s。 G. OB 和齿轮I 的角速度。所示蒸汽机传动机构中,已知:活塞的速度为v ;O1 A1 = a1 , O2 A2 = a2 ,水平,杆B1 B2铅直,A1,A2 和O1,O2 都在同1 条铅直线上时,求齿轮O1 的角速度。F-|||-W2-|||-Ay-|||-W1-|||-FAx的全加速度。习题 ·8-1 如图8-6所示,一质量为700kg的载货小车以v=1.6m/s的速度沿缆车轨道下降,轨道的倾角α=15°,运动总阻力系数f=0.015;求小车匀速下降时缆索的拉力。又设小车的制动时间为t=4s,在制动时小车作匀减速运动,试求此时缆绳的拉力。O轴匀速转动,转速为n=120r/min。试求当曲柄OA运动至水平向右及铅垂向上两位置时,作用在活塞上的气体压力。曲柄质量不计。R,试求卫星的运行速度及周期与高度h的关系。和的质量分别为600kg和800kg,在水平轨道上分别以匀速vA=1m/s,vB=0.4m/s运动。一质量为40kg的重物以俯角30°,速度vC=2m/s落入A车内,A车与B车相碰后紧接在一起运动。试求两车共同的速度。摩擦忽略不计。质量为m1。转轴O为其质心。重物的质量为m2,重物的质量为m3。斜面光滑,倾角为θ。已知重物B的加速度为a,试求轴承O处的约束反力。Oxy内运动,其运动方程为:F-|||-W2-|||-Ay-|||-W1-|||-FAx。其中a、b和ω均为常量。试求质点对坐标原点O的动量矩。·10-2 试求图10-14所示各均质物体对其转轴的动量矩。各物体质量均为m。F-|||-W2-|||-Ay-|||-W1-|||-FAx 图10-14m1、m2的重物M1、M2分别系在绳子的两端,如图10-18所示。两绳分别绕在半径为r1、r2并固结在一起的两鼓轮上,设两鼓轮对O轴的转动惯量为JO,试求鼓轮的角加速度。F-|||-W2-|||-Ay-|||-W1-|||-FAx 图10-18OC=AC=BC=l,如图11-23所示。滑块A和B的质量都等于m1。如作用在曲柄上的力偶矩为M,不计摩擦,试求曲柄的角加速度。F-|||-W2-|||-Ay-|||-W1-|||-FAx 图11-23R=0.6m。试求使钢球在F-|||-W2-|||-Ay-|||-W1-|||-FAx处脱离滚筒的滚筒转速。F-|||-W2-|||-Ay-|||-W1-|||-FAx 图12-4沿与铅垂面夹角θ=60o的悬臂梁下滑,如图12-2a所示。不计梁的自重,并忽略物块的尺寸,试求当物块下滑至距固定端O的距离l=0.6m,加速度a=2m/s2时固定端O的约束反力。F-|||-W2-|||-Ay-|||-W1-|||-FAx 图12-21=ma,不带负号。)
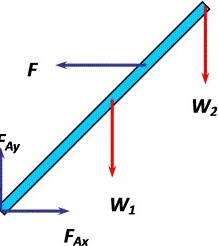
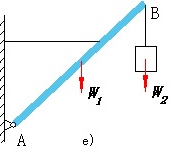
试画出图中构件AB的受力图。未画重力的物体的重量均不计,所有接触处均为光滑接触。
⏺习题 ·2-1 试计算图2-31中力F对点O之矩。
图2-31
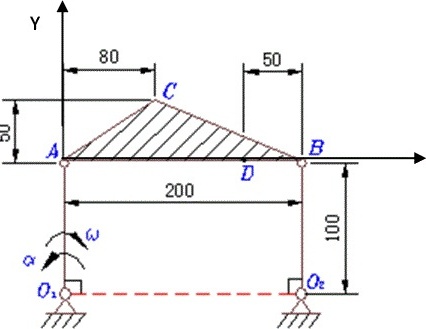
·2-4 平面力系中各力大小分别为,作用位置如图2-34所示,图中尺寸的单位为mm。试求力系向O点和O点简化的结果。
图2-34
·2-6 外伸梁的支承和载荷如图2-36所示。已知F=2kN,M=2.5 kN·m,q=1kN/m。不计梁重,试求梁的支座反力。
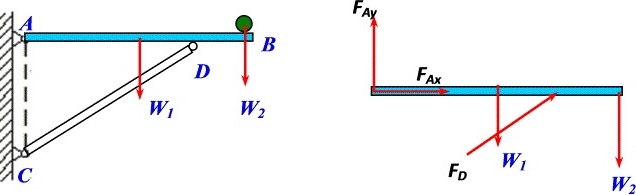
图2-36
·2-11 曲柄滑块机构在图2-41所示位置平衡,已知滑块上所受的力F=400N,如不计所有构件的重量,试求作用在曲柄OA上的力偶的力偶矩M。
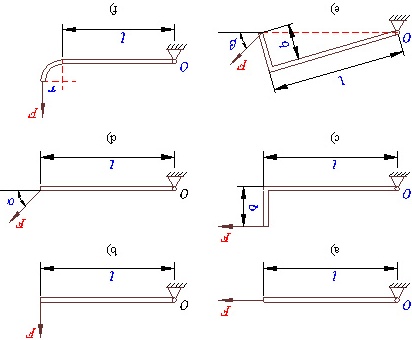 图2-41
图2-41
 ·2-15 屋架桁架如图2-45所示,已知载荷F=10kN。试求杆1、2、3、4、5和6的内力。
·2-15 屋架桁架如图2-45所示,已知载荷F=10kN。试求杆1、2、3、4、5和6的内力。
图2-45
·3-20 如图3-45所示,货物重为W=10kN,用绞车匀速地沿斜面提升,绞车鼓轮重力为W=1kN,鼓轮直径d=240mm,A为径向止推轴承,B为径向轴承,十字杠杆的四臂各长1m,在每臂端点作用一圆周力F。试求力F的大小及A、B两轴承的约束反力。
图3-45
·3-23 试求图3-48所示各型材截面形心的位置
图3-48
·3-25 如图3-50所示,机床重为25kN,当水平放置时( 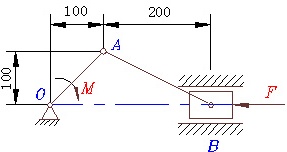 ),秤上的读数为17.5kN;当 时秤上的读数为15kN。试确定机床重心的位置。
),秤上的读数为17.5kN;当 时秤上的读数为15kN。试确定机床重心的位置。
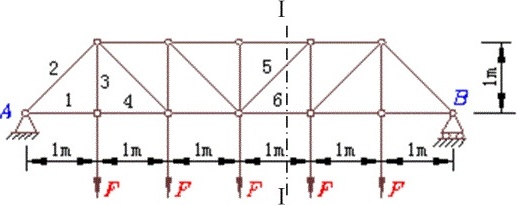
图3-50
·4-1 如图4-9所示,偏心轮半径为R,绕轴O转动,转角φ=ωt(ω为常量),偏心距OC=e ,偏心轮带动顶杆AB沿铅垂直线作往复运动。试求顶杆的运动方程和速度。
·4-3 点沿曲线AOB运动,如图4-11所示。曲线由AO、OB两段圆弧组成,AO段半径R=18m,OB段半径R=24m,取圆弧交接处O为原点,规定正方向如图。已知点的运动方程s=3+4t-t,t以s 计,s以m计。试求:(1) 点由t=0 到t=5s所经过的路程;(2)t=5s时点的加速度。
图4-11
·4-4 小环M在铅垂面内沿曲杆ABCE从点A由静止开始运动,如图4-12所示。在直线段AB上,小环的加速度为g;在圆弧段BCE上,小环的切向加速度 。曲杆尺寸如图所示,试求小环在C、D两处的速度和加速度。
图4-12
4-7 已知动点的运动方程为: 。试求其轨迹方程和速度、加速度。并求当t=1s时,点的切向加速度、法向加速度和曲率半径。(x、y的单位为m,t的单位为s)。
习题
·5-1 杆OA与OB长度相等且相互平行,在其上铰接一三角形板ABC,尺寸如图5-15所示。图示瞬时,曲柄OA的角速度为ω=5rad/s,角加速度为α=2rad/s ,试求三角板上点C和点D在该瞬时的速度和加速度。
·5-3 电机转子的角加速度与时间t成正比,当t=0时,初角速度等于零。经过3s后,转子转过6圈。试写出转子的转动方程,并求t=2s时转子的角速度。
·5-4 杆OA可绕定轴O转动。一绳跨过定滑轮B,其一端系于杆OA上A点,另一端以匀速u向下拉动,如图5-16所示。设OA=OB=l,初始时φ=0 ,试求杆OA的转动方程。
·5-5 如图5-17所示,电动机轴上的小齿轮A驱动连接在提升铰盘上的齿轮B,物块M从其静止位置被提升,以匀加速度升高到1.2m时获得速度0.9m/s。试求当物块经过该位置时:(1)绳子上与鼓轮相接触的一点C的加速度;(2)小齿轮A的角速度和角加速度。(本例图中尺寸放大10倍)
·5-6 图5-18所示机构中,杆AB以匀速v向上滑动,通过滑块A带动摇杆OC绕O轴作定轴转动。开始时φ=0,试求当φ=π/4时,摇杆OC的角速度和角加速度。

图5-18
习题
6-1、如图所示,光点M 沿y 轴作谐振动,其运动方程为
x = 0, y = a cos(kt + β )
如将点M 投影到感光记录纸上,此纸以等速向左运动。求点M 在记录纸上的轨迹。
6-2、水流在水轮机工作轮入口处的绝对速度15 m/s ,并与直径成β = 60°角,如图所示,工作轮的半径R = 2m,转速n = 30 r/min。为避免水流与工作轮叶片相冲击,叶片应恰当地安装,以使水流对工作轮的相对速度与叶片相切。求在工作轮外缘处水流对工作轮的相对速度的大小方向。
6-3、如图所示,瓦特离心调速器以角速度ω 绕铅直轴转动。由于机器负荷的变化,调速器重球以角速度ω1 向外张开。如ω = 10 rad/s ,ω1= 1.2 rad/s,球柄长l = 500mm,悬挂球柄的支点 到铅直轴的距离为e = 50 mm,球柄与铅直轴间所成的交角β= 30°。求此时重球的绝对速度。
6-4、车床主轴的转速n = 30 r/min,工件的直径d = 40 mm,如图所示。如车刀横向走刀速度为
v = 10 mm/s,求车刀对工件的相对速度。
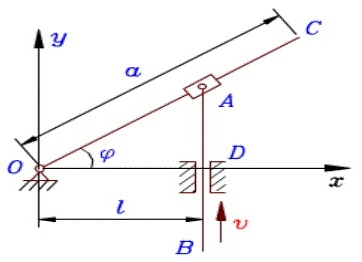
6-5、图所示曲柄滑道机构中,曲柄长OA = r,并以等角速度ω 绕轴O转动。装在水平杆上的滑槽DE 与水平线成60°角。求当曲柄与水平线的交角分别为ϕ = 0°,30°,60°时,杆BC的速度。

6-6、图所示公路上行驶的两车速度都恒为72 km/h。图示瞬时,在车B 中的观察者看来,车A 的速度、加速度应为多大?
6-7、剪切金属板的‘ 飞剪机’ 结构如图。工作台AB 的移动规律是 ,滑块C 带动上刀片E 沿导柱运动以切断工件D,下刀片F 固定在工作台上。设曲柄OC = 0.6 m,t = 1 s时,ϕ = 60°。求该瞬时刀片E 相对于工作台运动的速度和加速度,并求曲柄OC 转动的角速度及角加速度。
,滑块C 带动上刀片E 沿导柱运动以切断工件D,下刀片F 固定在工作台上。设曲柄OC = 0.6 m,t = 1 s时,ϕ = 60°。求该瞬时刀片E 相对于工作台运动的速度和加速度,并求曲柄OC 转动的角速度及角加速度。
6-8、牛头刨床机构如图所示。已知200 mm,角速度,ω1 = 2 rad/s。求图示位置滑枕CD 的速度和加速度。
习题
7-1、半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动,如图所示。如曲柄OA 以等角加速度α 绕轴O 转动,当运动开始时,角速度ω0= 0,转角ϕ 0 =0 。求动齿轮以中心A 为基点的平面运动方程。
7-2、如图所示,在筛动机构中,筛子的摆动是由曲柄杆机构所带动。已知曲柄OA 的
转速 nOA = 40 r /min ,OA = 0.3 m。当筛子BC 运动到与点O 在同一水平线上时,
∠BAO = 90°。求此瞬时筛子BC 的速度。
7-3、四连杆机构中,连杆AB 上固结1 块三角板ABD,如图9-6a 所示。机构由曲柄O1A带动。已知曲柄的角速度ωO1 A = 2 rad/s;曲柄O1 A =0.1 m ,水平距离O 1 O2 = 0.05 m ,AD = 0.05 m;当O 1 A铅直时,AB 平行于O1 O2 ,且AD与A O1在同1 直线上;角ϕ = 30°。求三角板ABD 的角速度和点D 的速度。
7-4、图所示双曲柄连杆机构的滑块B 和E 用杆BE 连接。主动曲柄OA 和从动曲柄OD 都绕O 轴
转动。主动曲柄OA 以等角速度ω0 = 12 rad/s转动。已知机构的尺寸为:OA=0.1m,OD=0.12 m,
A. 垂直于滑块的导轨方向时,从动曲柄B. OD 和连杆DE 的角速度。
C.

D. O A 1 绕轴O 1 转动,并借连杆AB 带动曲柄OB;而曲柄OB 活
E. O 上,如图所示。在轴O 上装有齿轮I,齿轮II 与连杆AB 固结于一体。已知:
F. O 1=6 rad/s。
G. OB 和齿轮I 的角速度。
所示蒸汽机传动机构中,已知:活塞的速度为v ;O1 A1 = a1 , O2 A2 = a2 ,
水平,杆B1 B2铅直,A1,A2 和O1,O2 都在同1 条铅直线上时,求齿轮O1 的角速度。
的全加速度。
习题 ·8-1 如图8-6所示,一质量为700kg的载货小车以v=1.6m/s的速度沿缆车轨道下降,轨道的倾角α=15°,运动总阻力系数f=0.015;求小车匀速下降时缆索的拉力。又设小车的制动时间为t=4s,在制动时小车作匀减速运动,试求此时缆绳的拉力。
O轴匀速转动,转速为n=120r/min。试求当曲柄OA运动至水平向右及铅垂向上两位置时,作用在活塞上的气体压力。曲柄质量不计。
R,试求卫星的运行速度及周期与高度h的关系。
和
的质量分别为600kg和800kg,在水平轨道上分别以匀速vA=1m/s,vB=0.4m/s运动。一质量为40kg的重物
以俯角30°,速度vC=2m/s落入A车内,A车与B车相碰后紧接在一起运动。试求两车共同的速度。摩擦忽略不计。
质量为m1。转轴O为其质心。重物
的质量为m2,重物
的质量为m3。斜面光滑,倾角为θ。已知重物B的加速度为a,试求轴承O处的约束反力。
Oxy内运动,其运动方程为:
 。其中a、b和ω均为常量。试求质点对坐标原点O的动量矩。
。其中a、b和ω均为常量。试求质点对坐标原点O的动量矩。·10-2 试求图10-14所示各均质物体对其转轴的动量矩。各物体质量均为m。
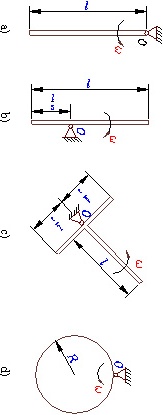 图10-14
图10-14m1、m2的重物M1、M2分别系在绳子的两端,如图10-18所示。两绳分别绕在半径为r1、r2并固结在一起的两鼓轮上,设两鼓轮对O轴的转动惯量为JO,试求鼓轮的角加速度。
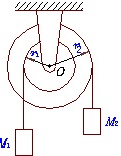 图10-18
图10-18OC=AC=BC=l,如图11-23所示。滑块A和B的质量都等于m1。如作用在曲柄上的力偶矩为M,不计摩擦,试求曲柄的角加速度。
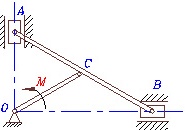 图11-23
图11-23R=0.6m。试求使钢球在
 处脱离滚筒的滚筒转速。 图12-4
处脱离滚筒的滚筒转速。 图12-4沿与铅垂面夹角θ=60o的悬臂梁下滑,如图12-2a所示。不计梁的自重,并忽略物块的尺寸,试求当物块下滑至距固定端O的距离l=0.6m,加速度a=2m/s2时固定端O的约束反力。
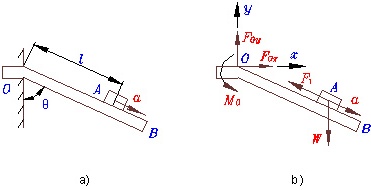 图12-2
图12-21=ma,不带负号。)
题目解答
答案
7-5 、 7-6 、