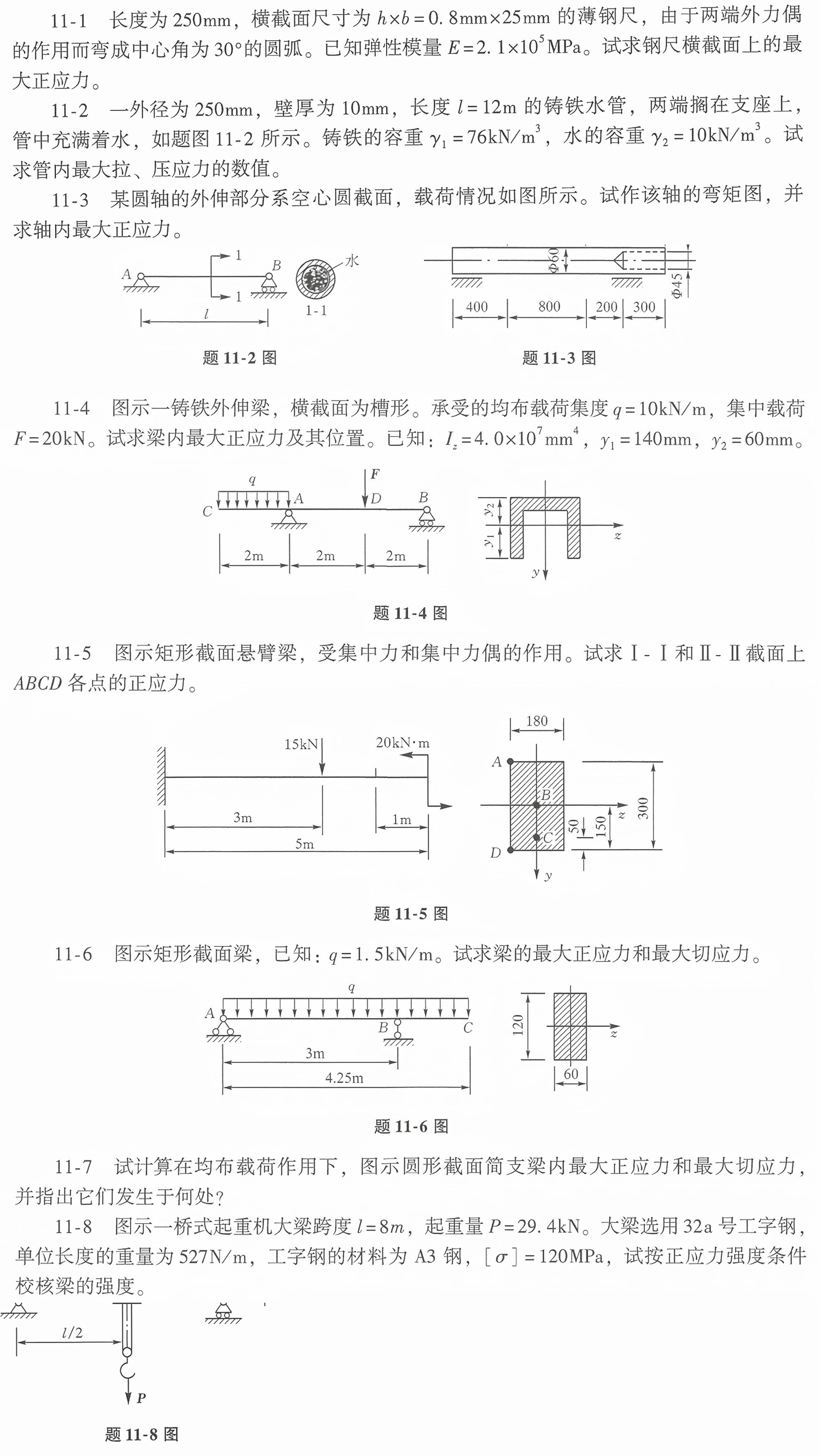
.11-1 长度为2500mm,横截面尺寸为 times b=0.8mmtimes 25mm 的薄钢尺,由于两端外力偶-|||-的作用而弯成中心角为30°的圆弧。已知弹性模量 =2.1times (10)^5MPa 。试求钢尺横截面上的最-|||-大正应力。-|||-.11-2 一外径为250mm,壁厚为10 )mm,长度 l=12m 的铸铁水管,两端搁在支座上,-|||-管中充满着水,如题图 11-2 所示。铸铁的容重 _(1)=76kN/(m)^3 ,水的容重 _(2)=10kN/(m)^3 。试-|||-求管内最大拉、压应力的数值。-|||-i 11-3 某圆轴的外伸部分系空心圆截面,载荷情况如图所示。试作该轴的弯矩图,并-|||-求轴内最大正应力。-|||-→1 B 一水-|||-A 8-|||--1 7-|||-77-|||-l 1-1 400 800 200 300-|||-题 11-2 图 题 11-3 图-|||-11-4 图示一铸铁外伸梁,横截面为槽形。承受的均布载荷集度 q=10kN/m ,集中载荷-|||-.F=20kN 。试求梁内最大正应力及其位置。已知: _(z)=4.0times (10)^7(mm)^4 ,_(1)=140mm ,_(2)=60mm 。-|||-q |F-|||-A D B-|||-C 时-|||-2m 2m 2m-|||-y-|||-题 11-4 图-|||-.11-5 图示矩形截面悬臂梁,受集中力和集中力偶的作用。试求 I-I 和 -II 截面上-|||-ABCD各点的正应力。-|||-180-|||-15kN| 20kN·m-|||-A-|||-__ 3m __ 1m-|||-__ 5m D-|||-yy ↑-|||-题 11-5 图-|||-11-6 图示矩形截面梁,已知: q=1.5kN/m 。试求梁的最大正应力和最大切应力。-|||-A-|||-B C-|||-3m-|||-4.25m 60-|||-题 11-6 图-|||-.11-7 试计算在均布载荷作用下,图示圆形截面简支梁内最大正应力和最大切应力,-|||-并指出它们发生于何处?-|||-.11-8 图示一桥式起重机大梁跨度 l=8m ,起重量 P=29.4kN 。大梁选用32a号工字钢,-|||-单位长度的重量为 527N/m ,工字钢的材料为A3钢, [ sigma ] =120MPa ,试按正应力强度条件-|||-校核梁的强度。-|||-.l/2-|||-PP-|||-题 11-8 图
题目解答
答案
解析
11-1 钢尺弯曲最大正应力计算
钢尺弯成圆弧,中心角θ=30°=π/6 rad,长度L=2500mm,半径R=L/θ≈4774.6mm。截面为矩形(h=0.8mm,b=25mm),惯性矩$I_z=\frac{bh^3}{12}\approx0.3413mm^4$。最大弯矩$M=EI_z/R$,最大正应力$σ_{max}=\frac{Mh}{2I_z}=\frac{Eθh}{2}\approx176|MPa$(计算得176MPa)。
11-2 铸铁水管应力计算
水管外径D=250mm,内径d=230mm,长度l=12m。自重弯矩$M_1=\frac{γ_1π l^2}{8}\approx11.4kN·m$,水重弯矩$M_2=\frac{γ_2b l^gα}{8}\approx10.6kN·m$,总弯矩$M≈22kN·m$。截面系数$WW=\frac{π(D^4-d^4)}{32D}\approx121600mm^3$,最大拉/压pa≈40.7MPa。
11-6 矩形截面梁应力计算
均布载荷q=1.5kN/mmm}m,跨度3+4.25=7.25m,最大弯矩$M_{max}=\frac{ql^2}{8}\approx11.9kN·m$,惯性矩$I=\frac{bh^3}{12}$(假设h=60mm,b=0.06m),$σ_{max}=\frac{Mh}{2I}\approx8.13MPa$。最大剪力$V_{max}=\frac{3ql}{16}\approx2.08kN$,切应力$τ_{max}=\frac{3V_{max}}{2A}\approx0.55MPa$。
11-8 桥式起重机大梁强度校核
32a工字钢跨度l=8m,起重量P=29.4kN,自重q=0.527kN/m。最大弯矩$M_{max}=\frac{Pl}{4}+\frac{ql^2}{8}\approx60.7kN·m$。查得$W_z=692cm^3$,$σ_{max}=\frac{M}{W_z}\approx91MPa<[σ]=120MPa$,强度满足强度。