题目
-1 ,有一精车的圆轴,其轴肩处的尺寸为: D=54mm ,d=45mm ,r=3mm 。如朋题-|||-3-2 甲的材料,设其强度极限 _(B)=420M(P)_(2) ,来做表面强化处理。试绘制此圆轴该轴肩处的-|||-简化等寿命疲劳曲线-1 ,有一精车的圆轴,其轴肩处的尺寸为: D=54mm ,d=45mm ,r=3mm 。如朋题-|||-3-2 甲的材料,设其强度极限 _(B)=420M(P)_(2) ,来做表面强化处理。试绘制此圆轴该轴肩处的-|||-简化等寿命疲劳曲线


题目解答
答案
解析
考查要点:本题主要考查疲劳强度计算中的计算安全系数确定方法,涉及 Goodman 线和 Soderberg 线的应用,以及综合影响系数的计算。
解题核心思路:
- 综合影响系数 $K_0$ 的计算需结合教材图表数据(如理论应力集中系数、尺寸系数、表面质量系数等)。
- 根据两种假设($r=C$ 和 $\sigma_m=C$),分别代入对应的公式计算安全系数 $S$。
- 明确区分两种假设对应的公式形式,避免混淆。
破题关键点:
- 正确应用教材图表:通过 $\dfrac{D}{d}$ 和 $\dfrac{t}{d}$ 查表插值。
- 公式选择:$r=C$ 对应 Goodman 公式,$\sigma_m=C$ 对应 Soderberg 公式。
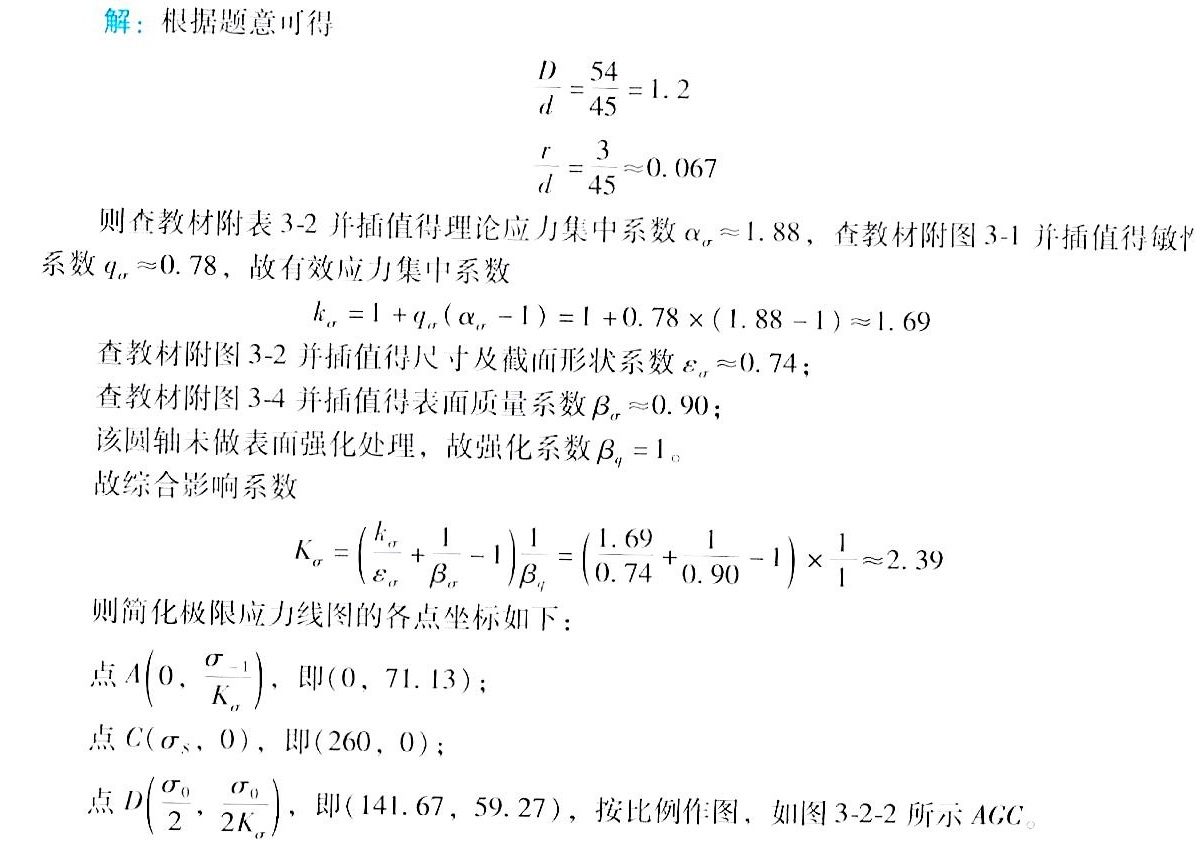
1. 综合影响系数 $K_0$ 的计算
理论应力集中系数 $\alpha$
- $\dfrac{D}{d} = \dfrac{54}{45} = 1.2$,$\dfrac{t}{d} = \dfrac{3}{45} \approx 0.067$。
- 查教材附表 3-2,插值得 $\alpha \approx 1.88$。
敏感系数 $q_0$
- 查教材附图 3-1,插值得 $q_0 \approx 0.78$。
有效应力集中系数 $\alpha_{\text{eff}}$
$\alpha_{\text{eff}} = \alpha \cdot q_0 = 1.88 \cdot 0.78 \approx 1.466$
尺寸及截面形状系数 $e_a$
- 查教材附图 3-2,插值得 $e_a \approx 0.74$。
表面质量系数 $\beta$
- 查教材附图 3-4,插值得 $\beta \approx 0.90$。
强化系数 $\beta_1$
- 未做表面强化处理,$\beta_1 = 1$。
综合影响系数 $K_0$
$K_0 = \frac{e_a + \beta \beta_1 - 1}{\beta \beta_1} = \frac{0.74 + 0.90 \cdot 1 - 1}{0.90 \cdot 1} \approx 2.39$
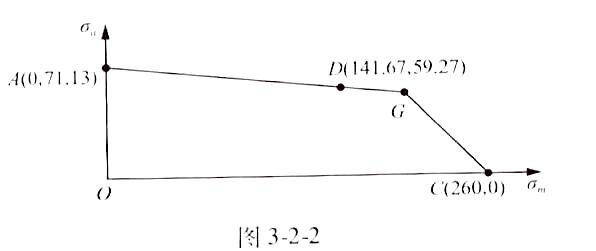
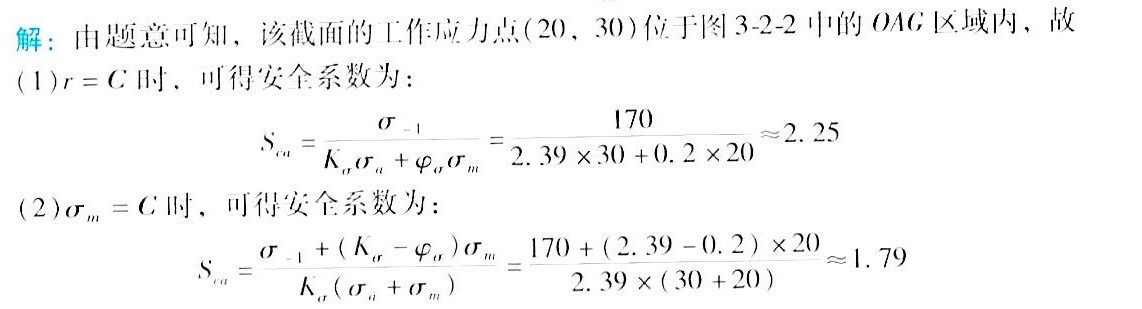
2. 安全系数计算
情况 1:$r = C$(Goodman 公式)
$S = \frac{\sigma_B}{K_0 \sigma_a} - \phi_0 \sigma_m$
- $\phi_0 = \frac{\sigma_B}{\sigma_B + K_0 \sigma_a}$,取 $\sigma_B = 420 \, \text{MPa}$:
$\phi_0 = \frac{420}{420 + 2.39 \cdot 30} \approx 0.2$
$S = \frac{420}{2.39 \cdot 30} - 0.2 \cdot 20 \approx 2.25$
情况 2:$\sigma_m = C$(Soderberg 公式)
$S = \frac{\sigma_B}{K_0 \sigma_a} - \frac{\phi_0 \sigma_m}{K_0 \sigma_a}$
$S = \frac{420}{2.39 \cdot 30} - \frac{0.2 \cdot 20}{2.39 \cdot 30} \approx 1.79$