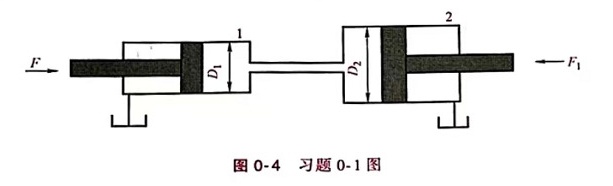
0-1 在图0-4中,两活塞缸水平放置,之间用管道连接。缸2活塞用于推动工作台,工作台运动阻力= 1962.5N,在缸1活塞上施加的作用力为F。巳知缸1活塞直径= 20mm,缸2活塞直径D2 = 50mm,试计算:1)当F=314N时密闭容积中液体压力及两活塞的运动情况。2)当F=157N时密闭容积中液体压力及两活塞的运动情况。
0-1 在图0-4中,两活塞缸水平放置,之间用管道连接。缸2活塞用于推动工作台,工作台运动阻力 = 1962.5N,在缸1活塞上施加的作用力为F。巳知缸1活塞直径
= 1962.5N,在缸1活塞上施加的作用力为F。巳知缸1活塞直径 = 20mm,缸2活
= 20mm,缸2活
塞直径D2 = 50mm,试计算:
1)当F=314N时密闭容积中液体压力及两活塞的运动情况。
2)当F=157N时密闭容积中液体压力及两活塞的运动情况。
题目解答
答案
(1)密封腔内液体压力为
 N/
N/ =1MPa
=1MPa
液体作用在活塞上的力为 =1962.5N
=1962.5N
由于工作台上的阻力为1962.5N,故活塞通过液体使活塞和工作台作等速运动,工作台速度为活塞速度的
(2)密封腔内液体压力为
 N/=0.5MPa
N/=0.5MPa
液体作用在活塞上的力为
 =981N
=981N
不足以克服工作台的阻力,两活塞都不动
解析
考查要点:本题主要考查液压传动中压力、作用力的计算,以及活塞运动条件的判断。
解题思路:
- 压力计算:根据作用力$F$和缸1活塞面积$A_1$,利用公式$P = \frac{F}{A_1}$计算密封腔内液体压力。
- 作用力分析:通过面积比$\frac{A_2}{A_1}$计算液体作用在缸2活塞上的力$F_R$,并与工作台阻力比较:
- 若$F_R \geq$阻力,则活塞运动;
- 若$F_R <$阻力,则活塞不动。
- 运动速度关系:当两活塞运动时,速度与面积成反比,即$v_2 = \frac{A_1}{A_2} v_1$。
第(1)题
计算液体压力
缸1活塞面积:
$A_1 = \frac{\pi}{4} D_1^2 = \frac{\pi}{4} \times (0.02)^2 = 0.000314 \, \text{m}^2$
液体压力:
$P = \frac{F}{A_1} = \frac{314}{0.000314} = 1 \times 10^6 \, \text{Pa} = 1 \, \text{MPa}$
计算液体作用力
液体作用在缸2活塞上的力:
$F_R = F \times \frac{A_2}{A_1} = 314 \times \left( \frac{50}{20} \right)^2 = 314 \times 6.25 = 1962.5 \, \text{N}$
比较阻力:$F_R = 1962.5 \, \text{N}$等于工作台阻力,故两活塞等速运动。
速度关系:缸2速度是缸1速度的$\frac{A_1}{A_2} = \frac{4}{25}$。
第(2)题
计算液体压力
液体压力:
$P = \frac{F}{A_1} = \frac{157}{0.000314} = 0.5 \times 10^6 \, \text{Pa} = 0.5 \, \text{MPa}$
计算液体作用力
液体作用在缸2活塞上的力:
$F_R = F \times \frac{A_2}{A_1} = 157 \times 6.25 = 981 \, \text{N}$
比较阻力:$F_R = 981 \, \text{N} < 1962.5 \, \text{N}$,故两活塞不动。