磁敏三极管的灵敏度比二极管大 倍到 倍,其工作电压的范围也较宽。(几;十几)2-4、现有栅长为3mm和5mm两种丝式应变计,其横向效应系数分别为5%和3%,欲用来测量泊松比μ=0.33的铝合金构件在单向应力状态下的应力分布(其应力分布梯度较大)。试问:应选用哪一种应变计?为什么?答:应选用栅长为5mm的应变计。由公式dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)和dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)知应力大小是通过测量应变片电阻的变化率来实现的。电阻的变化率主要由受力后金属丝几何尺寸变化所致部分(相对较大)加上电阻率随应变而变的部分(相对较小)。一般金属μ≈0.3,因此(1+2μ)≈1.6;后部分为电阻率随应变而变的部分。以康铜为例,C≈1,C(1-2μ)≈0.4,所以此时K0=Km≈2.0。显然,金属丝材的应变电阻效应以结构尺寸变化为主。从结构尺寸看,栅长为5mm的丝式应变计比栅长为3mm的应变计在相同力的作用下,引起的电阻变化大。2-5、现选用丝栅长10mm的应变计检测弹性模量E=2×1011N/m2、密度ρ=7.8g/cm3的钢构件承受谐振力作用下的应变,要求测量精度不低于0.5%。试确定构件的最大应变频率限。答:机械应变波是以相同于声波的形式和速度在材料中传播的。当它依次通过一定厚度的基底、胶层(两者都很薄,可忽略不计)和栅长dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)而为应变计所响应时,就会有时间的迟后。应变计的这种响应迟后对动态(高频)应变测量,尤会产生误差。由dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)式中dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)为声波在钢构件中传播的速度;又知道声波在该钢构件中的传播速度为:dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p);dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p);可算得dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)。2-6、为什么常用等强度悬臂梁作为应变式传感器的力敏元件? 现用一等强度梁:有效长dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)=150mm,固支处宽b=18mm,厚h=5mm,弹性模量E=2×105N/mm2,贴上4片等阻值、K=2的电阻应变计,并接入四等臂差动电桥构成称重传感器。试问: 1)悬臂梁上如何布片?又如何接桥?为什么?2)当输入电压为3V,有输出电压为2mV时的称重量为多少?答:当力F作用在弹性臂梁自由端时,悬臂梁产生变形,在梁的上、下表面对称位置上应变大小相当,极性相反,若分别粘贴应变片R1 、R4 和R2 、R3 ,并接成差动电桥,则电桥输出电压Uo与力F成正比。等强度悬臂梁的应变dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)不随应变片粘贴位置变化。1)、悬臂梁上布片如图2-20a所示。接桥方式如图2-20b所示。这样当梁上受力时,R1、R4受拉伸力作用,阻值增大,R2、R3受压,阻值减小,使差动输出电压成倍变化。可提高灵敏度。2)、当输入电压为3V,有输出电压为2mV时的称重量为:计算如下:由公式:dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)代入各参数算F=33.3N;1牛顿=0.102千克力;所以,F=3.4Kg。此处注意:F=m*g;即力=质量*重力加速度;1N=1Kg*9.8m/s2.力的单位是牛顿(N)和质量的单位是Kg;所以称得的重量应该是3.4Kg。dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p) ;2-7、何谓压阻效应?扩散硅压阻式传感器与贴片型电阻应变式传感器相比有什么优点,有什么缺点?如何克服?答:“压阻效应”是指半导体材料(锗和硅)的电阻率随作用应力的变化而变化的现象。优点是尺寸、横向效应、机械滞后都很小,灵敏系数极大,因而输出也大,可以不需放大器直接与记录仪器连接,使得测量系统简化。缺点是电阻值和灵敏系数随温度稳定性差,测量较大应变时非线性严重;灵敏系数随受拉或压而变,且分散度大,一般在(3-5)%之间,因而使得测量结果有(±3-5)%的误差。压阻式传感器广泛采用全等臂差动桥路来提高输出灵敏度,又部分地消除阻值随温度而变化的影响。2-8 、一应变片的电阻R=120Ω,k=2.05,用作应变片为800μm/m的传感元件。A. 求ΔR/R和ΔR; B. U=3V,惠斯登电桥初始平衡,求输出电压U。 C. 答:dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)此处dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)=800μm/m;所以dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p); D. dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p); E. 全桥电路连接时,输出电压可按下式计算: F. R2/R1,为桥臂比;此处取四个电阻相等,所以n=1;算得U=4.92mV。 G. R1和R2,把这两片应变片接入差动电桥(如图2-19),若钢的泊松系数μ=0.285,应变片的灵敏度系数k=2,电桥电源电压U=2V,当试件受轴向拉伸时,测得应变片的电阻变化ΔR1=0.48 Ω,求电桥的输出电压U为多少?dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)半桥电路答:由dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)轴向应变引起的电阻变化;可求的轴向应变系数dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p);总的应变系数dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p);又 dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)U0=2.567mV。4-1 有一只变极距电容传感元件,两极板重叠有效面积为8×10-4m2,两极板间的距离为1mm,已知空气的相对介电常数是1.0006,试计算该传感器的位移灵敏度。答:由变极距型电容传感器知识可知,其位移灵敏度dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p),由已知条件可知dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p),代入数据可以求得:dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)。4-2 简述电容式传感器的工作原理S、dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)或dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)发生变化时,电容量C也随之变化。如果保持其中两个参数不变,而仅改变其中一个参数,就可把该参数的变化转换为电容量的变化dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p),这就组成了电容式传感器。4-5 采用运算放大器作为电容传感器的测量电路,其输出特性是否为线性?为什么?答:采用运算放大器作为电容传感器的测量电路时,其输出/输入特性关系为:dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)。Zi及放大倍数足够大。同时,为保证仪器精度,还要求电源电压的幅值和固定电容C值稳定。6-4 什么是霍尔效应?霍尔电势与哪些因素有关?答:置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,载流导体上平行于电流和磁场方向上的两个面之间产生电动势,这种现象称霍尔效应。霍尔器件工作产生的霍尔电势为dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p),由表达式可知,霍尔电势dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)正比于激励电流dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)及磁感应强度dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p),其灵敏度dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)与霍尔系数dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)成正比,而与霍尔片厚度dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)成反比。6-5 影响霍尔元件输出零点的因素有哪些?怎样补偿?答:影响霍尔元件输出零点的因素主要是霍尔元件的初始位置。霍尔位移传感器,是由一块永久磁铁组成磁路的传感器,在霍尔元件处于初始位置dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)时,霍尔电势dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)不等于零。霍尔式位移传感器为了获得较好的线性分布,在磁极端面装有极靴,霍尔元件调整好初始位置时,可以使霍尔电势dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)=0。6-6 温度变化对霍尔元件输出电势有什么影响?如何补偿?T倍。补偿温度变化对霍尔电势的影响,通常采用一种恒流源补偿电路。基本思想是:在温度增加的同时,让激励电流dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)相应地减小,并能保持dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)乘积不变,也就可以相对抵消温度对灵敏系数dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)增加的影响,从而抵消对霍尔电势的影响。dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)7-1在炼钢厂中,有时直接将廉价热电极(易耗 品,例如镍铬、镍硅热偶丝,时间稍长即熔化)插入钢水中测量钢水温度,如图 7-27所示。试说明测量钢水温度的基本原理?为什么不必将工作端焊在一起? 要满足哪些条件才不影响测量精度?采用上述方法是利用了热电偶的什么定律?如果被测物不是钢水,而是熔化的塑料行吗?为什么?答:测量钢水温度的基本原理是利用了热电效应;因为钢水是导体,又处在同一个温度下,把钢水看作是第三导体接入,利用了热电偶的导体接入定律;如果被测物不是钢水,而是熔化的塑料不行,因为,塑料不导电,不能形成热电势。(K)热电偶测温度,已知冷端温度dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)为40℃,用高精度毫伏表测得这时的热电势为29.186mV ,求被测点温度?K分度表,热电偶在40℃时相对于0℃的热电势为:1.6118mV;由公式:dfrac (R)(R)=(1+2mu )(varepsilon )_(x)+dfrac (dp)(p)V=30.798mV;K分度表得被测点温度值为:740℃。XCT-101 型动圈仪表组成的热电偶测温、控温电路。请正确连线。V交流电从接线排引入,经过交流接触器,到退火电炉主加热回路。V单相电给控制盒,获得低压直流电,给检测回路供电;热电偶接入控制盒输入端,经内部处理电路,控制直流继电器线圈,用直流继电器的常开触点控制交流接触器的线圈电压。L1火线经过交流接触器的线圈一端,线圈另一端接直流继电器的常开触电端,直流继电器的公共端接交流电的零线。使得当直流继电器吸合时,交流接触器线圈得点,吸合。
磁敏三极管的灵敏度比二极管大 倍到 倍,其工作电压的范围也较宽。(几;十几)
2-4、现有栅长为3mm和5mm两种丝式应变计,其横向效应系数分别为5%和3%,欲用来测量泊松比μ=0.33的铝合金构件在单向应力状态下的应力分布(其应力分布梯度较大)。试问:应选用哪一种应变计?为什么?
答:应选用栅长为5mm的应变计。由公式 和
和 知应力大小是通过测量应变片电阻的变化率来实现的。电阻的变化率主要由受力后金属丝几何尺寸变化所致部分(相对较大)加上电阻率随应变而变的部分(相对较小)。一般金属μ≈0.3,因此(1+2μ)≈1.6;后部分为电阻率随应变而变的部分。以康铜为例,C≈1,C(1-2μ)≈0.4,所以此时K0=Km≈2.0。显然,金属丝材的应变电阻效应以结构尺寸变化为主。从结构尺寸看,栅长为5mm的丝式应变计比栅长为3mm的应变计在相同力的作用下,引起的电阻变化大。
知应力大小是通过测量应变片电阻的变化率来实现的。电阻的变化率主要由受力后金属丝几何尺寸变化所致部分(相对较大)加上电阻率随应变而变的部分(相对较小)。一般金属μ≈0.3,因此(1+2μ)≈1.6;后部分为电阻率随应变而变的部分。以康铜为例,C≈1,C(1-2μ)≈0.4,所以此时K0=Km≈2.0。显然,金属丝材的应变电阻效应以结构尺寸变化为主。从结构尺寸看,栅长为5mm的丝式应变计比栅长为3mm的应变计在相同力的作用下,引起的电阻变化大。
2-5、现选用丝栅长10mm的应变计检测弹性模量E=2×1011N/m2、密度ρ=7.8g/cm3的钢构件承受谐振力作用下的应变,要求测量精度不低于0.5%。试确定构件的最大应变频率限。
答:机械应变波是以相同于声波的形式和速度在材料中传播的。当它依次通过一定厚度的基底、胶层(两者都很薄,可忽略不计)和栅长 而为应变计所响应时,就会有时间的迟后。应变计的这种响应迟后对动态(高频)应变测量,尤会产生误差。由
而为应变计所响应时,就会有时间的迟后。应变计的这种响应迟后对动态(高频)应变测量,尤会产生误差。由 式中
式中 为声波在钢构件中传播的速度;
为声波在钢构件中传播的速度;
又知道声波在该钢构件中的传播速度为:
 ;
;
 ;
;
可算得 。
。
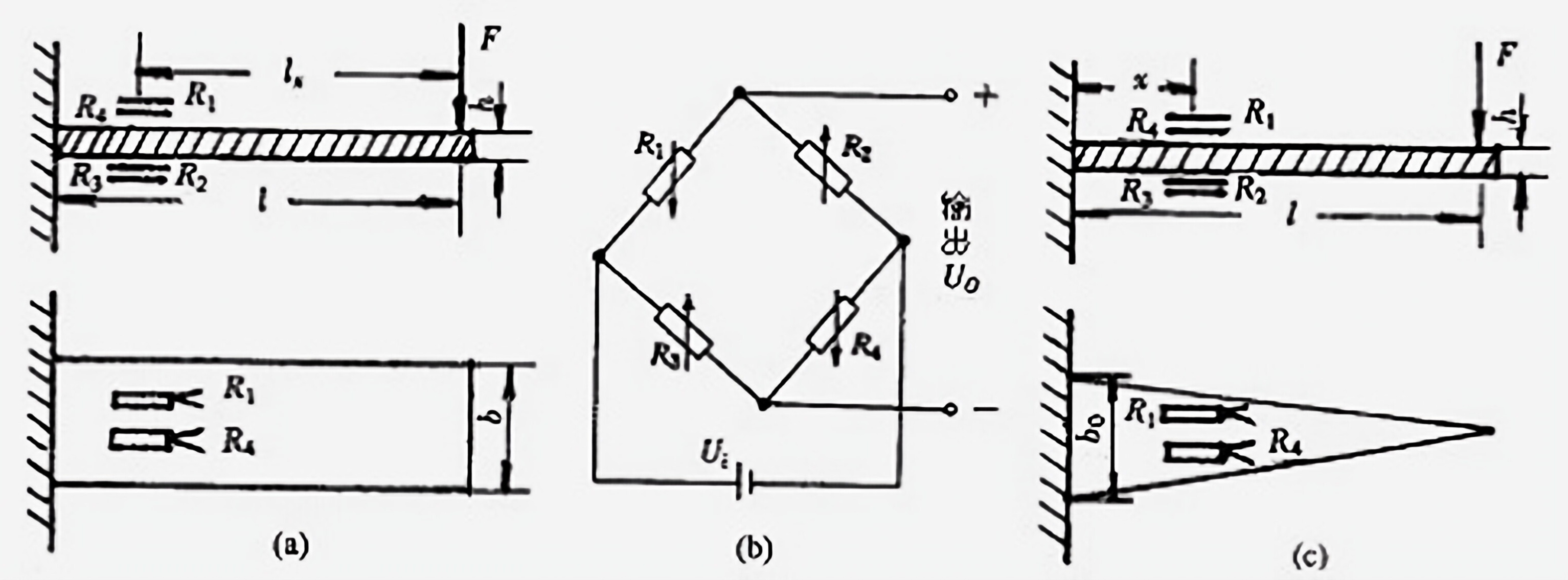
2-6、为什么常用等强度悬臂梁作为应变式传感器的力敏元件? 现用一等强度梁:有效长=150mm,固支处宽b=18mm,厚h=5mm,弹性模量E=2×105N/mm2,贴上4片等阻值、K=2的电阻应变计,并接入四等臂差动电桥构成称重传感器。试问: 1)悬臂梁上如何布片?又如何接桥?为什么?
2)当输入电压为3V,有输出电压为2mV时的称重量为多少?
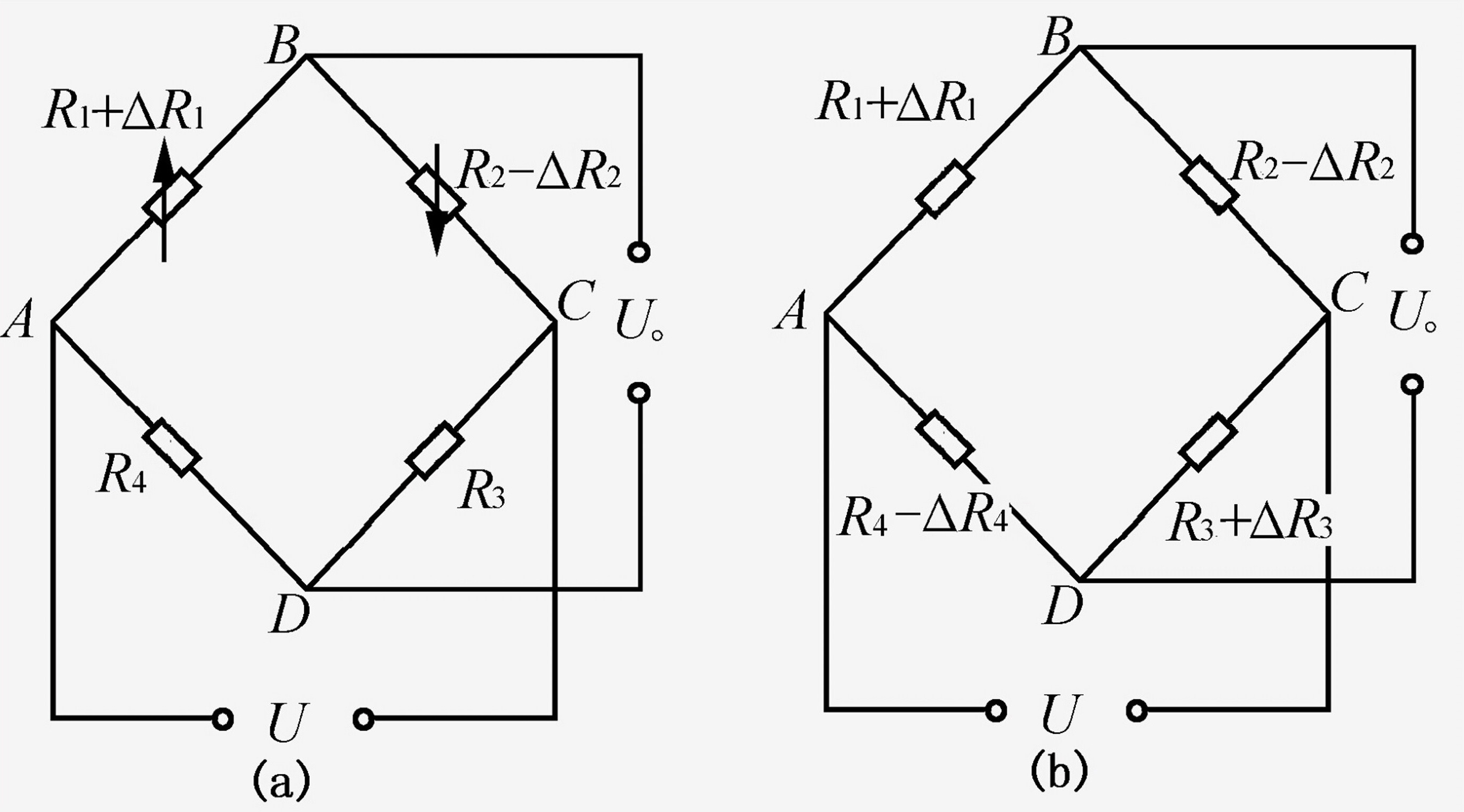
答:当力F作用在弹性臂梁自由端时,悬臂梁产生变形,在梁的上、下表面对称位置上应变大小相当,极性相反,若分别粘贴应变片R1 、R4 和R2 、R3 ,并接成差动电桥,则电桥输出电压Uo与力F成正比。等强度悬臂梁的应变 不随应变片粘贴位置变化。
不随应变片粘贴位置变化。
1)、悬臂梁上布片如图2-20a所示。接桥方式如图2-20b所示。这样当梁上受力时,R1、R4受拉伸力作用,阻值增大,R2、R3受压,阻值减小,使差动输出电压成倍变化。可提高灵敏度。
2)、当输入电压为3V,有输出电压为2mV时的称重量为:
计算如下:
由公式: 代入各参数算F=33.3N;
代入各参数算F=33.3N;
1牛顿=0.102千克力;所以,F=3.4Kg。此处注意:F=m*g;即力=质量*重力加速度;1N=1Kg*9.8m/s2.力的单位是牛顿(N)和质量的单位是Kg;所以称得的重量应该是3.4Kg。
;
2-7、何谓压阻效应?扩散硅压阻式传感器与贴片型电阻应变式传感器相比有什么优点,有什么缺点?如何克服?
答:“压阻效应”是指半导体材料(锗和硅)的电阻率随作用应力的变化而变化的现象。
优点是尺寸、横向效应、机械滞后都很小,灵敏系数极大,因而输出也大,可以不需放大器直接与记录仪器连接,使得测量系统简化。
缺点是电阻值和灵敏系数随温度稳定性差,测量较大应变时非线性严重;灵敏系数随受拉或压而变,且分散度大,一般在(3-5)%之间,因而使得测量结果有(±3-5)%的误差。
压阻式传感器广泛采用全等臂差动桥路来提高输出灵敏度,又部分地消除阻值随温度而变化的影响。
2-8 、一应变片的电阻R=120Ω,k=2.05,用作应变片为800μm/m的传感元件。
A. 求ΔR/R和ΔR;B. U=3V,惠斯登电桥初始平衡,求输出电压U。
C. 答:
 此处
此处 =800μm/m;所以
=800μm/m;所以 ;
;D.
 ;
;E. 全桥电路连接时,输出电压可按下式计算:
F. R2/R1,为桥臂比;此处取四个电阻相等,所以n=1;算得U=4.92mV。
G. R1和R2,把这两片应变片接入差动电桥(如图2-19),若钢的泊松系数μ=0.285,应变片的灵敏度系数k=2,电桥电源电压U=2V,当试件受轴向拉伸时,测得应变片的电阻变化ΔR1=0.48 Ω,求电桥的输出电压U为多少?

半桥电路
答:由
 轴向应变引起的电阻变化;可求的轴向应变系数
轴向应变引起的电阻变化;可求的轴向应变系数 ;总的应变系数
;总的应变系数 ;
;又
U0=2.567mV。
4-1 有一只变极距电容传感元件,两极板重叠有效面积为8×10-4m2,两极板间的距离为1mm,已知空气的相对介电常数是1.0006,试计算该传感器的位移灵敏度。
答:由变极距型电容传感器知识可知,其位移灵敏度
 ,
,由已知条件可知
 ,代入数据可以求得:
,代入数据可以求得: 。
。4-2 简述电容式传感器的工作原理
S、
 或
或 发生变化时,电容量C也随之变化。如果保持其中两个参数不变,而仅改变其中一个参数,就可把该参数的变化转换为电容量的变化
发生变化时,电容量C也随之变化。如果保持其中两个参数不变,而仅改变其中一个参数,就可把该参数的变化转换为电容量的变化 ,这就组成了电容式传感器。
,这就组成了电容式传感器。4-5 采用运算放大器作为电容传感器的测量电路,其输出特性是否为线性?为什么?
答:采用运算放大器作为电容传感器的测量电路时,其输出/输入特性关系为:
 。
。Zi及放大倍数足够大。同时,为保证仪器精度,还要求电源电压的幅值和固定电容C值稳定。
6-4 什么是霍尔效应?霍尔电势与哪些因素有关?
答:置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,载流导体上平行于电流和磁场方向上的两个面之间产生电动势,这种现象称霍尔效应。
霍尔器件工作产生的霍尔电势为
 ,由表达式可知,霍尔电势
,由表达式可知,霍尔电势 正比于激励电流
正比于激励电流 及磁感应强度
及磁感应强度 ,其灵敏度
,其灵敏度 与霍尔系数
与霍尔系数 成正比,而与霍尔片厚度
成正比,而与霍尔片厚度 成反比。
成反比。6-5 影响霍尔元件输出零点的因素有哪些?怎样补偿?
答:影响霍尔元件输出零点的因素主要是霍尔元件的初始位置。
霍尔位移传感器,是由一块永久磁铁组成磁路的传感器,在霍尔元件处于初始位置
 时,霍尔电势
时,霍尔电势 不等于零。霍尔式位移传感器为了获得较好的线性分布,在磁极端面装有极靴,霍尔元件调整好初始位置时,可以使霍尔电势
不等于零。霍尔式位移传感器为了获得较好的线性分布,在磁极端面装有极靴,霍尔元件调整好初始位置时,可以使霍尔电势 =0。
=0。6-6 温度变化对霍尔元件输出电势有什么影响?如何补偿?
T倍。
补偿温度变化对霍尔电势的影响,通常采用一种恒流源补偿电路。基本思想是:在温度增加的同时,让激励电流
 相应地减小,并能保持乘积不变,也就可以相对抵消温度对灵敏系数
相应地减小,并能保持乘积不变,也就可以相对抵消温度对灵敏系数 增加的影响,从而抵消对霍尔电势的影响。
增加的影响,从而抵消对霍尔电势的影响。 7-1在炼钢厂中,有时直接将廉价热电极(易耗 品,例如镍铬、镍硅热偶丝,时间稍长即熔化)插入钢水中测量钢水温度,如图 7-27所示。试说明测量钢水温度的基本原理?为什么不必将工作端焊在一起? 要满足哪些条件才不影响测量精度?采用上述方法是利用了热电偶的什么定律?如果被测物不是钢水,而是熔化的塑料行吗?为什么?
7-1在炼钢厂中,有时直接将廉价热电极(易耗 品,例如镍铬、镍硅热偶丝,时间稍长即熔化)插入钢水中测量钢水温度,如图 7-27所示。试说明测量钢水温度的基本原理?为什么不必将工作端焊在一起? 要满足哪些条件才不影响测量精度?采用上述方法是利用了热电偶的什么定律?如果被测物不是钢水,而是熔化的塑料行吗?为什么?答:测量钢水温度的基本原理是利用了热电效应;因为钢水是导体,又处在同一个温度下,把钢水看作是第三导体接入,利用了热电偶的导体接入定律;如果被测物不是钢水,而是熔化的塑料不行,因为,塑料不导电,不能形成热电势。
(K)热电偶测温度,已知冷端温度
 为40℃,用高精度毫伏表测得这时的热电势为29.186mV ,求被测点温度?
为40℃,用高精度毫伏表测得这时的热电势为29.186mV ,求被测点温度?K分度表,热电偶在40℃时相对于0℃的热电势为:1.6118mV;
由公式:
V=30.798mV;
K分度表得被测点温度值为:740℃。
XCT-101 型动圈仪表组成的热电偶测温、控温电路。请正确连线。
V交流电从接线排引入,经过交流接触器,到退火电炉主加热回路。
V单相电给控制盒,获得低压直流电,给检测回路供电;热电偶接入控制盒输入端,经内部处理电路,控制直流继电器线圈,用直流继电器的常开触点控制交流接触器的线圈电压。L1火线经过交流接触器的线圈一端,线圈另一端接直流继电器的常开触电端,直流继电器的公共端接交流电的零线。使得当直流继电器吸合时,交流接触器线圈得点,吸合。
题目解答
答案
答: 此处 =800 μ m/m ;所以 ; ; 全桥电路连接时,输出电压可按下式计算: 式中 n = R 2 / R 1 ,为桥臂比;此处取四个电阻相等,所以 n=1 ;算得 U 0 =4.92mV 。 (如图 2-19 ) 答:由 轴向应变引起的电阻变化;可求的轴向应变系数 ; 总的应变系数 ; 又 或:也可以根据分压定律来做。得 U0=2.567mV 。 答:由变极距型电容传感器知识可知,其位移灵敏度 , 由已知条件可知 ,代入数据可以求得: 。 答: 有物理知识可知,物体间的电容量 ,电容式传感器的基本原理就是基于物体间的电容量与其结构参数之间的关系来实现。也即当被测参数变化使得上式中的 S 、 或 发生变化时,电容量 C 也随之变化。如果保持其中两个参数不变,而仅改变其中一个参数,就可把该参数的变化转换为电容量的变化 ,这就组成了电容式传感器。 答:采用运算放大器作为电容传感器的测量电路时,其输出 / 输入特性关系为: 。 可见运算放大器的输出电压与极板间距离 成线性关系。因此,运算放大器式电路解决了单个变极板间距离式电容传感器的非线性问题。但要求输入阻抗 Zi 及放大倍数足够大。同时,为保证仪器精度,还要求电源电压的幅值和固定电容 C 值稳定。 答:置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,载流导体上平行于电流和磁场方向上的两个面之间产生电动势,这种现象称霍尔效应。 霍尔器件工作产生的霍尔电势为 ,由表达式可知,霍尔电势 正比于激励电流 及磁感应强度 ,其灵敏度 与霍尔系数 成正比,而与霍尔片厚度 成反比。 答:影响霍尔元件输出零点的因素主要是霍尔元件的初始位置。 霍尔位移传感器,是由一块永久磁铁组成磁路的传感器,在霍尔元件处于初始位置 时,霍尔电势 不等于零。霍尔式位移传感器为了获得较好的线性分布,在磁极端面装有极靴,霍尔元件调整好初始位置时,可以使霍尔电势 = 0 。 答:霍尔元件的灵敏系数 是温度的函数,关系式为: ,大多数霍尔元件的温度系数 是正值,因此,它们的霍尔电势也将随温度升高而增加αΔ T 倍。 答:测量钢水温度的基本原理是利用了热电效应;因为钢水是导体,又处在同一个温度下,把钢水看作是第三导体接入,利用了热电偶的导体接入定律;如果被测物不是钢水,而是熔化的塑料不行,因为,塑料不导电,不能形成热电势。 答:查 K 分度表,热电偶在 40 ℃时相对于 0 ℃的热电势为: 1.6118mV; 由公式: =29.186+1.6118mV=30.798mV; 查 K 分度表得被测点温度值为: 740 答:主回路: 380V 交流电从接线排引入,经过交流接触器,到退火电炉主加热回路。 检测回路:取 220V 单相电给控制盒,获得低压直流电,给检测回路供电;热电偶接入控制盒输入端,经内部处理电路,控制直流继电器线圈,用直流继电器的常开触点控制交流接触器的线圈电压。 L1 火线经过交流接触器的线圈一端,线圈另一端接直流继电器的常开触电端,直流继电器的公共端接交流电的零线。使得当直流继电器吸合时,交流接触器线圈得点,吸合。