题目
第8章作业8-l 铰链四杆机构中,转动副成为周转副的条件是什么?在下图所示四杆机构ABCD中哪些运动副为周转副?当其杆AB与AD重合时,该机构在运动上有何特点?并用作图法求出杆3上E点的连杆[1]曲线。答:转动副成为周转副的条件是:(1)最短杆与最长杆的长度之和小于或等于其他两杆长度之和;(2)机构中最短杆上的两个转动副均为周转副。图示ABCD四杆机构中C、D为周转副。当其杆AB与AD重合时,杆BE与CD也重合因此机构处于死点[2]位置。8-2曲柄[3]摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,且一定无死点?为什么?答:机构不一定存在急回运动,但一定无死点,因为:(1)当极位夹角等于零时,就不存在急回运动如图所示,(2)原动件能做连续回转[4]运动,所以一定无死点。8-3 四杆机构中的极位和死点有何异同?8-4图a为偏心轮式容积泵;图b为由四个四杆机构组成的转动翼板式容积泵。试绘出两种泵的机构运动简图,并说明它们为何种四杆机构,为什么?解 机构运动简图如右图所示,ABCD是双曲柄机构。因为主动圆盘AB绕固定轴A作整周转动,而各翼板CD绕固定轴D转动,所以A、D为周转副,杆AB、CD都是曲柄。8-5试画出图示两种机构的机构运动简图,并说明它们各为何种机构。图a曲柄摇杆机构图b为导杆机构。8-6如图所示,设己知四杆机构各构件的长度为a=240mm,a=240mma=240mm,a=240mm。试问:1)当取杆4为机架时,是否有曲柄存在?2)若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?3)若a、b﹑c三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d的取值范围为何值? : a=240mm解 (1)因a+b=240+600=840≤900=400+500=c+d且最短杆 1为连架轩.故当取杆4为机架时,有曲柄存在。(2)、能。要使此此机构成为双曲柄机构,则应取1杆为机架;两使此机构成为双摇杆机构,则应取杆3为机架。(3)要获得曲柄摇杆机构, d的取值范围应为440~760mm。8-7图示为一偏置曲柄滑块机构,试求杆AB为曲柄的条件。若偏距e=0,则杆AB为曲柄的条件是什么?解 (1)如果杆AB能通过其垂直于滑块导路的两位置时,则转动副A为周转副,故杆AB为曲柄的条件是AB+e≤BC。(2)若偏距e=0, 则杆AB为曲柄的条件是AB≤BC8-8 在图所示的铰链四杆机构中,各杆的长度为a=240mma=240mm,a=240mma=240mm, a=240mma=240mm,a=240mma=240mm,试求:1)当取杆4为机架时,该机构的极位夹角a=240mm、杆3的最大摆角a=240mm、最小传动角a=240mm和行程速比系数K;2)当取杆1为机架时,将演化成何种类型的机构?为什么?并说明这时C、D两个转动副是周转副还是摆转副;3)当取杆3为机架时,又将演化成何种机构?这时A、B两个转动副是否仍为周转副?解 (1)怍出机构的两个极位,如图, 并由图中量得:θ=,φ=, γmin= o(2)①由l1+l4 ≤l2+l3可知图示铰链四杆机构各杆长度符合杆长条件;小②最短杆l为机架时,该机构将演化成双曲柄机构;③最短杆1参与构成的转动副A、B都是周转副而C、D为摆转副;(3)当取杆3为机架时,最短杆变为连杆,又将演化成双摇杆机构,此时A、B仍为周转副。8-9 在图示的连杆机构中,已知各构件的尺寸为a=240mma=240mma=240mma=240mma=240mm构件AB为原动件,沿顺时针方向匀速回转,试确定:1)四杆机构ABCD的类型;2)该四杆机构的最小传动角a=240mm;3)滑块F的行程速比系数K。解 (1)由lAD+lBCAB+lCD且最短杆AD为机架可知,图中四杆ABCD为双曲柄机构;(2)作出四杆机构ABCD传动角最小时的位置。见图并量得γmin=12o(3)作出滑块F的上、下两个极位及原动件AB与之对应的两个极位,并量得θ=47o。求出滑块F的行程速比系数为8-10试说明对心曲柄滑块机构当以曲柄为主动件时,其传动角在何处最大?何处最小?解 在曲柄与导轨共线的两位置之一传动角最大,γmax=90 o;在曲柄与机架共线的两位置之一传动角最小,γmin=arcos(LAB/lBC)。8-11正弦机构(图8一15b)和导杆机构(图8—22a)中,当以曲柄为主动件时,最小传动角γmin为多少?传动角按什么规律变化?解 γmin=90o;传动角恒定不变。8-12图示为偏置导杆机构,试作出其在图示位置时的传动角以及机构的最小传动角及其出现的位置,并确定机构为回转导杆机构的条件。解 传动角以及机构最小传动角及其出现的位置如下图所示。机构为回转导杆机构的条件: AB≤AC8-13如图8—57所示,当按给定的行程速度变化系数K设计曲柄摇杆机构时,试证明若将固定铰链A的中心取在FG弧段上将不满足运动连续性要求。答 因这时机构的两极位DC1, DC2将分别在两个不连通的可行域内。8-14图示为一实验用小电炉的炉门装置,关闭时为位置E1,开启时为位置E2。试设计一个四杆机构来操作炉门的启闭(各有关尺寸见图)。(开启时,炉门应向外开启,炉门与炉体不得发生干涉。而关闭时,炉门应有一个自动压向炉体的趋势(图中S为炉门质心位置)。B、C为两活动铰链所在位置。解 (1)作出B2C2的位置;用作图法求出A及D的位置,并作出机构在E2位置的运动简图,见下图,并从图中量得lAB==μ=95 mmlAD=μ =335mmlCD=μ=290mm(2)用怍图法在炉门上求得B及C点位置,并作出机构在位置的运动图(保留作图线)。作图时将位置E1转至位置E2,见图并量得lAB=μ= mmlBC=μlBC=l rnmlCD=μ= mn8-15 图示为公共汽车车门启闭机构。已知车门上铰链C沿水平直线移动,铰链B绕固定铰链A转动,车门关闭位置与开启位置夹角为a=115 o,AB1a=240mma=240mma=240mma=240mma=240mma=240mm2F30 mma=240mma=240mma=240mma=240mma=240mma=240mm图可得两个解:(1) lAB=μl. (AC2-AC1)/2 =, lBC=μl. (AC2+AC1)/2=(2) lAB=μl. (AC1-AC2)/2 =22mm, lBC=μl. (AC2+AC1)/2=48mm8-24如图所示,设已知破碎机的行程速度变化系数K=,颚板长度lCD=300 mm颚板摆角φ=35o,曲柄长度lAD=80 mm。求连杆的长度,并验算最小传动角γmin是否在允许的范围内。
第8章作业
8-l 铰链四杆机构中,转动副成为周转副的条件是什么?在下图所示四杆机构ABCD中哪些运动副为周转副?当其杆AB与AD重合时,该机构在运动上有何特点?并用作图法求出杆3上E点的连杆[1]曲线。
答:转动副成为周转副的条件是:
(1)最短杆与最长杆的长度之和小于或等于其他两杆长度之和;
(2)机构中最短杆上的两个转动副均为周转副。图示ABCD四杆机构中C、D为周转副。
当其杆AB与AD重合时,杆BE与CD也重合因此机构处于死点[2]位置。
8-2曲柄[3]摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,且一定无死点?为什么?
答:机构不一定存在急回运动,但一定无死点,因为:
(1)当极位夹角等于零时,就不存在急回运动如图所示,
(2)原动件能做连续回转[4]运动,所以一定无死点。
8-3 四杆机构中的极位和死点有何异同?
8-4图a为偏心轮式容积泵;图b为由四个四杆机构组成的转动翼板式容积泵。试绘出两种泵的机构运动简图,并说明它们为何种四杆机构,为什么?
解 机构运动简图如右图所示,ABCD是双曲柄机构。
因为主动圆盘AB绕固定轴A作整周转动,而各翼板CD绕固定轴D转动,所以A、D为周转副,杆AB、CD都是曲柄。
8-5试画出图示两种机构的机构运动简图,并说明它们各为何种机构。
图a曲柄摇杆机构
图b为导杆机构。
8-6如图所示,设己知四杆机构各构件的长度为 ,
,
 ,
, 。试问:
。试问:
,,。试问:1)当取杆4为机架时,是否有曲柄存在?
2)若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?
3)若a、b﹑c三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d的取值范围为何值? : 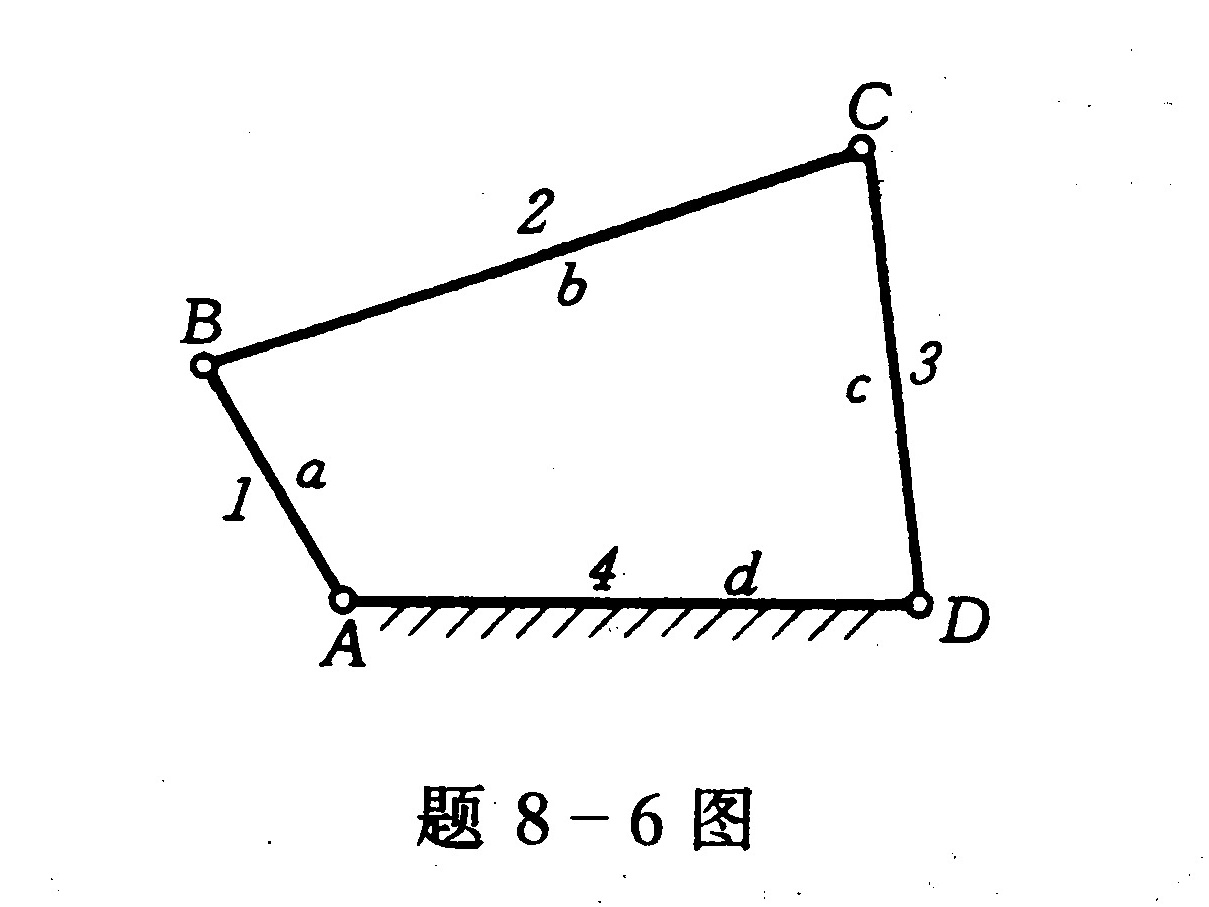
解 (1)因a+b=240+600=840≤900=400+500=c+d且最短杆 1为连架轩.故当取杆4为机架时,有曲柄存在。
(2)、能。要使此此机构成为双曲柄机构,则应取1杆为机架;两使此机构成为双摇杆机构,则应取杆3为机架。
(3)要获得曲柄摇杆机构, d的取值范围应为440~760mm。
8-7图示为一偏置曲柄滑块机构,试求杆AB为曲柄的条件。若偏距e=0,则杆AB为曲柄的条件是什么?
解 (1)如果杆AB能通过其垂直于滑块导路的两位置时,则转动副A为周转副,故杆AB为曲柄的条件是AB+e≤BC。
(2)若偏距e=0, 则杆AB为曲柄的条件是AB≤BC
8-8 在图所示的铰链四杆机构中,各杆的长度为
 ,
,
 ,
, 
 ,
,
 ,试求:
,试求:
,, ,,试求:1)当取杆4为机架时,该机构的极位夹角 、杆3的最大摆角
、杆3的最大摆角 、最小传动角
、最小传动角 和行程速比系数K;
和行程速比系数K;
、杆3的最大摆角、最小传动角和行程速比系数K;2)当取杆1为机架时,将演化成何种类型的机构?为什么?并说明这时C、D两个转动副是周转副还是摆转副;
3)当取杆3为机架时,又将演化成何种机构?这时A、B两个转动副是否仍为周转副?
解 (1)怍出机构的两个极位,如图, 并由图中量得:
θ=,φ=, γmin= o
(2)①由l1+l4 ≤l2+l3可知图示铰链四杆机构各杆长度符合杆长条件;小②最短杆l为机架时,该机构将演化成双曲柄机构;③最短杆1参与构成的转动副A、B都是周转副而C、D为摆转副;
(3)当取杆3为机架时,最短杆变为连杆,又将演化成双摇杆机构,此时A、B仍为周转副。
8-9 在图示的连杆机构中,已知各构件的尺寸为


 构件AB为原动件,沿顺时针方向匀速回转,试确定:
构件AB为原动件,沿顺时针方向匀速回转,试确定:1)四杆机构ABCD的类型;
2)该四杆机构的最小传动角;
;3)滑块F的行程速比系数K。
解 (1)由lAD+lBC
(2)作出四杆机构ABCD传动角最小时的位置。见图并量得γmin=12o
(3)作出滑块F的上、下两个极位及原动件AB与之对应的两个极位,并量得θ=47o。求出滑块F的行程速比系数为
8-10试说明对心曲柄滑块机构当以曲柄为主动件时,其传动角在何处最大?何处最小?
解 在曲柄与导轨共线的两位置之一传动角最大,γmax=90 o;
在曲柄与机架共线的两位置之一传动角最小,γmin=arcos(LAB/lBC)。
8-11正弦机构(图8一15b)和导杆机构(图8—22a)中,当以曲柄为主动件时,最小传动角γmin为多少?传动角按什么规律变化?
解 γmin=90o;
传动角恒定不变。
8-12图示为偏置导杆机构,试作出其在图示位置时的传动角以及机构的最小传动角及其出现的位置,并确定机构为回转导杆机构的条件。
解 传动角以及机构最小传动角及其出现的位置如下图所示。机构为
回转导杆机构的条件: AB≤AC
8-13如图8—57所示,当按给定的行程速度变化系数K设计曲柄摇杆机构时,试证明若将固定铰链A的中心取在FG弧段上将不满足运动连续性要求。
答 因这时机构的两极位DC1, DC2将分别在两个不连通的可行域内。
8-14图示为一实验用小电炉的炉门装置,关闭时为位置E1,开启时为位置E2。试设计一个四杆机构来操作炉门的启闭(各有关尺寸见图)。(开启时,炉门应向外开启,炉门与炉体不得发生干涉。而关闭时,炉门应有一个自动压向炉体的趋势(图中S为炉门质心位置)。B、C为两活动铰链所在位置。
解 (1)作出B2C2的位置;用作图法求出A及D的位置,并作出机构在E2位置的运动简图,见下图,并从图中量得
lAB==μ=95 mm
lAD=μ =335mm
lCD=μ=290mm
(2)用怍图法在炉门上求得B及C点位置,并作出机构在位置的运动图(保留作图线)。作图时将位置E1转至位置E2,见图并量得
lAB=μ= mm
lBC=μlBC=l rnm
lCD=μ= mn
8-15 图示为公共汽车车门启闭机构。已知车门上铰链C沿水平直线移动,铰链B绕固定铰链A转动,车门关闭位置与开启位置夹角为a=115 o,AB1
 2F30 mm
2F30 mm
 图可得两个解:
图可得两个解:
2F30 mm图可得两个解:(1) lAB=μl. (AC2-AC1)/2 =, lBC=μl. (AC2+AC1)/2=
(2) lAB=μl. (AC1-AC2)/2 =22mm, lBC=μl. (AC2+AC1)/2=48mm
8-24如图所示,设已知破碎机的行程速度变化系数K=,颚板长度lCD=300 mm颚板摆角φ=35o,曲柄长度lAD=80 mm。求连杆的长度,并验算最小传动角γmin是否在允许的范围内。
题目解答
答案
解:先计算
取相应比例尺μl作出摇杆CD的两极限位置C1D及C2D和固定铰链A所
在圆s1(保留作图线)。 -
如图所示,以C2为圆心、2AB为半径作圆,同时以F为圆心2FC2为半径作圆,两圆交于点E,作C2E的延长线与圆s1的交点,即为铰链A的位置。
由图知: lBC=μl. AC1+lAB=310mm
γmin=γ``=45o>40o
2、AB=75 mm,lDE=100 mm,行程速度变化系数K=2,刨头5的行程H=300 mm。要求在整个行程中,推动刨头5有较小的压力角,试设计此机构。
解 先算导杆的摆角
取相应比例尺μl作图,由图可得导杆机构导杆和机架的长度为:
LCD=μ=300mm, lAC=μ=150mm;
导杆端点D的行程 D1D2=E1E2=H/μl
为了使推动刨头5在整行程中有较小压力角,刨头导路的位置h成为
H=lCD(1+cos(φ/2))/2=300[(1+cos(60/2))/2=
点津 本题属于按行程速比系数K设计四杆机构问题,需要注意的是:①导杆CD的最大摆角与机构极位夹角相等:②因H=300mm,且要求在整个行中刨头运动压力角较小。所以取CD1=CD2=300mm, 则D1D2=H=300mm。
2、1经图示中间位置输送到传送带C2上。给定工件的三个方位为:M1(204,-30),θ21=0o;M2(144,80),θ22=22 o;M3(34,100),θ23=68 o。初步预选两个固定铰链的位置为A(0,0)、D(34,一83)。试用解析法设计此四杆机构。
解 由题可知, 本题属于按预定的连杆位置用解析法设汁四杆机构问题,
N=3,并已预选xA, yA和xD, yD坐标值,具体计算过程略。
2、 ,
, ,
, ,
, ,
,
 ,
, 。试以解析法设计此四杆机构。
。试以解析法设计此四杆机构。
,,,,,。试以解析法设计此四杆机构。解:(1)将α, φ 的三组对应值带入式(8-17)(初选α=φ=0)
Cos(α+α)=pcos(φ+φ)+p1cos[(φ+φ)-(α+α)]+p2
得 
解之得(计算到小数点后四位)p=, p1=, p2=
(2)如图所示,求各杆的相对长度,得n=c/a=p=, l=-n/p=
(3)求各杆的长度:得d=
a=d/l=80/=
b=ma=ⅹ=
c=na=ⅹ=
2、max。
解:计算并取相应比例尺μl根据滑块的行程H作出极位及作θ圆,作偏距线,两者的交点即铰链所在的位置,由图可得:
并取相应比例尺μl根据滑块的行程H作出极位及作θ圆,作偏距线,两者的交点即铰链所在的位置,由图可得:lAB=μl. (AC2-AC1)/2 =17mm, lBC=μl. (AC2+AC1)/2=36mm
2、
3、
1)从动件摇杆输出角为45o:
2)从动件滑块输出行程为5倍曲柄长度。
3、
1)结合自己身边学习和生活的需要,设计一折叠式床头小桌或晾衣架,或一收藏式床头书架或脸盆架或电脑架等;
2)设计一能帮助截瘫病人独自从轮椅转入床上或四肢瘫痪已失去活动能力的病人能自理用餐或自动翻书进行阅读的机械;
3)设计适合老、中、青不同年龄段使用并针对不同职业活动性质(如坐办公室人员运动少的特点)的健身机械;
4)设计帮助运动员网球或乒乓球训练的标准发球机或步兵步行耐力训练,或空军飞行员体验混战演习训练(即给可能的飞行员各方位加一个重力),或宇航员失重训练(即能运载一人并提供一个重力加速度)的模拟训练机械;
5)设计放置在超市外投币式的具有安全、有趣或难以想像的运动的小孩“坐椅”或能使两位、四位游客产生毛骨悚然的颤动感觉的轻便“急动”坐车。