人体尺度在设计中的应用确定设计对象的类型和适用度;根据适用度选择百分位(特殊设计其适用度另行规定);根据设计裕度确定功能修正量(参照课本表2-12),为了心理感受,可以根据实验确定心理修正量;确定产品的功能尺寸。产品的最小功能尺寸 Smin=Sα+△f产品的最佳功能尺寸 Sopm=Sα+△f +△p例2:设计适用于中国人的车船卧铺上下铺净空高度
人体尺度在设计中的应用
 确定设计对象的类型和适用度;
确定设计对象的类型和适用度;
 根据适用度选择百分位(特殊设计其适用度另行规定);
根据适用度选择百分位(特殊设计其适用度另行规定);
 根据设计裕度确定功能修正量(参照课本表2-12),为了心理感受,可以根据实验确定心理修正量;
根据设计裕度确定功能修正量(参照课本表2-12),为了心理感受,可以根据实验确定心理修正量;
 确定产品的功能尺寸。
确定产品的功能尺寸。
产品的最小功能尺寸 Smin=Sα+△f
产品的最佳功能尺寸 Sopm=Sα+△f +△p
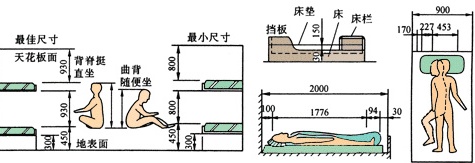
例2:设计适用于中国人的车船卧铺上下铺净空高度
题目解答
答案
解:车船卧铺上下铺净空高度属于最大型设计,如果适用度为99%,则应该选第99百分位坐高参数。根据公式得:
X99=908+2.326X30.30=978.5mm;
考虑衣裤厚度,功能修正量取25mm;所以最小功能尺寸:
Xmin=Xα+△f=978.5+25=1003.5mm
考虑人头部无压迫感,心理修正量取115mm;最佳功能尺寸:
Xopm=Xα+△f +△p=1118.5mm
例3:设计适用于中国男人的固定座椅面高。
设计原则:
 适当的座高应使大腿保持水平,小腿垂直,双脚平放于地面。
适当的座高应使大腿保持水平,小腿垂直,双脚平放于地面。
 座面过高则小腿悬空时,大腿受椅面前缘压迫,使坐者感到不适,长时间这样坐血液循环受阻,小腿麻木肿胀。因此,固定座高一般按低身材人群设计。
座面过高则小腿悬空时,大腿受椅面前缘压迫,使坐者感到不适,长时间这样坐血液循环受阻,小腿麻木肿胀。因此,固定座高一般按低身材人群设计。
 座面太低则骨盆后倾,正常的腰椎曲线被拉直,致使腰酸不适。
座面太低则骨盆后倾,正常的腰椎曲线被拉直,致使腰酸不适。
解:固定座椅面高属于最小型设计,如果适用度为95%,则应该选第5百分位参数,查表得小腿加足高S5=383mm;
考虑鞋厚等因素,功能修正量可以取28mm;所以最小功能尺寸
Xmin=Xα+△f=383+28=411mm
例4:某公司欲制造一批可调节扶手椅在美国销售,假设使用者全都是成年男性,试求出椅面的可调节范围尺寸(单位cm)。
解:设适用度为90%。
美国男性的平均身高为175.5cm,标准差为7.2,因此第5%的身高=175.5 —(7.2*1.645)= 163.656cm,第95%的身高=175.5 +(7.2*1.645)= 187.344cm
[方法1]根据“小腿加足高”计算公式S=0.249H ,美国男性第5%身高的坐平面高=0.249*163.7=40.8cm,第95%身高的坐平面高=0.249*187.3=46.6cm,可调节范围是40.8—46.6cm,约5cm。
[方法2]第5%身高的坐平面高=163.7*3/13=37.8cm,第95%身高的坐平面高=187.3*3/13=43.2cm,可调节范围是37.8—43.2cm,约5cm。