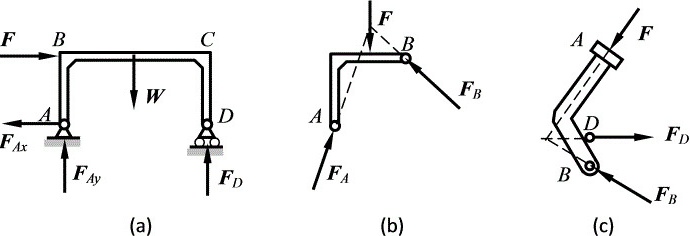
-1试画出以下各题中圆柱或圆盘的受力图。与其它物体接触处的摩擦力均略去。解:1-2 试画出以下各题中AB杆的受力图。解:1-3 试画出以下各题中AB梁的受力图。解:1-4 试画出以下各题中指定物体的受力图。(a) 拱ABCD;(b) 半拱AB部分;(c) 踏板AB;(d) 杠杆AB;(e) 方板ABCD;(f) 节点B。
题目解答
答案
解:
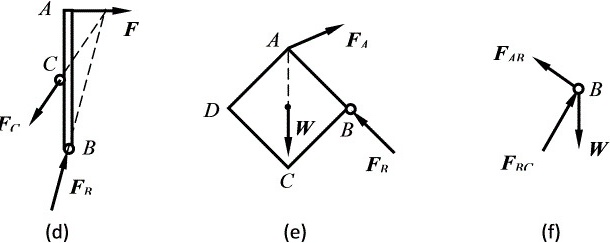
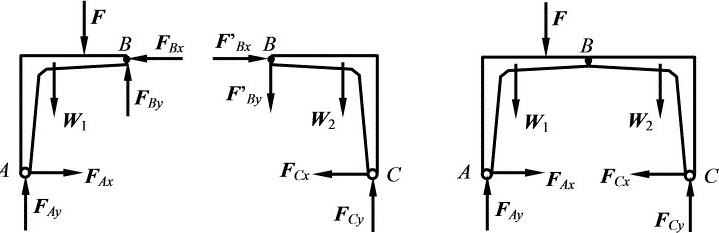
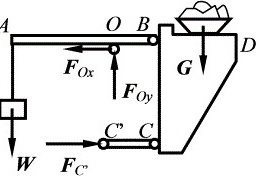
1-5 试画出以下各题中指定物体的受力图。
(a) 结点A,结点B;(b) 圆柱A和B及整体;(c) 半拱AB,半拱BC及整体;(d) 杠杆AB,切刀CEF及整体;(e) 秤杆AB,秤盘架BCD及整体。
解:(a)
(b)
(c)
(d)
(e)
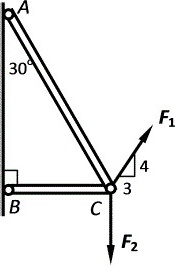
2-2 杆AC、BC在C处铰接,另一端均与墙面铰接,如图所示,F和F作用在销钉C上,F=445 N,F=535 N,不计杆重,试求两杆所受的力。
解:(1) 取节点C为研究对象,画受力图,注意AC、BC都为二力杆,

(2) 列平衡方程:
AC与BC两杆均受拉。
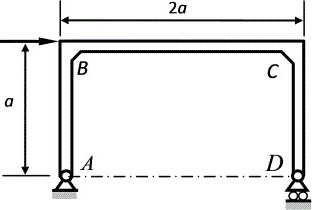
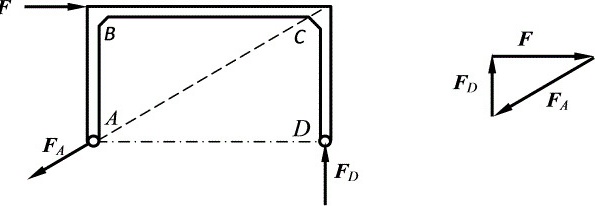
2-3 水平力F作用在刚架的B点,如图所示。如不计刚架重量,试求支座A和D 处的约束力。
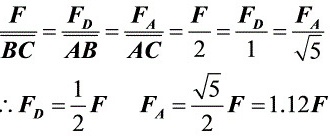
解:(1) 取整体ABCD为研究对象,受力分析如图,画封闭的力三角形:
(2) 由力三角形得
2-4 在简支梁AB的中点C作用一个倾斜45的力F,力的大小等于20KN,如图所示。若梁的自重不计,试求两支座的约束力。
解:(1) 研究AB,受力分析并画受力图:
(2) 画封闭的力三角形:
相似关系:
几何尺寸:
求出约束反力:
3-3 齿轮箱的两个轴上作用的力偶如题图所示,它们的力偶矩的大小分别为M=500 Nm,M =125 Nm。求两螺栓处的铅垂约束力。图中长度单位为cm。
解:(1) 取整体为研究对象,受力分析,A、B的约束力组成一个力偶,画受力图;
(2) 列平衡方程:
3-5 四连杆机构在图示位置平衡。已知OA=60cm,BC=40cm,作用BC上的力偶的力偶矩大小为M=1N.m,试求作用在OA上力偶的力偶矩大小M和AB所受的力F所受的力。各杆重量不计。
解:(1) 研究BC杆,受力分析,画受力图:
列平衡方程:
(2) 研究AB(二力杆),受力如图:
可知:
(3) 研究OA杆,受力分析,画受力图:
列平衡方程:
4-1 试求题4-1图所示各梁支座的约束力。设力的单位为kN,力偶矩的单位为kNm,长度单位为m,分布载荷集度为kN/m。(提示:计算非均布载荷的投影和与力矩和时需应用积分)。
解:
(e):(1) 研究CABD杆,受力分析,画出受力图(平面任意力系);
(2) 选坐标系Axy,列出平衡方程;
约束力的方向如图所示。
8-14 图示桁架,杆1与杆2的横截面均为圆形,直径分别为d=30 mm与d=20 mm,两杆材料相同,许用应力[σ]=160 MPa。该桁架在节点A处承受铅直方向的载荷F=80 kN作用,试校核桁架的强度。
解:(1) 对节点A受力分析,求出AB和AC两杆所受的力;
(2) 列平衡方程
解得:
(2) 分别对两杆进行强度计算;
所以桁架的强度足够。
8-15 图示桁架,杆1为圆截面钢杆,杆2为方截面木杆,在节点A处承受铅直方向的载荷F作用,试确定钢杆的直径d与木杆截面的边宽b。已知载荷F=50 kN,钢的许用应力[σ] =160 MPa,木的许用应力[σ] =10 MPa。
解:(1) 对节点A受力分析,求出AB和AC两杆所受的力;
(2) 运用强度条件,分别对两杆进行强度计算;
所以可以确定钢杆的直径为20 mm,木杆的边宽为84 mm。
(3) 综合轴的强度和刚度条件,确定轴的直径;
10-2.试建立图示各梁的剪力与弯矩方程,并画剪力与弯矩图。
解:
(d)
(1) 列剪力方程与弯矩方程

(2) 画剪力图与弯矩图
