题目
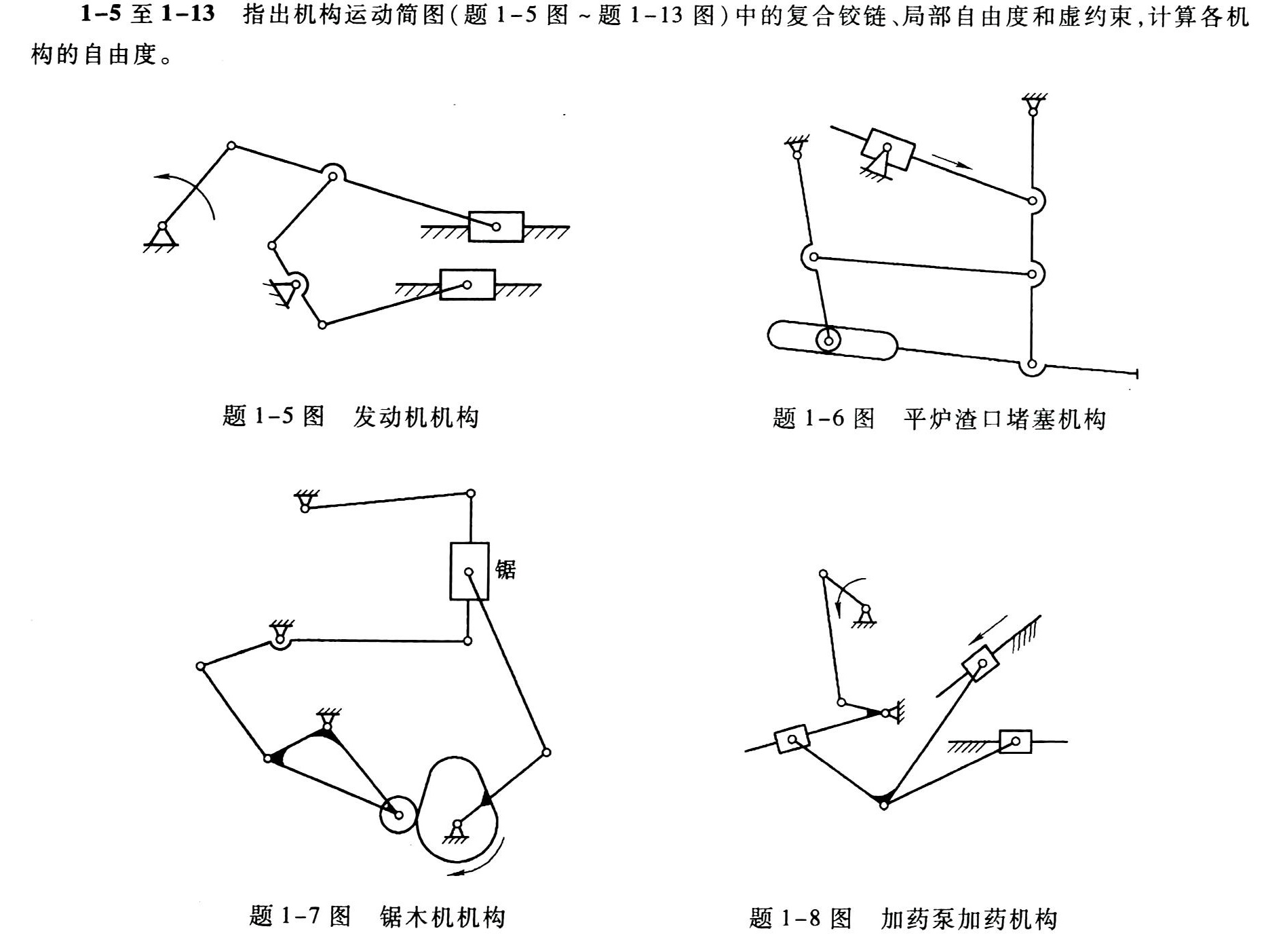
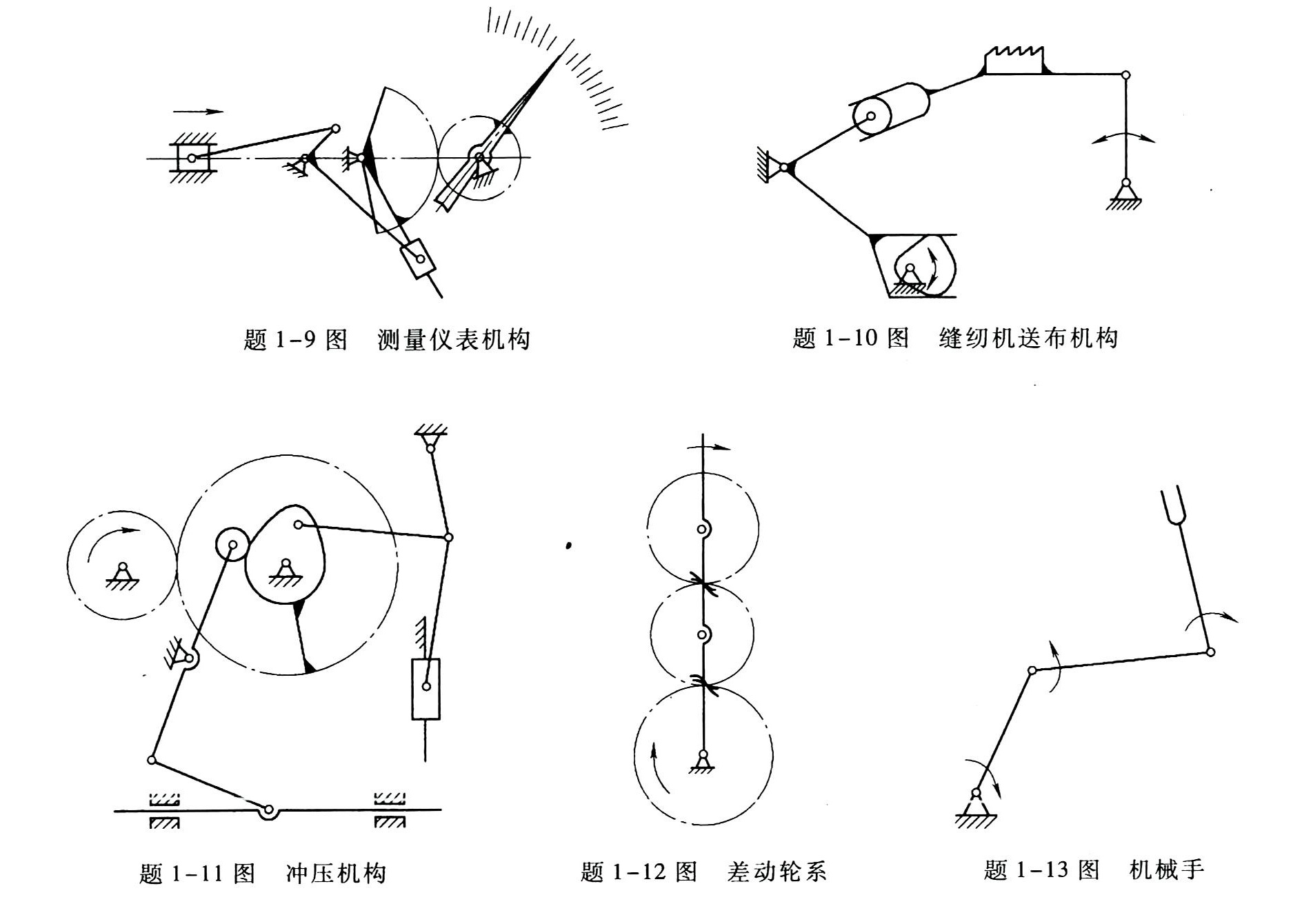
.1-5 至 1-13 指出机构运动简图(题 1-5 图~题 1-13 图)中的复合铰链、局部自由度和虚约束,计算各机-|||-构的自由度。-|||-777-|||-题 1-5 图 发动机机构 题 1-6 图 平炉渣口堵塞机构-|||-8 锯-|||-耸-|||-39-|||-题 1-7 图 锯木机机构 题 1-8 图 加药泵加药机构.1-5 至 1-13 指出机构运动简图(题 1-5 图~题 1-13 图)中的复合铰链、局部自由度和虚约束,计算各机-|||-构的自由度。-|||-777-|||-题 1-5 图 发动机机构 题 1-6 图 平炉渣口堵塞机构-|||-8 锯-|||-耸-|||-39-|||-题 1-7 图 锯木机机构 题 1-8 图 加药泵加药机构
题目解答
答案
解析
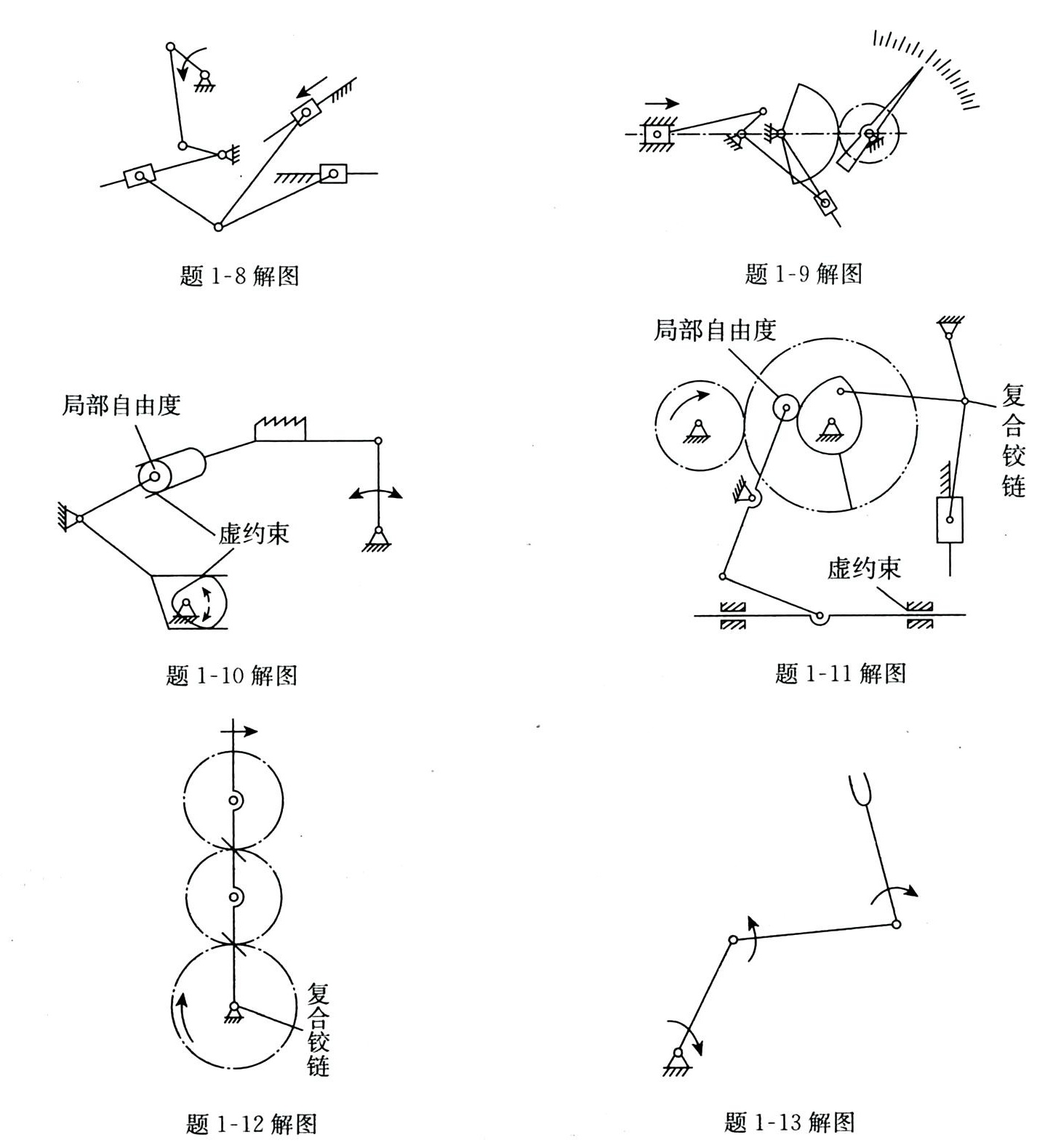
步骤 1:识别复合铰链、局部自由度和虚约束
在每个机构运动简图中,需要识别复合铰链、局部自由度和虚约束。复合铰链是指两个或两个以上构件在同一点上通过转动副连接,局部自由度是指不影响整个机构运动的自由度,虚约束是指在机构中重复的约束,不影响机构的自由度计算。
步骤 2:计算机构的自由度
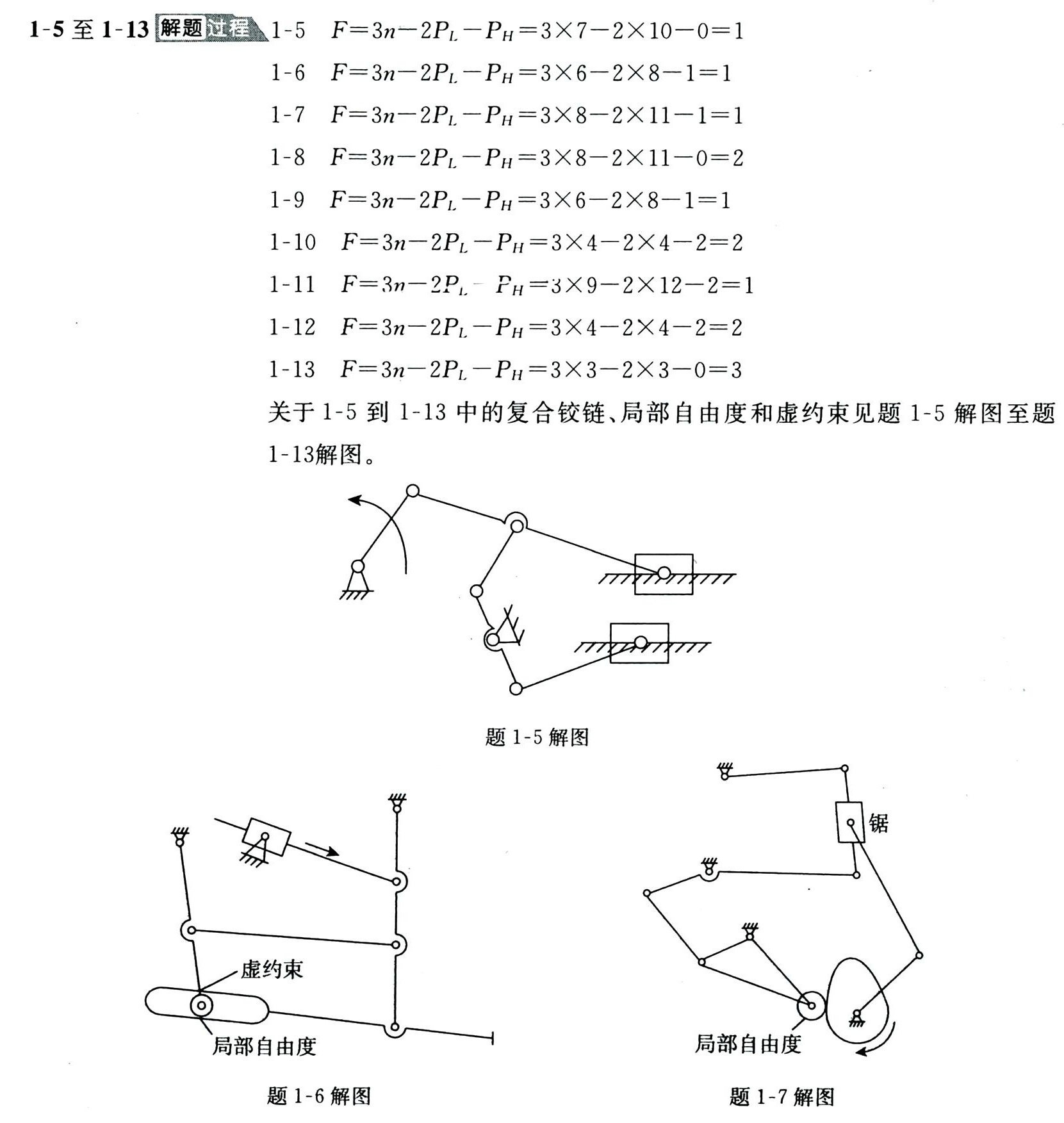
使用公式 $F=3n-2{P}_{L}-{P}_{H}$,其中 $F$ 是机构的自由度,$n$ 是活动构件的数目,${P}_{L}$ 是低副的数目,${P}_{H}$ 是高副的数目。在计算时,需要减去复合铰链、局部自由度和虚约束的影响。
步骤 3:验证计算结果
通过检查每个机构的计算过程,确保没有遗漏或错误,最终得到每个机构的自由度。
在每个机构运动简图中,需要识别复合铰链、局部自由度和虚约束。复合铰链是指两个或两个以上构件在同一点上通过转动副连接,局部自由度是指不影响整个机构运动的自由度,虚约束是指在机构中重复的约束,不影响机构的自由度计算。
步骤 2:计算机构的自由度
使用公式 $F=3n-2{P}_{L}-{P}_{H}$,其中 $F$ 是机构的自由度,$n$ 是活动构件的数目,${P}_{L}$ 是低副的数目,${P}_{H}$ 是高副的数目。在计算时,需要减去复合铰链、局部自由度和虚约束的影响。
步骤 3:验证计算结果
通过检查每个机构的计算过程,确保没有遗漏或错误,最终得到每个机构的自由度。