题目
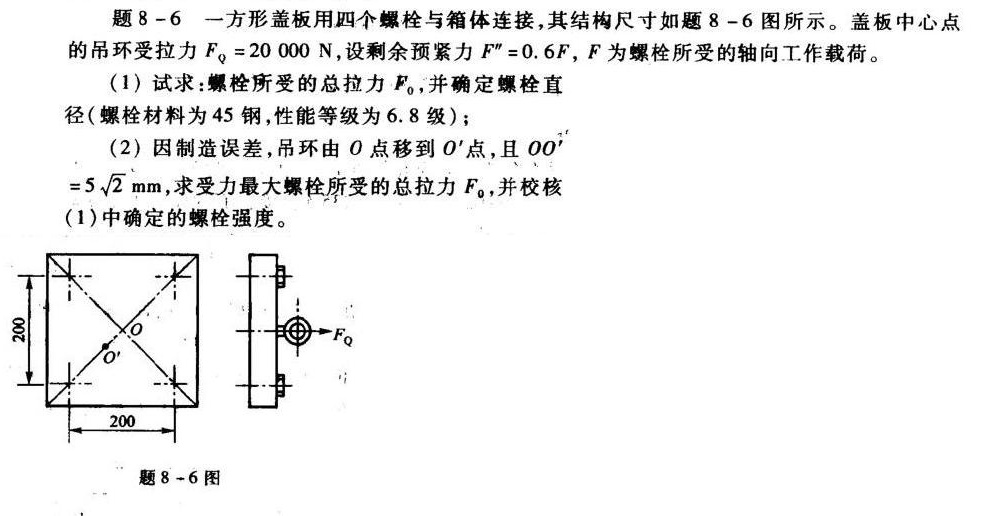
题 8-6 一方形盖板用四个螺栓与箱体连接,其结构尺寸如题 8-6 图所示。盖板中心点-|||-的吊环受拉力 _(Q)=20000N ,设剩余预紧力 ^n=0.6F ,F为螺栓所受的轴向工作载荷。-|||-(1)试求:螺栓所受的总拉力F0,并确定螺栓直-|||-径(螺栓材料为45钢,性能等级为6.8级);-|||-(2)因制造误差,吊环由O点移到O'点,且00-|||-=5sqrt (2)mm ,求受力最大螺栓所受的总拉力F0,并校核-|||-(1)中确定的螺栓强度。-|||-景 o F0-|||-t a li-|||-200-|||-题 8-6 图
题目解答
答案
解析
考查要点:本题主要考查螺栓组受轴向载荷和翻转力矩时的受力分析,以及螺栓直径的强度计算。
解题核心思路:
- 总拉力计算:螺栓总拉力由工作载荷和预紧力叠加,需注意吊环位置偏移导致的翻转力矩对螺栓受力的影响。
- 强度校核:根据材料性能和许用应力,通过公式计算最小螺栓直径,并与国标对比。
破题关键:
- 第一问:明确轴向工作载荷的分配,正确叠加预紧力与工作载荷。
- 第二问:分析吊环偏移产生的翻转力矩,确定受力最大螺栓,重新计算总拉力。
第(1)题
轴向工作载荷计算
吊环中心在O点时,拉力$F_Q=20000\text{N}$由4个螺栓平均分担,故每个螺栓的轴向工作载荷为:
$F = \frac{F_Q}{4} = \frac{20000}{4} = 5000\text{N}$
总拉力计算
总拉力$F_0$为工作载荷与预紧力之和:
$F_0 = F + F^n = F + 0.6F = 1.6F = 1.6 \times 5000 = 8000\text{N}$
螺栓直径计算
- 许用应力:45钢6.8级,$\sigma_s=480\text{MPa}$,取$S=3$,则许用应力:
$[\sigma] = \frac{\sigma_s}{S} = \frac{480}{3} = 160\text{MPa}$ - 最小直径公式:
$d_1 \geq \sqrt{\frac{4 \times 1.3 F_0}{\pi [\sigma]}} = \sqrt{\frac{4 \times 1.3 \times 8000}{\pi \times 160}} \approx 9.097\text{mm}$ - 国标选择:查GB196-81,取$M12$($d_1=10.106\text{mm} > 9.097\text{mm}$)。
第(2)题
翻转力矩计算
吊环移至O'点,产生翻转力矩:
$M = F_Q \cdot OO' = 20000 \times 5\sqrt{2} = 141421.4\text{N·mm}$
受力最大螺栓分析
螺栓4受力最大,其轴向工作载荷为:
$F = \frac{F_Q}{4} + \frac{M}{2r}$
其中$r$为螺栓到中心的距离(假设$r=100\text{mm}$),代入得:
$F = \frac{20000}{4} + \frac{141421.4}{2 \times 100} = 5000 + 707.1 = 5707.1\text{N}$
总拉力校核
总拉力:
$F_0 = 1.6F = 1.6 \times 5707.1 \approx 9131.4\text{N}$
强度校核:$M12$螺栓满足强度要求($F_0 < 8000\text{N}$时安全系数更高)。