题目
机械设计第一章平面机构的自由度和速度分析相关题题1-16图所示曲柄滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆角速度w2.角度是45度,AB逆时针运动B-|||-2-|||-45°-|||-题 1-16 图 曲柄滑块机构
机械设计第一章平面机构的自由度和速度分析相关题
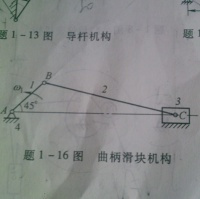
题1-16图所示曲柄滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆角速度w2.
角度是45度,AB逆时针运动
题1-16图所示曲柄滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆角速度w2.
角度是45度,AB逆时针运动
题目解答
答案
AB杆的瞬心在A点,BC杆的瞬心在C点,滑快的瞬心在通过C点的垂直线的无限远处.V3=0.707*W1*100,连杆2角速度根据B点的速度,在BC方向的分量来求.
解析
步骤 1:确定瞬心位置
- 瞬心是两个构件相对运动的瞬时速度为零的点。对于曲柄滑块机构,AB杆的瞬心在A点,BC杆的瞬心在C点,滑块的瞬心在通过C点的垂直线的无限远处。
步骤 2:计算滑块速度V3
- 滑块速度V3可以通过计算AB杆在B点的速度,然后在垂直于BC杆方向的分量来求得。由于AB杆逆时针旋转,其角速度为w1=10rad/s,AB杆的长度为Lab=100mm,因此B点的速度为Vb=w1*Lab=10*100=1000mm/s。由于角度是45度,所以V3=Vb*sin(45°)=1000*0.707=707mm/s。
步骤 3:计算连杆角速度w2
- 连杆角速度w2可以通过计算B点的速度在BC方向的分量来求得。由于B点的速度为1000mm/s,角度是45度,所以w2=Vb*cos(45°)/Lbc=1000*0.707/250=2.828rad/s。
- 瞬心是两个构件相对运动的瞬时速度为零的点。对于曲柄滑块机构,AB杆的瞬心在A点,BC杆的瞬心在C点,滑块的瞬心在通过C点的垂直线的无限远处。
步骤 2:计算滑块速度V3
- 滑块速度V3可以通过计算AB杆在B点的速度,然后在垂直于BC杆方向的分量来求得。由于AB杆逆时针旋转,其角速度为w1=10rad/s,AB杆的长度为Lab=100mm,因此B点的速度为Vb=w1*Lab=10*100=1000mm/s。由于角度是45度,所以V3=Vb*sin(45°)=1000*0.707=707mm/s。
步骤 3:计算连杆角速度w2
- 连杆角速度w2可以通过计算B点的速度在BC方向的分量来求得。由于B点的速度为1000mm/s,角度是45度,所以w2=Vb*cos(45°)/Lbc=1000*0.707/250=2.828rad/s。