题目
一数控系统[1]如图所示,试说明图中的各个部分分别属于机电一体化系统的哪一基本结构要素。 键盘 计算机 显示-|||-信号 功放 电源-|||-处理-|||-电机 H 工件台-|||-联轴器-|||-光电编码器 丝杠螺母机构-|||-齿轮-|||-减速器
一数控系统[1]如图所示,试说明图中的各个部分分别属于机电一体化系统的哪一基本结构要素。 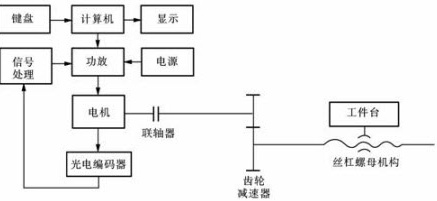
题目解答
答案
(1)控制及信息处理单元:键盘、计算机、显示 (2)测试传感部分:光电编码器、信号处理 (3)能源:电源 (4)驱动部分:功放、电机 (5)执行机构[2]:联轴器[3]、齿轮减速器、丝杠螺母机构、工作台
解析
步骤 1:识别控制及信息处理单元
控制及信息处理单元是机电一体化系统中负责信息处理和控制的部分。在本题中,键盘、计算机和显示设备共同构成了这一部分,它们负责接收指令、处理数据和显示信息。
步骤 2:识别测试传感部分
测试传感部分是机电一体化系统中负责检测和反馈信息的部分。在本题中,光电编码器和信号处理设备共同构成了这一部分,它们负责检测位置和速度等信息,并将这些信息反馈给控制及信息处理单元。
步骤 3:识别能源部分
能源部分是机电一体化系统中提供动力的部分。在本题中,电源设备构成了这一部分,它为整个系统提供所需的电能。
步骤 4:识别驱动部分
驱动部分是机电一体化系统中负责将电能转换为机械能的部分。在本题中,功放和电机共同构成了这一部分,它们负责将电能转换为机械能,驱动执行机构运动。
步骤 5:识别执行机构
执行机构是机电一体化系统中负责执行动作的部分。在本题中,联轴器、齿轮减速器、丝杠螺母机构和工作台共同构成了这一部分,它们负责将驱动部分提供的机械能转换为所需的运动。
控制及信息处理单元是机电一体化系统中负责信息处理和控制的部分。在本题中,键盘、计算机和显示设备共同构成了这一部分,它们负责接收指令、处理数据和显示信息。
步骤 2:识别测试传感部分
测试传感部分是机电一体化系统中负责检测和反馈信息的部分。在本题中,光电编码器和信号处理设备共同构成了这一部分,它们负责检测位置和速度等信息,并将这些信息反馈给控制及信息处理单元。
步骤 3:识别能源部分
能源部分是机电一体化系统中提供动力的部分。在本题中,电源设备构成了这一部分,它为整个系统提供所需的电能。
步骤 4:识别驱动部分
驱动部分是机电一体化系统中负责将电能转换为机械能的部分。在本题中,功放和电机共同构成了这一部分,它们负责将电能转换为机械能,驱动执行机构运动。
步骤 5:识别执行机构
执行机构是机电一体化系统中负责执行动作的部分。在本题中,联轴器、齿轮减速器、丝杠螺母机构和工作台共同构成了这一部分,它们负责将驱动部分提供的机械能转换为所需的运动。