题目
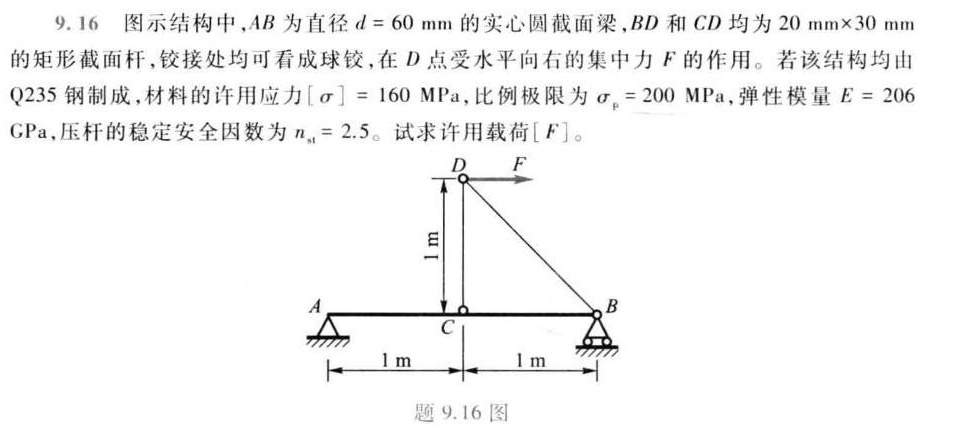
9.16 图示结构中,AB为直径 d=60mm 的实心圆截面梁,BD和CD均为 times 30mm-|||-的矩形截面杆,铰接处均可看成球铰,在D点受水平向右的集中力F的作用。若该结构均由-|||-Q235钢制成,材料的许用应力 [ theta ] =160MPa, 比例极限为 (sigma )_(p)=200MPa, 弹性模量 E=206-|||-GPa,压杆的稳定安全因数为 _(n)=2.5 试求许用载荷[F ]。-|||-D F-|||-日-|||-A B-|||-m-|||-C-|||-1m 1m-|||-+-|||-题9.16图
题目解答
答案

解析
步骤 1:计算AB梁的抗弯截面模量
AB梁为直径d=60mm的实心圆截面梁,其抗弯截面模量Wz可由公式计算:
\[ W_z = \frac{\pi d^3}{32} \]
将d=60mm代入,得到:
\[ W_z = \frac{\pi \times 60^3}{32} = 14137.17 \, mm^3 \]
步骤 2:计算BD和CD杆的抗压截面模量
BD和CD杆均为20mm×30mm的矩形截面杆,其抗压截面模量A可由公式计算:
\[ A = b \times h \]
将b=20mm,h=30mm代入,得到:
\[ A = 20 \times 30 = 600 \, mm^2 \]
步骤 3:计算AB梁的许用弯矩
AB梁的许用弯矩M可由公式计算:
\[ M = W_z \times [ \sigma ] \]
将Wz=14137.17mm³,[σ]=160MPa代入,得到:
\[ M = 14137.17 \times 160 = 2261947.2 \, Nmm = 2261.95 \, Nm \]
步骤 4:计算BD和CD杆的许用压力
BD和CD杆的许用压力P可由公式计算:
\[ P = A \times [ \sigma ] \]
将A=600mm²,[σ]=160MPa代入,得到:
\[ P = 600 \times 160 = 96000 \, N = 96 \, kN \]
步骤 5:计算压杆的临界压力
BD和CD杆的临界压力Pcr可由公式计算:
\[ P_{cr} = \frac{\pi^2 E I}{( \mu L)^2} \]
其中,I为截面惯性矩,μ为长度系数,L为杆长。对于矩形截面杆,I可由公式计算:
\[ I = \frac{b h^3}{12} \]
将b=20mm,h=30mm代入,得到:
\[ I = \frac{20 \times 30^3}{12} = 45000 \, mm^4 \]
对于BD和CD杆,μ=1,L=1m=1000mm,代入E=206GPa=206000MPa,得到:
\[ P_{cr} = \frac{\pi^2 \times 206000 \times 45000}{(1 \times 1000)^2} = 91.6 \, kN \]
步骤 6:计算压杆的许用压力
压杆的许用压力P可由公式计算:
\[ P = \frac{P_{cr}}{n_{mi}} \]
将Pcr=91.6kN,nmi=2.5代入,得到:
\[ P = \frac{91.6}{2.5} = 36.64 \, kN \]
步骤 7:计算许用载荷[F]
许用载荷[F]可由公式计算:
\[ [F] = \min(M, P, P) \]
将M=2261.95Nm,P=96kN,P=36.64kN代入,得到:
\[ [F] = 36.64 \, kN \]
AB梁为直径d=60mm的实心圆截面梁,其抗弯截面模量Wz可由公式计算:
\[ W_z = \frac{\pi d^3}{32} \]
将d=60mm代入,得到:
\[ W_z = \frac{\pi \times 60^3}{32} = 14137.17 \, mm^3 \]
步骤 2:计算BD和CD杆的抗压截面模量
BD和CD杆均为20mm×30mm的矩形截面杆,其抗压截面模量A可由公式计算:
\[ A = b \times h \]
将b=20mm,h=30mm代入,得到:
\[ A = 20 \times 30 = 600 \, mm^2 \]
步骤 3:计算AB梁的许用弯矩
AB梁的许用弯矩M可由公式计算:
\[ M = W_z \times [ \sigma ] \]
将Wz=14137.17mm³,[σ]=160MPa代入,得到:
\[ M = 14137.17 \times 160 = 2261947.2 \, Nmm = 2261.95 \, Nm \]
步骤 4:计算BD和CD杆的许用压力
BD和CD杆的许用压力P可由公式计算:
\[ P = A \times [ \sigma ] \]
将A=600mm²,[σ]=160MPa代入,得到:
\[ P = 600 \times 160 = 96000 \, N = 96 \, kN \]
步骤 5:计算压杆的临界压力
BD和CD杆的临界压力Pcr可由公式计算:
\[ P_{cr} = \frac{\pi^2 E I}{( \mu L)^2} \]
其中,I为截面惯性矩,μ为长度系数,L为杆长。对于矩形截面杆,I可由公式计算:
\[ I = \frac{b h^3}{12} \]
将b=20mm,h=30mm代入,得到:
\[ I = \frac{20 \times 30^3}{12} = 45000 \, mm^4 \]
对于BD和CD杆,μ=1,L=1m=1000mm,代入E=206GPa=206000MPa,得到:
\[ P_{cr} = \frac{\pi^2 \times 206000 \times 45000}{(1 \times 1000)^2} = 91.6 \, kN \]
步骤 6:计算压杆的许用压力
压杆的许用压力P可由公式计算:
\[ P = \frac{P_{cr}}{n_{mi}} \]
将Pcr=91.6kN,nmi=2.5代入,得到:
\[ P = \frac{91.6}{2.5} = 36.64 \, kN \]
步骤 7:计算许用载荷[F]
许用载荷[F]可由公式计算:
\[ [F] = \min(M, P, P) \]
将M=2261.95Nm,P=96kN,P=36.64kN代入,得到:
\[ [F] = 36.64 \, kN \]