第四章 习题4-1 已知F1=60N,F2=80N,F3=150N,m=100N.m,转向为逆时针,θ=30°图中距离单位为m。试求图中力系向O点简化结果及最终结果。(0,2) F1-|||-F2-|||-m (5,0)-|||-一9 o(0,-4)-|||-F3-|||-题 4-1 图(0,2) F1-|||-F2-|||-m (5,0)-|||-一9 o(0,-4)-|||-F3-|||-题 4-1 图4-2 已知物体所受力系如图所示,F=10Kn,m=20kN.m,转向如图。(a)若选择x轴上B点为简化中心,其主矩LB=10kN.m,转向为顺时针,试求B点的位置及主矢R’。(b)若选择CD线上E点为简化中心,其主矩LE=30kN.m,转向为顺时针,α=45°,试求位于CD直线上的E点的位置及主矢R’。4-3 试求下列各梁或刚架的支座反力。
第四章 习题
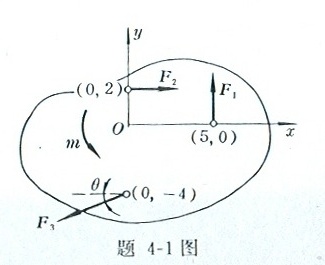
4-1 已知F1=60N,F2=80N,F3=150N,m=100N.m,转向为逆时针,θ=30°图中距离单位为m。试求图中力系向O点简化结果及最终结果。
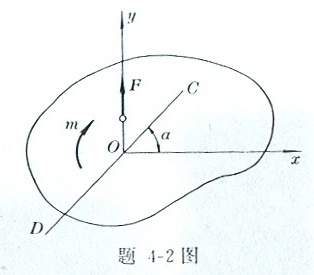
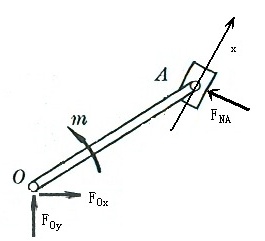
4-2 已知物体所受力系如图所示,F=10Kn,m=20kN.m,转向如图。
(a)若选择x轴上B点为简化中心,其主矩LB=10kN.m,转向为顺时针,试求B点的位置及主矢R’。
(b)若选择CD线上E点为简化中心,其主矩LE=30kN.m,转向为顺时针,α=45°,试求位于CD直线上的E点的位置及主矢R’。
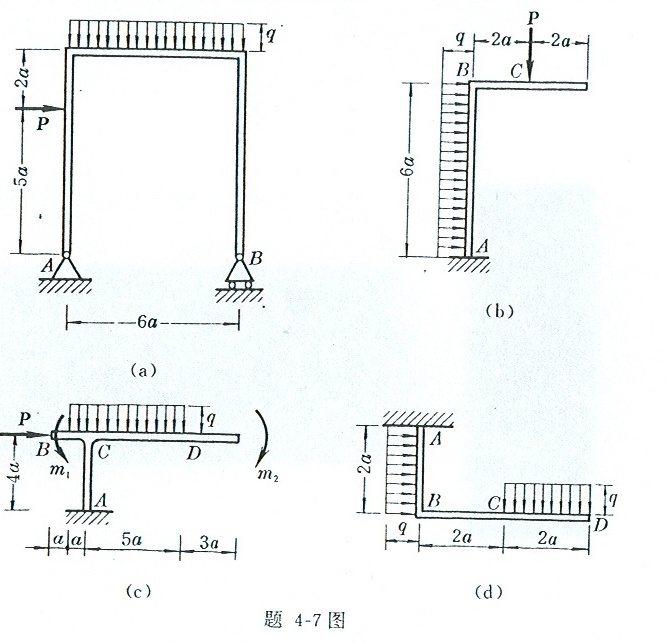
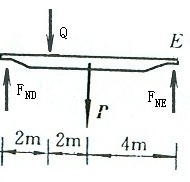
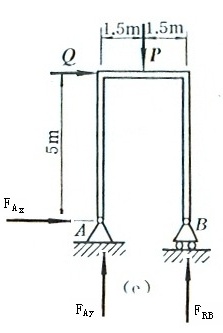
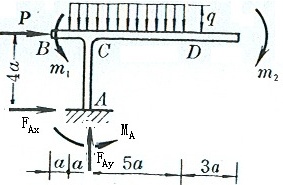
4-3 试求下列各梁或刚架的支座反力。
题目解答
答案
解:
(a) 受力如图
由∑M=0 F•3a-Psin30°•2a-Q•a=0
∴FRB=(P+Q)/3
由 ∑x=0 F-Pcos30°=0
∴FAx=P
由∑Y=0 FAx+F-Q-Psin30°=0
部分的受力图。
参考答案
1-1解:
1-2解:
∴F=(4Q+P)/6
4-4 高炉上料的斜桥,其支承情况可简化为如图所示,设A和B为固定铰,D为中间铰,料车对斜桥的总压力为Q,斜桥(连同轨道)重为W,立柱BD质量不计,几何尺寸如图示,试求A和B的支座反力。
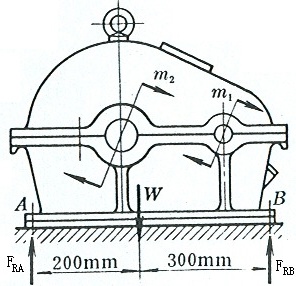
4-5 齿轮减速箱重W=500N,输入轴受一力偶作用,其力偶矩m=600N.m,输出轴受另一力偶作用,其力偶矩m=900N.m,转向如图所示。试计算齿轮减速箱A和B两端螺栓和地面所受的力。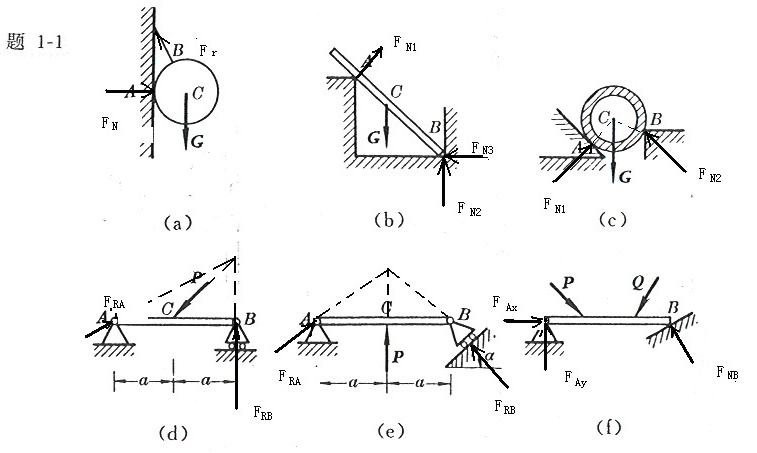
4-6 试求下列各梁的支座反力。
(a) (b)
4-7 各刚架的载荷和尺寸如图所示,图c中m1>m2,试求刚架的各支座反力。
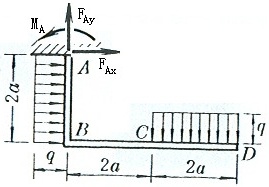
4-8 图示热风炉高h=40m,重W=4000kN,所受风压力可以简化为梯形分布力,如图所示,q=500kN/m,q=2.5kN/m。可将地基抽象化为固顶端约束,试求地基对热风炉的反力。
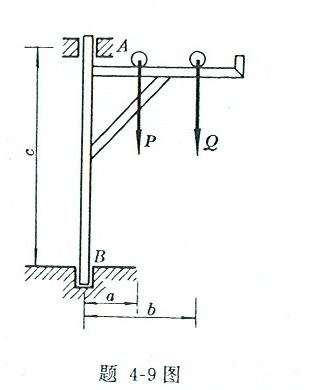
4-9 起重机简图如图所示,已知P、Q、a、b及c,求向心轴承A及向心推力轴承B的反力。
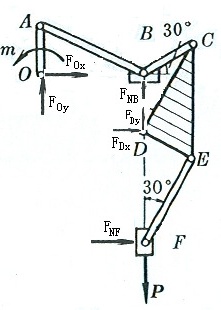
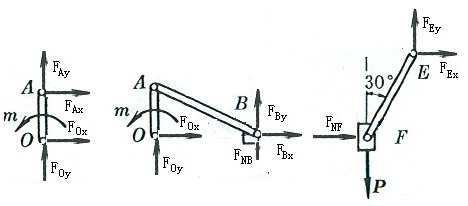
4-10 构架几何尺寸如图所示,R=0.2m,P=1kN。E为中间铰,求向心轴承A的反力、向心推力轴承B的反力及销钉C对杆ECD的反力。
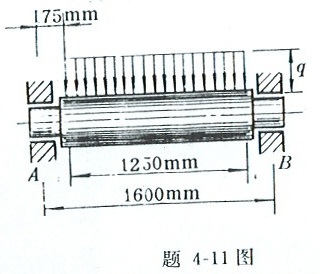
4-11 图示为连续铸锭装置中的钢坯矫直辊。钢坯对矫直辊的作用力为一沿辊长分布的均布力q,已知q=1kN/mm,坯宽1.25m。试求轴承A和B的反力。
4-12 立式压缩机曲轴的曲柄EH转到垂直向上的位置时,连杆作用于曲柄上的力P最大。现已知P=40kN,飞轮重W=4kN。求这时轴承A和B的反力。
4-13 汽车式起重机中,车重W=26kN,起重臂CDE重G=4.5kN,起重机旋转及固定部分重W=31kN,作用线通过B点,几何尺寸如图所示。这时起重臂在该起重机对称面内。求最大起重量P。
4-14 平炉的送料机由跑车A及走动的桥B所组成,跑车装有轮子,可沿桥移动。跑车下部装有一倾覆操纵柱D,其上装有料桶C。料箱中的载荷Q=15kN,力Q与跑车轴线OA的距离为5m,几何尺寸
如图所示。如欲保证跑车不致翻倒,试问小车连同操纵柱的重量W最小应为多少?
4-15 两根位于垂直平面内的均质杆的底端彼此相靠地搁在光滑地板上,其上端则靠在两垂直且光滑的墙上,质量分别为P1与P2。求平衡时两杆的水平倾角α与α的关系。
4-16 均质细杆AB重P,两端与滑块相连,滑块A和B可在光滑槽内滑动,两滑块又通过滑轮C用绳索相互连接,物体系处于平衡。
(a)用P和θ表示绳中张力T;
(b)当张力T=2P时的θ值。
4-17 已知a,q和m,不计梁重。试求图示各连续梁在A、B和C处的约束反力。
4-18 各刚架的载荷和尺寸如图所示,不计刚架质量,试求刚架上各支座反力。
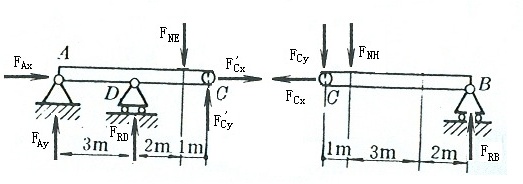
4-19 起重机在连续梁上,已知P=10kN,Q=50kN,不计梁质量,求支座A、B和D的反力。
4-20 箱式电炉炉体结构如图a所示。D为炉壳,E为炉顶拱,H为绝热材料,I为边墙,J为搁架。在实际炉子设计中,考虑到炉子在高温情况下拱顶常产生裂缝,可将炉拱简化成三铰拱,如图b所示。已知拱顶是圆弧形,跨距l=1.15m,拱高h=0.173m,炉顶重G=2kN。试求拱脚A和B处反力。
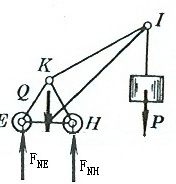
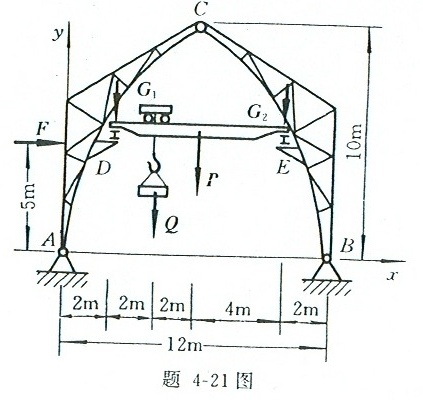
4-21 图示厂房房架是由两个刚架AC和BC用铰链连接组成,A与B两铰链固结于地基,吊车梁宰房架突出部分D和E上,已知刚架重G=G=60kN,吊车桥重Q=10kN,风力F=10kN,几何尺寸如图
所示。D和E两点分别在力G和G的作用线上。求铰链A、B和C的反力。
4-22 图示构架由滑轮D、杆AB和CBD构成,一钢丝绳绕过滑轮,绳的一端挂一重物,重量为G,另一端系在杆AB的E处,尺寸如图所示,试求铰链A、B、C和D处反力。
4-23 桥由两部分构成,重W1=W2=40kN,桥上有载荷P=20kN,尺寸如图所示,试求出铰链A、B和C的反力。
4-24 图示结构,在C、D、E、F、H处均为铰接。已知P1=60kN,P2=40 kN,P=70kN,几何尺寸如图所示。试求各杆所受的力。
4-25 构架的载荷和尺寸如图所示,已知P=24kN,求铰链A和辊轴B的反力及销钉B对杆ADB的反力。
4-26 构架的载荷和尺寸如图所示,已知P=40kN,R=0.3m,求铰链A和B的反力及销钉C对杆ADC的反力。
4-27 图示破碎机传动机构,活动夹板AB长为600mm,假设破碎时矿石对活动夹板作用力沿垂直于AB方向的分力P=1kN,BC=CD=600mm,AH=400mm,OE=100mm,图示位置时,机构平衡。试求电机对杆OE作用的力偶的力偶矩m。
4-28 曲柄滑道机构如图所示,已知m=600N.m,OA=0.6m,BC=0.75m。机构在图示位置处于平衡,α=30°,β=60°。求平衡时的P值及铰链O和B反力。
4-29 插床机构如图所示,已知OA=310mm,OB=AB=BC=665mm,CD=600mm,OO=545mm,P=25kN。在图示位置:OOA在铅锤位置;OC在水平位置,机构处于平衡,试求作用在曲柄OA上的主动力偶的力偶矩m。
4-30 在图示机构中,OB线水平,当B、D、F在同一铅垂线上时,DE垂直于EF,曲柄OA正好在铅锤位置。已知OA=100mm,BD=BC=DE=100mm,EF=100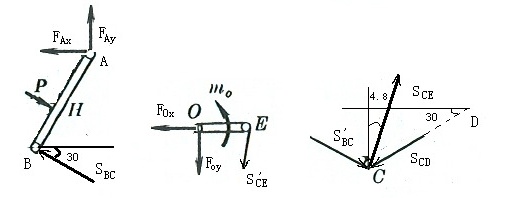 mm,不计杆重和摩擦,求图示位置平衡时m/P的值。
mm,不计杆重和摩擦,求图示位置平衡时m/P的值。
4-31 图示屋架为锯齿形桁架。G=G=20kN,W=W=10kN,几何尺寸如图所示,试求各杆内力。
4-32 图示屋架桁架。已知F=F=F=F=30kN,F=40kN,几何尺寸如图所示,试求各杆内力。
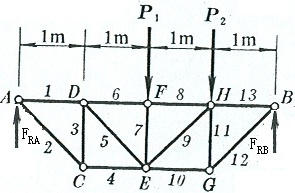
4-33 桥式起重机机架的尺寸如图所示。P=100kN,P=50kN。试求各杆内力。
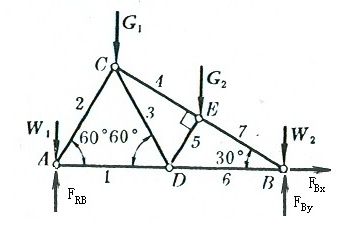
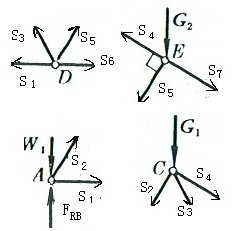
4-34图示屋架桁架,载荷G1=G2=G1=G2=G=G,几何尺寸如图所示,试求:杆1、2、3、4、5和6 的内力。
参考答案
4-1 解: 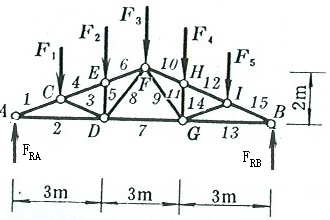
 ∴α=196°42′
∴α=196°42′
(顺时针转向)
故向O点简化的结果为: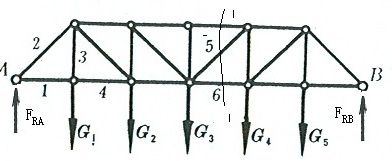
由于F′≠0,L≠0,故力系最终简化结果为一合力 ,大小和方向与主矢相同,合力FR的作用线距O点的距离为d。
,大小和方向与主矢相同,合力FR的作用线距O点的距离为d。
F=F=52.1N
d=L/F=5.37m
4-2 解:(a)设B点坐标为(b,0)
L=∑M( )=-m-Fb=-10kN.m
)=-m-Fb=-10kN.m
∴b=(-m+10)/F=-1m ∴B点坐标为(-1,0)
 = ∴FR′=10kN,方向与y轴正向一致
= ∴FR′=10kN,方向与y轴正向一致
(b)设E点坐标为(e,e)
L=∑MR()=-m-F•e=-30kN.m
∴e=(-m+30)/F=1m ∴E点坐标为(1,1)
FB′=10kN 方向与y轴正向一致
4-3解:(a) 受力如图
由∑MR=0 F•3a-Psin30°•2a-Q•a=0
∴FRB=(P+Q)/3
由 ∑x=0 FE-Pcos30°=0
∴F=P
由∑Y=0 FR+F-Q-Psin30°=0
∴F=(4Q+P)/6
(b)受力如图
由∑MAx=0 F•cos30°-P•2a-Q•a=0
∴FAx= (Q+2P)
(Q+2P)
由 ∑x=0 FAy-FRB•sin30°=0
∴FAy=(Q+2P)
由∑Y=0 F+F•cos30°-Q-P=0
∴F=(2Q+P)/3
(c)解:受力如图:

由∑MAx=0 FRB•3a+m-P•a=0
∴FAx=(P-m/a)/3
由 ∑x=0 FAy=0
由∑Y=0 FAy+F-P=0
∴F=(2P+m/a)/3
(d)解:受力如图:
由∑MRB=0 F•2a+m-P•3a=0
∴FAx=(3P-m/a)/2
由 ∑x=0 FAy=0
由∑Y=0 FAy+F-P=0
∴F=(-P+m/a)/2
(e)解:受力如图:
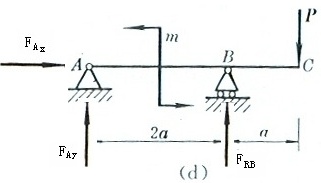
由∑MA=0 FRB•3-P•1.5-Q•5=0
∴FRB=P/2+5Q/3
由 ∑x=0 FAx+Q=0
∴FAy=-Q
由∑Y=0 FAy+F-P=0
∴F=P/2-5Q/3
(f)解:受力如图:
由∑MA=0 FRB•2+m-P•2=0
∴FRB=P-m/2
由 ∑x=0 FAx+P=0
∴FAx=-P
由∑Y=0 FAy+FRB =0
∴FAy=-P+m/2
4-4解:结构受力如图示,BD为二力杆
由∑M=0 -F•a+Q•b+W•l/2•cosα=0
∴F=(2Qb+Wlcosα)/2a
由∑F=0 -F-Qsinα=0
∴F=-Qsinα
由∑FA=0 FRB+F-W-Qcosα=0
∴FRB=Q(cosα-b/a)+W(1-lcosα/2a)
4-5 解:齿轮减速箱受力如图示,
由∑MAy=0 FRB×0.5-W×0.2-m-m=0
FAy=3.2kN
由∑F=0 F+F-W=0
FA=-2.7kN
4-6 解:
(a)由∑FAx=0 F=0 (b) 由∑F=0 F=0
由∑Fy=0 FRB=0 由∑FAy=0 F-qa-P=0
由∑M=0 MAy-m=0 M=m ∴F=qa+P
由∑M=0 M-q•a•a/2-Pa=0
∴M=qa/2+Pa
(c) (d)
(c) 由∑Fy=0 FRA+P=0 (d) 由∑FRB=0 F=0
∴FRA=-P 由∑M=0 F•5a+m-m-q•3a•3a/2=0
由∑F=0 F-q•l/2=0 ∴F=0.9qa+(m-m)/5a
FAy=ql/2 由∑F=0 F+F-q•3a=0
由∑M=0 Mx-q•l/2•l/4-m-Pa=0 FAx=2.1qa+(mx-mAx)/5a
∴My=ql2/8+m+Pa
4-7 解:
(a) (b)
(a)∑M=0 F•6a-q(6a)/2-P•5a=0 ∴F=3qa+5P/6
∑F=0 F+P=0 ∴F =-P
∑Fx=0 FAx+Fx-q•6a=0 ∴FAx=3qa-5P/6
(b) ∑MAx=0 MA-q(6a)RB/2-P•2a=0 ∴M1=18qa2+2Pa
∑Fy=0 FAy+q•6a=0 ∴FRB =-6qa
∑Fy=0 FAy-P=0 ∴FRB=P
1-3解:
1-4解:
1-5解:
(c) ∑My=0 MAy+mRB-mAy-q•6a•2a-P•4a=0 ∴M=12qa+4Pa+m-m
∑FA=0 FA+P=0 ∴F2=-P
∑Fx=0 FAx-q•6a=0 ∴FAx=6qa
(d) ∑My=0 MAy+q(2a)Ay/2-q•2a•3a=0 ∴M=4qa
∑F=0 F-q•2a=0 ∴F =2qa
∑F=0 F-q•2a=0 ∴F =2qa
4-8解:热风炉受力分析如图示,
∑F=0 F+q•h+(q-q)•h/2=0 ∴F=-60kN
∑F=0 F-W=0 ∴F=4000kN
∑M=0 M-q•h•h/2-(q-q)•h•2h/3/2=0 ∴M=1467.2kN•m
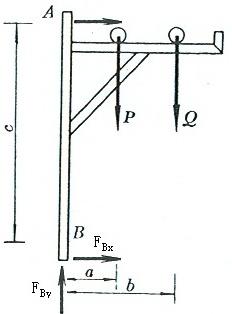
4-9解:起重机受力如图示,
∑My=0 -FAy•c-P•a-Q•b=0 ∴FAy=-(Pa+Qb)/c
∑FA=0 FA+F2=0 ∴FA=(Pa+Qb)/c
∑Fx=0 FAx-P-Q=0 ∴FAx=P+Q
4-10 解:整体受力如图示
∑M=0 -F×5.5-P×4.2=0 ∴F=-764N
∑Fx=0 Fox+F1=0 ∴F2=764N
∑Fy=0 FAy-P=0 ∴FAy=1kN
由∑MA=0 F×2+P×0.2-P×4.2=0 ∴F2=2kN
由∑M=0 F’×2-F×2-P×2.2+P×0.2=0 ∴F=F’=3kN
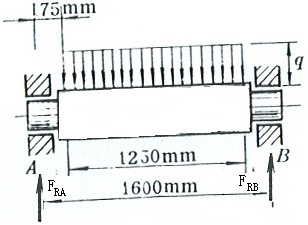
4-11解:辊轴受力如图示,
由∑MB=0 FRA×1600-q×1250×(1250/2+175)=0
∴Fx=625N
由∑Fy=0 FBy+FBy-q×1250=0 ∴F=625N
4-12 解:机构受力如图示,
∑MB=0 -P×0.3+FRA×0.6-W×0.9=0 ∴FRA=26kN
∑Fx=0 FBx+FRA-P-W=0 ∴FBx=18kN
4-13 解:当达到最大起重质量时,Fy=0
由∑ME=0 WCy×α+WCy×0-G×2.5-P×5.5=0
∴PH=7.41kN
4-14解:受力如图示,不致翻倒的临界状态是F=0
由∑MA=0 W×1m-Q×(5-1)=0 ∴W=60kN
故小车不翻倒的条件为W≥60kN
4-15解:设左右杆长分别为l1、l2,受力如图示
左杆:∑MA=0 PRB(lRB/2)cosα-Flsinα=0 ∴F=ctgαP/2
右杆:∑My=0 -PRA(lRB/2)cosαRA+F'lsinα=0 ∴F'=ctgαP/2
由FNA=F' ∴P/P=tgα/tgα
4-16解:设杆长为l,系统受力如图
(a) ∑M=0 P •l/2cosθ+T•l•sinθ-Tlcosθ=0 ∴T=P/2(1-tgθ)
(b)当T=2P时, 2P= P/2(1-tgθ) ∴tgθ3/4 即θ≈36°52′
4-17 解:
(a)
(a)取BC杆:
∑MO1=0 F1•2a=0 ∴F1=0
∑FO2=0 F2=0
∑FA=0 -FA+F1=0 ∴F2=0
取整体:
∑M=0 -q•2a•a+F•4a+M=0 ∴M=2qa
∑F=0 F=0
∑F=0 F+F-q•2a=0 ∴F==2qa
(b)
(b)取BC杆:
∑M=0 F•2a-q•2a•a=0 ∴F=qa
∑FB=0 FRC=0
∑Fx=0 FBx-q•2a-F=0 ∴F=-qa
取整体:
∑M=0 M+F•4a-q•3a•2.5a=0 ∴M=3.5qa
∑FA=0 FRC=0
∑Fx=0 FAx+F-q•3a=0 ∴F==2qa
(c)
(c)取BC杆:
∑M=0 F•2a =0 ∴F=0
∑FB=0 FRC=0
∑Fx=0 FBx-F=0 ∴F=0
取整体:
∑M=0 M+F•4a-m=0 ∴M=m
∑FA=0 FA=0
∑Fx=0 FAx+F=0 ∴F=0
(d)
(d)取BC杆:
1-6解:
1-7解:
∑MA=0 FA•2a-m=0 ∴FRC=m/2a
∑Fx=0 FAx=0
∑Fy=0 FAy-FRC=0 ∴FAy=m/2a
取整体:
∑M=0 M+F•4a-m=0 ∴M=-m
∑F=0 F=0
∑F=0 F+F=0 ∴F=-m/2a
4-18 解:
(a)取BE部分
∑M=0 F×5.4-q×5.4×5.4/2=0 ∴F=2.7q
取DEB部分:
∑Mx=0 FBx×5.4+F×6-q×5.4×5.4/2=0 ∴F=0
取整体:
∑M=0 F×6+ q×5.4×5.4/2-F×cos45°×3=0 ∴F=6.87q
∑FA=0 FA×cos45°+FRC+FA-q×5.4=0 ∴F=-2.16q
∑Fx=0 FAx×sin45°+F+F=0 ∴F=-4.86q
(b)取CD段,
∑M=0 F×4-q/2×4=0 ∴F=2q
取整体:
∑M=0 F×8+F×12q×4×10-q×6×4-P×4=0
∑FE=0 P+FBx=0 ∴FBx=-P
∑F=0 F+F+F-q×6-q×4=0 ∴F=3q-P/2
4-19 解:连续梁及起重机受力如图示:
取起重机:∑MA=0 Q×1-P×3-FBy×2=0 ∴FRC=10kN
∑Fx=0 FRC+FAx-Q-P=0 ∴FBx=50kN
取BC段:∑My=0 FRC×6-FAy×1=0 ∴FBy=8.33kN
取ACB段:∑M=0 F×3+F×12-F×5-F×7=0 ∴F=100kN
∑FC=0 FRD=0
∑F=0 F+F+F-F-F=0 ∴F=48.33kN
4-20解:整体及左半部分受力如图示
取整体:∑Mx=0 FAx×l-G×l/2=0 ∴FAx=1kN
∑My=0 -FAy×l+G×l/2=0 ∴FRB=1kN
取左半部分:∑M=0 F×h+G/2×l/4-F×l/2=0 ∴F=1.66kN
取整体:∑F=0 F+F=0 ∴F=-1.66kN
4-21 解:各部分及整体受力如图示
取吊车梁:∑MC=0 FRB×8-P×4-Q×2=0 ∴FNH=12.5kN
∑FA=0 FRD+FRB-Q-P=0 ∴FNE=17.5kN
取T房房架整体:
∑My=0 FAy×12-(GRD+FRB)×10-(GNE+FNH)×2-F×5=0 ∴FAy=77.5kN
∑M=0 -F×12-F×5+(G+F)×2+(G+F)×2=0 ∴F=72.5kN
取T房房架作部分:
∑MB=0 FAy×6-FAy×10-F×5-(G+F) ×4=0 ∴F=7.5kN
∑Fx=0 FC+F+FAx=0 ∴FAy=-17.5kN
∑Fy=0 Fx+FAx-GBx-FBx=0 ∴F=5kN
取T房房架整体:
∑F=0 F+F+F=0
∴FD=-17.5kN
4-22解:整体及部分受力如图示
取整体:∑MB=0 -FAy•l•tg45°-G•(2l+5)=0 ∴F1=-(2+5/l)G
∑M=0 F•ltg45°-G(2l+5)=0 ∴F=(2+5/l)G
取AE杆:∑MC=0 –FAy•l-FAx•l-G•r=0 ∴F1=2G
∑FCx=0 FAx+FCx+G=0 ∴F=(1+5/l)G
∑FCy=0 FAy+F1=0 ∴FND=-2G
取整体:∑F=0 F+F-G=0 ∴F=-G
取轮D: ∑Fx=0 FAx-G=0 ∴FBx=G
∑FBx=0 F-G=0 ∴F=G
4-23 解:整体及部分受力如图示
取整体:∑M=0 F×10-W×9-P×4-W×1=0 ∴F=48kN
∑F=0 F+F-W-W-P=0 ∴F=52kN
取AB段:∑MC=0 FAx×4+WAx×4+P×1-F×5=0 ∴F=20kN
∑FA=0 FCx+FCx=0 ∴F=-20kN
∑FE=0 FAx+FAy-WAy-P=0 ∴F=8kN
取整体:∑Fx=0 FAx+FBx=0 ∴FBx=-20kN
4-24 解:系统中1、2、3、4、5杆均为二力杆,整体及部分受力如图:
取整体:∑Fy=0 FDy=0
∑M=0 -3P-6P-10P+14F=0 ∴F=80kN
∑FB=0 FCy+F2-P1-PCy-P=0 ∴F=90kN
取左半部分:∑My=0 PBy×1+PCy×4-F1×7+S2×3=0 ∴SBy=117kN
取节点E:∑FA=0 SBx-S1cosα=0 ∴SBy=146kN
∑Fx=0 SBx+SAxsinα=0 ∴SAx=-87.6kN
取节点F:∑Fy=0 -SBy+SAycosα=0 ∴S1=146kN
∑Fx=0 SBx+SCxsinα=0 ∴SCx=-87.6kN
4-25解:整体及部分受力如图示:
取整体:∑M=0 F×4-P(1.5-R)-P(2+R)=0 ∴F=21kN
∑F=0 F-P=0 ∴F=24kN
∑Fx=0 FAx+F-P=0 ∴F=3kN
取ADB杆:∑MA=0 F1×2-F2×2=0 ∴F3=3kN
取B点建立如图坐标系:
∑FH=0 (F2-F'1)sinθ-F'Aycosθ=0 且有F3=F'3,F=F'
∴F'x18tgθ=18×2/1.5=24kN
4-26 解:整体及部分受力如图示:
取整体:∑My=0 F4×4+P×4.3=0 ∴F5=-43kN
∑F=0 F+F=0 ∴F=43kN
取BC杆:∑MA=0 FRB×4+P×0.3-P×0.3-P×2.3-FRB×4=0 ∴F=20kN
∑Fx=0 FAx+FAx-P=0 ∴F=-3kN
∑Fy=0 FAy+P+FRB-P=0 ∴FAy=-20kN
取整体: ∑FD=0 FBy+FAy-P=0 ∴FBy=20kN
4-27 解:受力如图示:
取AB: ∑Mx=0 P×0.4-SRB×0.6=0 ∴SBy=0.667kN
取C点:∑FBx=0 S'sin60°+Ssin4.8°-Scos30°=0
∑F=0 -S'cos60°+Scos4.8°-Ssin30°=0
联立后求得:S=0.703kN
取OE: ∑MB=0 mAx-SAxcos4.8°×0.1=0
∴mx=70kN
4-28 解:整体及部分受力如图示:
取OA杆,建如图坐标系:
∑My=0 FBy×0.6 sin60°+m-FCy×0.6cos30°=0
∑Fy=0 FAy×cos60°+FBycos30°=0
联立上三式:F=572.4N F=-1000N
取整体:
∑Mx=0 -FBC×(0.6×cos30°-0.6 sin30°×ctg60°)-P×0.75×sin60°+m=0
∴P=615.9N
∑FCE=0 F+F+P=0 ∴F=384.1N
∑FO=0 F+FCE=0 ∴F=-577.4N
4-29 解:整体及部分受力如图示:
取CD部分:∑M=0 F×0.6cosα-P×0.6sinα=0 ∴F=Ptgα
取OA部分:∑MA=0 -FOx×0.31-m=0 ∴Foy=-m/0.31
取整体:∑My=0 Fox×0.545-m+P×1.33-Foy×0.6cosα=0
代入后有:-m/0.31×0.545-m+×1.33-Ptgα×0.6 cosα=0
∴m=9.24kN•m
4-30 解:整体及部分受力如图示:
取OA段:∑Mx=0 m+Fox×0.1=0 ∴FBx=-10m
取OAB段:∑My=0 m-Foy×0.1ctg30°=0 ∴FBy=10/3m
取EF及滑块:∑M=0 F×0.1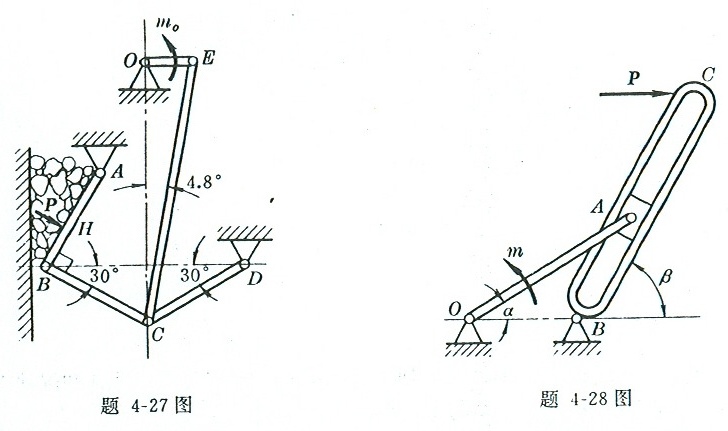 cos30°+P×0.1sin30°=0 ∴F=-P/3
cos30°+P×0.1sin30°=0 ∴F=-P/3
取整体:∑M=0 F×0.1/ cos30°+m-F×0.1-F×0.1 ctg30°=0
∴m/P=0.1155m
4-31解:取整体:∑MA=0 -Fox×4+Wox×4+G×3+G×2cos30°×cos30°=0
∴FO1=32.5kN
∑F=0 F=0
∑F=0 F+F-W-W-G-G=0 ∴F=27.5kN
取A点:∑F=0 F+Scos30°-W1=0 ∴S=-26kN
∑F=0 S+Ssin30°=0 ∴S=13kN
取C点:∑FA=0 -Soxcos60°+Soxcos30°+Scos60°=0
∑FB=0 -Soysin60°-Soysin60°-Ssin30°-G=0
联立上两式得:SE=17.3kN SNF=-25kN
取O点:∑FD=0 -SNFcos60°-Sox+Soycos60°+S=0
1-8解: