题目
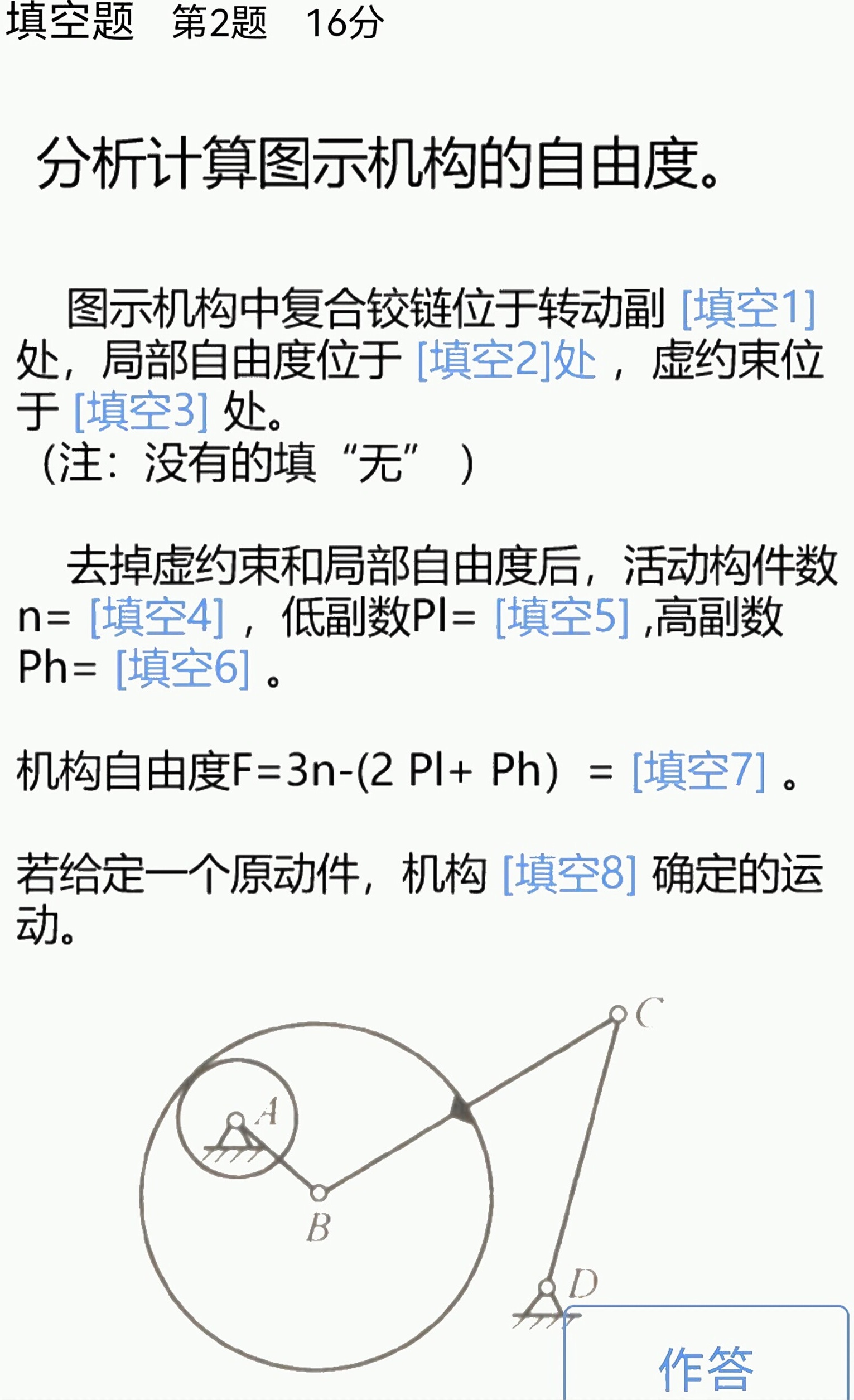
填空题 第2题 16分-|||-分析计算图示机构的自由度。-|||-图示机构中复合铰链位于转动副[填空1]-|||-处,局部自由度位于[填空2]处,虚约束位-|||-于[填空3]处。-|||-(注:没有的填"无")-|||-去掉虚约束和局部自由度后,活动构件数-|||-.n= [填空4],低副数 = [填空5],高副数-|||-.Ph= [填空6]。-|||-机构自由度 =3n-(2p1+ph)= [填空7]。-|||-若给定一个原动件,机构[填空8]确定的运-|||-动。-|||-(-|||-B-|||-D-|||-作答
题目解答
答案
见答案
C;B;D;5;7;0;1;有
C;B;D;5;7;0;1;有
解析
步骤 1:识别复合铰链
复合铰链是指在两个或多个构件之间存在多个转动副的情况。在图示机构中,复合铰链位于转动副C处,因为C处有两个转动副,分别连接了构件B和D。
步骤 2:识别局部自由度
局部自由度是指不影响整个机构运动的自由度。在图示机构中,局部自由度位于转动副B处,因为B处的转动不影响整个机构的运动。
步骤 3:识别虚约束
虚约束是指在机构中重复的约束,对机构的运动没有实际影响。在图示机构中,虚约束位于转动副D处,因为D处的转动副重复了其他转动副的约束。
步骤 4:计算活动构件数
去掉虚约束和局部自由度后,活动构件数n=5,因为有5个活动构件(A、B、C、D、E)。
步骤 5:计算低副数
低副是指两个构件之间的面接触约束,图示机构中低副数P1=7,因为有7个低副(A-B、B-C、C-D、D-E、A-D、B-E、C-E)。
步骤 6:计算高副数
高副是指两个构件之间的点或线接触约束,图示机构中高副数Ph=0,因为没有高副。
步骤 7:计算机构自由度
机构自由度F=3n-(2p1+ph)=3*5-(2*7+0)=15-14=1,因为活动构件数n=5,低副数P1=7,高副数Ph=0。
步骤 8:判断机构运动
若给定一个原动件,机构有确定的运动,因为机构自由度F=1,说明机构有一个原动件可以驱动整个机构运动。
复合铰链是指在两个或多个构件之间存在多个转动副的情况。在图示机构中,复合铰链位于转动副C处,因为C处有两个转动副,分别连接了构件B和D。
步骤 2:识别局部自由度
局部自由度是指不影响整个机构运动的自由度。在图示机构中,局部自由度位于转动副B处,因为B处的转动不影响整个机构的运动。
步骤 3:识别虚约束
虚约束是指在机构中重复的约束,对机构的运动没有实际影响。在图示机构中,虚约束位于转动副D处,因为D处的转动副重复了其他转动副的约束。
步骤 4:计算活动构件数
去掉虚约束和局部自由度后,活动构件数n=5,因为有5个活动构件(A、B、C、D、E)。
步骤 5:计算低副数
低副是指两个构件之间的面接触约束,图示机构中低副数P1=7,因为有7个低副(A-B、B-C、C-D、D-E、A-D、B-E、C-E)。
步骤 6:计算高副数
高副是指两个构件之间的点或线接触约束,图示机构中高副数Ph=0,因为没有高副。
步骤 7:计算机构自由度
机构自由度F=3n-(2p1+ph)=3*5-(2*7+0)=15-14=1,因为活动构件数n=5,低副数P1=7,高副数Ph=0。
步骤 8:判断机构运动
若给定一个原动件,机构有确定的运动,因为机构自由度F=1,说明机构有一个原动件可以驱动整个机构运动。