一平台采用电机加减速机的控制方式,减速机输出直接驱动台体运动,使用增量式编码器反馈,编码器分辨率[1][1]为5000脉冲/转,减速机减速比[2][2]200:1,反馈到控制器[3][3]经过4倍频,此时控制器输出一个脉冲,台体转动度。(1分)绝对式编码器:二进制码盘:在二进制码盘中,码道从外到里按二进制刻制,外层为最低位,里层为最高位,二进制码盘在转动时,可能出现两位以上的数字同时改变,导致“粗大误差”的产生。1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘________当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于座标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度数字转换装置中,目前主要用于角度位置伺服控制系统中1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘莫尔条纹纹距B与光栅节距w和倾角θ之间的关系:光栅横向移动一个节距w,莫尔条纹正好沿刻线上下移动一个节距B,用光电元件检测莫尔条纹信号的变化就可以测量光栅的位移。例:当w = 0.01mm,θ=0.01 red,则B = 1mm,将栅距放大100倍的莫尔条纹宽度。1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘辨向为了辨别运动方向,需配置两个彼此错开1/4纹距的光电元件,使输出电信号彼此在相位上差90°,若以其中的一个作为参考信号,则另一个信号将超前或滞后参考信号90°,由此来确定运动方向。(4)倍频倍频又称为细分,倍频数就是指在莫尔条纹一个周期的范围内,等距离安装的感光元件的数目,从而在一个周期内产生若干个脉冲,达到细分的目的。提高倍频数可以提高光栅的最小读数值,提高分辨率,精密机床的测量常采用高倍频。例:栅距w = 0.01mm,十倍频后,最小读数值1mm.与一般机械系统比较,运动控制系统机械系统的要求:•①定位精度要高•②响应速度要快•③稳定性高•常常提出:无间隙、低摩擦、低惯量、高刚度、高谐振频率、适当的阻尼比•传动机构的种类:齿轮传动机构、滚珠丝杠副、滑动丝杠副、同步带传动副、间歇机构等.•传动机构的特点:传动精度要高、响应速度要快、稳定性高.机械系统----三大结构:影响因素①传动机构:考虑与伺服系统相关的精度、稳定性、快速响应等伺服特性②导向机构:考虑低速爬行现象③执行机构:考虑灵敏度、精确度、重复性、可靠性机械刚度是指机床进给系统中的机械部件在载荷的作用下,产生单位变形所需要的载荷的大小,它反映了机械结构抵抗变形的能力。伺服刚度和机械刚度是两个不同的概念,它是指整个伺服系统,从控制系统到工作台表现出来的抵抗外力而不产生位置偏差的能力。伺服刚度又有伺服静刚度和伺服动刚度之分。交直流伺服系统的比较:直流________驱动技术受________本身缺陷的影响,其________受到了限制。直流________存在机械结构复杂、维护工作量大等缺点,在运行过程中转子容易发热,影响了与其连接的其他机械设备的精度,难以应用到高速及大容量的场合,机械换向器则成为直流________驱动技术________的瓶颈。1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘 交流________克服了直流________存在的电刷、换向器等机械部件所带来的各种缺点,特别是交流________的过负荷特性和低惯性更体现出交流________的优越性。所以交流________在工厂自动化(FA)等各个领域得到了广泛的应用。伺服电机是一种受输入电信号控制,并作出快速响应的电机,其堵转转速与控制电压成正比,转速随着转矩的增加而近似线性下降,调速范围宽,当控制电压为零时能够立即停止。________•①直流(DC)伺服电机•②无刷直流伺服电机•③交流(AC)伺服电机•④步进电机。•按照功率的不同,伺服电机可分为:•小功率随动系统(100W以下)•中功率随动系统(100~500W)•大功率随动系统(500W以上•永磁同步电机具备十分优良的低速性能、可以实现弱磁高速控制,调速范围宽广、动态特性和效率都很高,已经成为伺服系统的主流之选。•异步伺服电机虽然结构坚固、制造简单、价格低廉,但是在特性上和效率上存在差距,只在大功率场合得到重视。•在运动控制系统中,需要对电机的转矩、速度和位置等物理量进行控制。•从控制的角度来看,对直流电机驱动及控制过程有电流反馈、速度反馈和位置反馈等控制形式。1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘PMAC的含义:PMAC是program multiple axis controller可编程的多轴运动控制卡。1110-|||-0001-|||-0010 1101-|||-0011 1100-|||-0100 1011-|||-0101 1010-|||-0110 1001-|||-0111 1000-|||-四位二进制码盘
一平台采用电机加减速机的控制方式,减速机输出直接驱动台体运动,使用增量式编码器反馈,编码器分辨率[1][1]为5000脉冲/转,减速机减速比[2][2]200:1,反馈到控制器[3][3]经过4倍频,此时控制器输出一个脉冲,台体转动度。(1分)
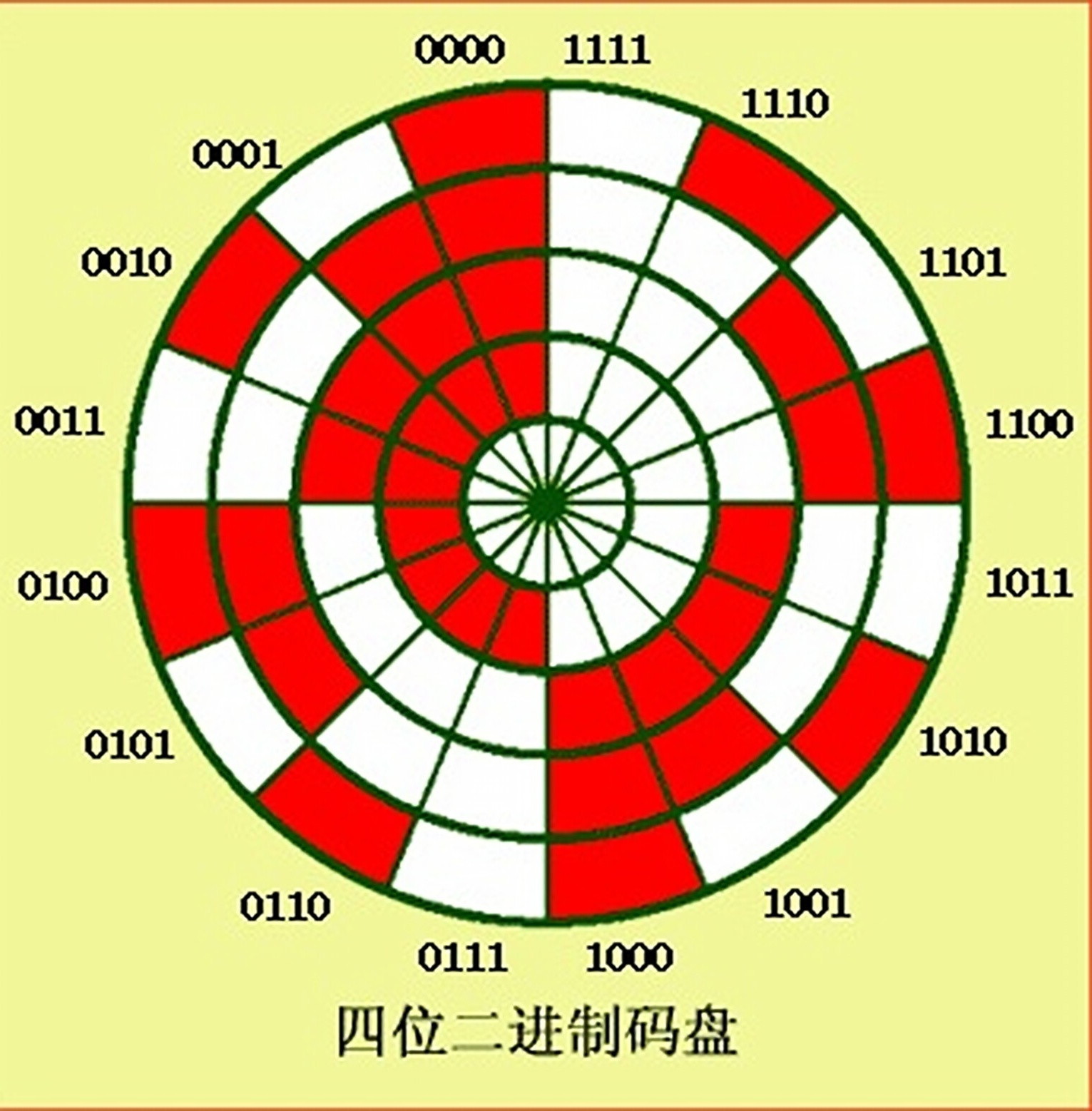
绝对式编码器:二进制码盘:在二进制码盘中,码道从外到里按二进制刻制,外层为最低位,里层为最高位,
二进制码盘在转动时,可能出现两位以上的数字同时改变,导致“粗大误差”的产生。
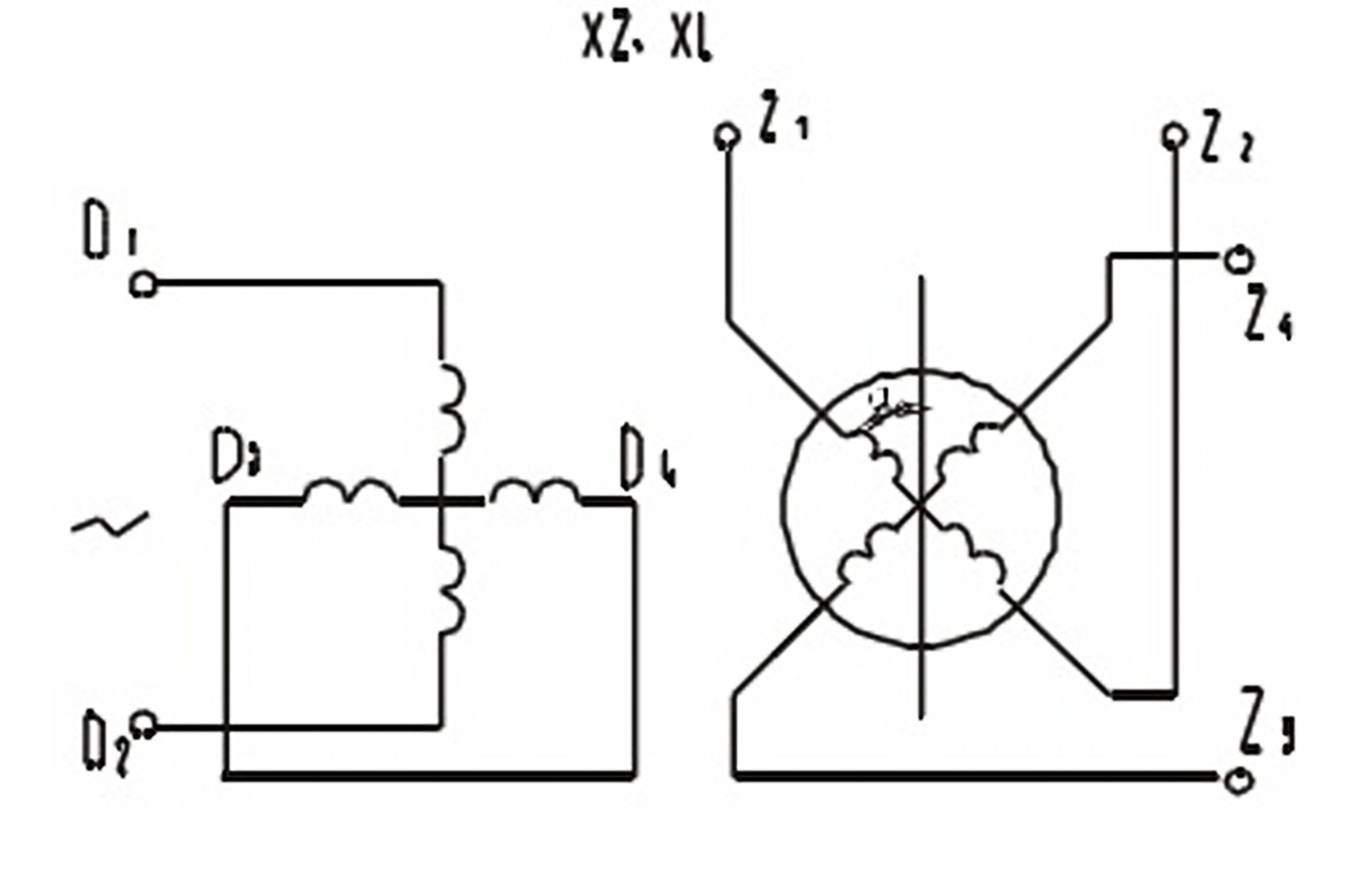
________当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于座标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度数字转换装置中,目前主要用于角度位置伺服控制系统中
莫尔条纹纹距B与光栅节距w和倾角θ之间的关系:光栅横向移动一个节距w,莫尔条纹正好沿刻线上下移动一个节距B,用光电元件检测莫尔条纹信号的变化就可以测量光栅的位移。
例:当w = 0.01mm,θ=0.01 red,
则B = 1mm,将栅距放大100倍的莫尔条纹宽度。
辨向
为了辨别运动方向,需配置两个彼此错开1/4纹距的光电元件,使输出电信号彼此在相位上差90°,若以其中的一个作为参考信号,则另一个信号将超前或滞后参考信号90°,由此来确定运动方向。
(4)倍频
倍频又称为细分,倍频数就是指在莫尔条纹一个周期的范围内,等距离安装的感光元件的数目,从而在一个周期内产生若干个脉冲,达到细分的目的。
提高倍频数可以提高光栅的最小读数值,提高分辨率,精密机床的测量常采用高倍频。
例:栅距w = 0.01mm,十倍频后,最小读数值1mm.
与一般机械系统比较,运动控制系统机械系统的要求:
•①定位精度要高
•②响应速度要快
•③稳定性高
•常常提出:无间隙、低摩擦、低惯量、高刚度、高谐振频率、适当的阻尼比
•传动机构的种类:齿轮传动机构、滚珠丝杠副、滑动丝杠副、同步带传动副、间歇机构等.
•传动机构的特点:传动精度要高、响应速度要快、稳定性高.
机械系统----三大结构:影响因素
①传动机构:考虑与伺服系统相关的精度、稳定性、快速响应等伺服特性
②导向机构:考虑低速爬行现象
③执行机构:考虑灵敏度、精确度、重复性、可靠性
机械刚度是指机床进给系统中的机械部件在载荷的作用下,产生单位变形所需要的载荷的大小,它反映了机械结构抵抗变形的能力。
伺服刚度和机械刚度是两个不同的概念,它是指整个伺服系统,从控制系统到工作台表现出来的抵抗外力而不产生位置偏差的能力。
伺服刚度又有伺服静刚度和伺服动刚度之分。
交直流伺服系统的比较:
直流________驱动技术受________本身缺陷的影响,其________受到了限制。直流________存在机械结构复杂、维护工作量大等缺点,在运行过程中转子容易发热,影响了与其连接的其他机械设备的精度,难以应用到高速及大容量的场合,机械换向器则成为直流________驱动技术________的瓶颈。
 交流________克服了直流________存在的电刷、换向器等机械部件所带来的各种缺点,特别是交流________的过负荷特性和低惯性更体现出交流________的优越性。所以交流________在工厂自动化(FA)等各个领域得到了广泛的应用。
交流________克服了直流________存在的电刷、换向器等机械部件所带来的各种缺点,特别是交流________的过负荷特性和低惯性更体现出交流________的优越性。所以交流________在工厂自动化(FA)等各个领域得到了广泛的应用。
伺服电机是一种受输入电信号控制,并作出快速响应的电机,其堵转转速与控制电压成正比,转速随着转矩的增加而近似线性下降,调速范围宽,当控制电压为零时能够立即停止。
________
•①直流(DC)伺服电机
•②无刷直流伺服电机
•③交流(AC)伺服电机
•④步进电机。
•按照功率的不同,伺服电机可分为:
•小功率随动系统(100W以下)
•中功率随动系统(100~500W)
•大功率随动系统(500W以上
•永磁同步电机具备十分优良的低速性能、可以实现弱磁高速控制,调速范围宽广、动态特性和效率都很高,已经成为伺服系统的主流之选。
•异步伺服电机虽然结构坚固、制造简单、价格低廉,但是在特性上和效率上存在差距,只在大功率场合得到重视。
•在运动控制系统中,需要对电机的转矩、速度和位置等物理量进行控制。
•从控制的角度来看,对直流电机驱动及控制过程有电流反馈、速度反馈和位置反馈等控制形式。
PMAC的含义:
PMAC是program multiple axis controller可编程的多轴运动控制卡。
题目解答
答案
旋转变压器是一种输出电压随转子[4][4]转角变化的信号元件。 伺服 电机 发展 伺服电机 伺服 发展 伺服电机 伺服电机 伺服电机 伺服系统[5][5] 伺服系统 运动控制中常用的伺服电机类型: